無人機認知邊緣計算資源分配與軌跡優化方案
2021-04-19 13:30:16劉伯陽楊寧樂萬奕堯
西安郵電大學學報 2021年1期
劉伯陽,楊寧樂,馬 杰,萬奕堯,李 明
(1.西安郵電大學 通信與信息工程學院,陜西 西安 710121; 2.盲信號處理國家級重點實驗室,四川 成都 610041)
移動邊緣計算(Mobile Edge Computing,MEC)技術是5G與B5G關鍵技術之一。其核心原理是用戶可以通過無線鏈路將待計算任務卸載到具有強大計算能力的邊緣服務器,服務器計算結束后將計算結果返回用戶。頻譜資源的稀缺性和移動設備的爆炸式增長,為所有用戶分配獨立的頻譜資源是不現實的。因此,頻譜資源在MEC網絡中至關重要。
認知無線電是一種動態頻譜共享技術,可以有效緩解MEC網絡中頻譜資源稀缺問題。在認知無線電網絡中,次用戶(未授權用戶)可在滿足主用戶(授權用戶)干擾溫度約束(即對主用戶的干擾功率不能超過一個預設的門限)的條件下接入主用戶頻段[1-2]。顯然,可以將認知無線電技術應用到移動邊緣計算中,為次用戶提供頻譜接入機會用以任務卸載。通常邊緣服務器部署位置固定,在這種情況下,主用戶的干擾溫度約束會影響次用戶邊緣計算服務質量。
通過在具有高機動性的無人機上部署邊緣服務器,可以為認知無線電網絡中的次用戶提供靈活的MEC服務。 近年來,基于無人機的邊緣計算和基于無人機的認知網絡得到了越來越多的關注[3]。文獻[4-5]研究了在無人機作為邊緣計算服務器和中繼節點時無人機和用戶總能耗最低的資源優化方案。文獻[6]通過聯合優化物聯網設備的關聯、服務順序和無人機參數最小化無人機能耗。文獻[7]提出了多個無人機為地面用戶提供服務的思想,基于博弈論對無人機空間位置進行優化,對計算資源進行定價,對用戶卸載策略與請求的計算量進行聯合優化,使得無人機自身收益最大,同時最小化用戶開銷。文獻[8]中,無人機作為中繼與MEC服務器,將源節點的信息轉發至目的節點,同時對源節點的數據進行輔助處理,最大化系統總分享數據量與系統能耗的比值,即系統能效。針對無人機認知網絡,文獻[9]在無人機準靜態與機動場景下,分別研究了無人機軌跡與發射功率的聯合優化問題,在滿足主用戶干擾溫度約束條件下最大限度地提高了次用戶的平均可達速率。文獻[10]研究了主用戶和竊聽者位置不確定情況下平均安全信息速率最大化問題。
值得注意的是,在現有研究工作中,只是將基于無人機的邊緣計算和基于無人機的認知無線電網絡作為兩個獨立的方向進行研究,并未考慮二者的結合。為了進一步提高MEC系統的性能,提出了一種新的基于無人機的認知邊緣計算網絡架構。該架構利用認知網絡中部署了邊緣服務器的無人機為地面上的次用戶提供服務,在滿足主用戶干擾溫度約束、次用戶任務完成約束以及無人機軌跡約束的條件下,最小化無人機與次用戶加權總能耗。針對所建立的非凸問題,提出了一種基于連續凸近似算法的3階段交替迭代優化算法對其求解。
1 系統模型
如圖1所示,考慮一個基于無人機的認知邊緣計算網絡。該網絡包含一個部署了邊緣服務器的旋翼無人機,M個位于地面的主用戶以及K個位于地面的次用戶。假設所有設備都配備了單天線。令м={1,2,…,M}和κ={1,2,…,K}分別表示主用戶與次用戶的集合。無人機從起點qs飛往終點qF并在途中協助次用戶執行計算任務。令(Ik,Ck,Ok,Tk)表示第k個次用戶的計算任務,其中Ik表示任務輸入數據的大小,Ck表示次用戶執行1 bit數據所需中央處理器(Central Processing Unit,CPU) 時鐘周期,Ok∈(0,1)表示任務輸出數據與輸入數據大小的比值,即輸出數據大小為OkI,Tk表示用戶k任務的最大延遲。

圖1 無人機認知邊緣計算網絡模型
1.1 坐標系和信道模型

(1)
(2)
其中:ρ表示在參考距離為1 m下的信道功率增益;q[n]表示無人機在第n個時隙時的水平坐標。與文獻[4]類似,假設的信道具有互易性。假設無人機在單個時隙內勻速直線飛行,其飛行速度可以表示為
(3)
每個時隙的長度通常很短,因此,無人機在每個時隙飛行時間內可以被認為處于靜止狀態[4-6]。
1.2 坐標系和信道模型
卸載任務處理時隙結構示意圖如圖2所示,每個時隙被進一步分割為3個子時隙,分別用來執行次用戶任務卸載(時長比例為θ0)、無人機處理用戶卸載的任務數據(時長比例為θ1)以及無人機將任務結果下載到用戶(時長比例為θ2)。采用部分卸載模式,在此模式下,第k個次用戶的計算任務可以被任意分割為兩個部分,一部分在次用戶本地執行計算,另一部分被卸載到無人機上進行輔助計算。
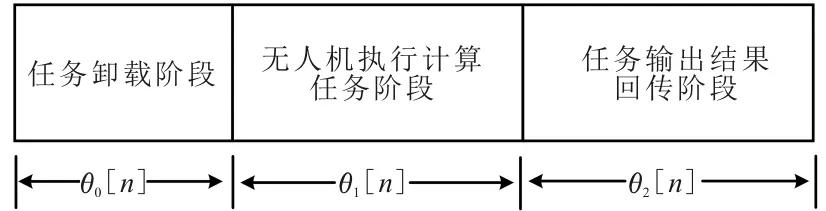
圖2 卸載任務處理時隙結構
令fl,k[n]表示在第n個時隙第k個次用戶的CPU時鐘頻率,則第k個次用戶在本地計算的比特數可以表示為
(4)
根據文獻[4],在第n個時隙第k個次用戶執行本地計算所消耗的能量可以表示為
(5)
其中υl是一個由次用戶硬件決定的常數,單位為J/(s·Hz3)。
為了避免次用戶之間的干擾,在次用戶任務卸載階段次用戶與無人機采用時分多址協議(Time Division Multiple Access,TDMA),任務卸載子時隙被進一步分割為L個相等的時間段(L=K),分別分配給K個次用戶執行任務卸載。在第n個時隙第k個次用戶的卸載的任務比特數和相應的能量消耗可以分別表示為
(6)
(7)

(8)

根據文獻[5],無人機的功耗模型可以表示為

(9)
其中:P0和PH分別表示無人機在懸停狀態下的葉片輪廓功率和誘導功率;υ0,Utip,d0,π,s,和A分別表示懸停時的平均葉片誘導速度(單位為m/s),無人機旋翼尖端速度(單位為m/s),無人機機身阻力比、空氣阻力(單位為kg/m3),無人機旋翼穩定性以及無人機旋翼面積(單位為m2)。因此,無人機在第n個時隙的飛行能耗可以表示為
EU[n]=P(‖ν[n]‖)T
(10)
與飛行能耗相比,無人機將計算結果傳輸給次用戶所消耗的能量可以忽略不計。因此,忽略了無人機數據傳輸階段的能量消耗[11-13]。
2 能耗最小化資源分配方案
通過聯合優化次用戶的CPU時鐘頻率與發射功率、時隙分配和無人機的軌跡最小化次用戶與無人機的加權總能耗。主用戶和次用戶之間的信道是時變且不可預測的,因此,通過一次優化設計出一整條無人機的軌跡是難以實現的。基于此,提出了一個逐時隙的優化方案,即在每個時隙內對次用戶發射功率、時鐘頻率、時隙分配比例和無人機的位置進行優化。第n個子時隙,令L[n]=[fl,k[n],pk[n]表示時鐘頻率與傳輸功率組成的矩陣,θ[n]=[θ0[n],θ1[n],θ2[n]]表示時隙分配比例組成的向量。系統加權能耗之和最小化問題建模為
s.t.C1ll,k[n]+lo,k[n]≥Qk[n]
C30≤fl,k[n]≤fl,max,0≤pk[n]≤pl,max
C4pu,k[n]gm[n]≤Γ
C5pk[n]ρkm[n]≤Γ
C6θ0[n]+θ1[n]+θ2[n]=1
C7θ0[n],θ1[n],θ2[n]≥0
C8‖q[n]-q[n-1]‖≤VmaxT
C9q[0]=qS,q[N]=qF
C10‖q[n]-qF‖≤(N-n)VmaxT
其中:η>0表示與無人機能耗的權重;Qk[n]表示在第n個時隙第k個次用戶需要完成的最小任務比特數;Γ表示主用戶能容忍的最大干擾功率容限;Vmax表示無人機的最大飛行速度;fl,max和fu,max分別表示次用戶與無人機的最大CPU時鐘頻率;pl,max表示次用戶的最大傳輸功率。式C1表示次用戶最低計算任務比特約束;約束C2保證了無人機能夠完成次用戶卸載的所有任務;C3為各次用戶運行的相關參數約束;C4-C5保證任意次用戶與無人機對用戶造成的干擾不超過主用戶的干擾容限,以保證主用戶的服務質量;C6-C7為與時隙分割有關的約束;約束C8限制了無人機的最大飛行速度;C9為無人機運行的起點與終點約束。該文采用的是逐時隙優化方案,C10保證了無人機在第N個時隙能夠飛行到終點。約束C10導致在最后一個時隙,無人機需要直接飛往終點。因此,在最后一個時隙不執行對相關參數的優化,在前N-1個時隙,每個時隙內的計算比特數需要滿足Qk[n]≥Ik/N-1以保證次用戶的全部計算任務都被按時執行。
顯然,問題P1中目標函數、約束C1、約束C4以及約束C5非凸,導致問題P1為一個非凸問題。為了對其求解,提出一個3階段交替迭代優化算法。首先,固定時隙分配向量θ[n]與無人機位置q[n],優化次用戶CPU時鐘頻率與傳輸功率L[n]。其次,利用前一步優化得到的L[n]并固定無人機軌跡q[n]求解最優時隙分配θ[n]。最后,基于前兩步優化得到的L[n]和θ[n]求解最優無人機軌跡q[n]。具體而言,在第一步中,固定時隙分配θ[n]與無人機位置q[n]后用于優化次用戶CPU時鐘頻率與傳輸功率的子優化問題可以表示為
約束C2非凸,導致子優化問題P1.1也是一個非凸問題。為了對其進行求解,利用連續凸近似算法[14]處理非凸約束C1,用凸函數對其近似。考慮約束C1不等式左邊對數項是一個關于傳輸功率pk[n]的凹函數,其在任意一點處的一階泰勒展開式均是其全局上界。具體而言,其一階泰勒展開式可以表示為

(11)
其中,pk,j[n]表示連續凸近似方法中第j次迭代時的任意可行點。根據問題P1中約束C3-C5,第k個次用戶的最大傳輸功率可以表示為
(12)
則P1.1的凸近似問題可以表示為
s.t.C1ll,k[n]+lo,k[n]≥Qk[n]
C20≤fl,k[n]≤fl,max,0≤pk[n]≤pk,max[n]

算法1求解P1.1的連續凸近似算法
步驟1初始化。選擇步長rj[n]∈(0,1],輸入初始可行點pk,0[n],令j=0。
否則轉入下一步。


步驟5令j+1→j,返回步驟2。
步驟2中,基于步驟1優化得到次用戶的CPU時鐘頻率與傳輸功率L[n],固定無人機的軌跡q[n],實現對時隙分配θ[n]的優化。相應的子優化問題可以表示為
問題P1.2是一個簡單的線性規劃問題,其具有凸性,很容易求解。
步驟3中,基于步驟1和步驟2優化得到的L[n]和θ[n],需要進一步對無人機的位置進行優化,相應的子優化問題可以表示為

(13)
雖然式(13)是一個非凸約束,但其不等式左邊是一個凸函數,并且在任意一點的一階泰勒展開式均是其全局下界,因此依然可采用連續凸近似算法處理這個非凸約束,得到其凸近似。具體來說,其一階泰勒展開式可以表示為

(14)
其中,τ1,j和τ2,j表示連續凸近似算法中第j次迭代時的任意可行點。于是,問題P1.3中P(‖v[n]‖)可近似表示為

(15)
C1不等式左邊存在對數項,而無人機與次用戶之間的信道功率增益又滿足式(2),故對數項對無人機的軌跡q[n]來說是一個非凸函數,但其對‖q[n]-wk‖2整體是一個凸函數。因此,在任意給定的可行點qj[n],對數項的下界可以表示為

(16)
通過引入輔助變量β0,k[n]≥1,約束C4-C5,可以分別被重寫為
(17)
(18)

Okθ0[n]β1,k[n]≤θ2[n]log2(β0,k[n])
(19)
其中,k∈K,n∈N。而根據式(2)可得
(20)
式(20)右端是一個凸函數,因此,其在任意一點處的一階泰勒展開式均是其全局下界,其一階泰勒展開式可以表示為
Ψ3,k,j[n]=H2+‖qj[n]-wk‖2+
2(qj[n]-wk)T(q[n]-qj[n])
(21)
(22)
式(22)右端是一個凸函數,同理其在任意一點處的一階泰勒展開式均是其全局下界,具體可以表示為
Ψ4,k,j[n]=2β1,k,j[n]×ln2(β1,k[n]-β1,k,j[n])+
2β1,k,j[n]-1
(23)
其中,β1,k,j表示在連續凸近似算法中,第j次迭代時β1,k的任意可行點。根據式(1)、式(2)以及文獻[14]中的例4,式(18)可以表示為凸近似形式,即

(24)
輔助變量β3,k[n],滿足‖q[n]-wk‖2≤β3,k[n]且有
Ψ5,m,j[n]=2(qj[n]-dm)T(q[n]-qj[n])+
‖qj[n]-dm‖2
(25)

(26)
其中,β0,k,j[n],β3,k,j[n]為第j次迭代時β0,k[n],β3,k[n]的可行解。問題P1.3的近似凸優化問題可以表示為
s.t.C1v1[n]≥‖v[n]‖
C5β2,k[n]≤Ψ3,k,j[n]
C7‖q[n]-wk‖2≤β3,k[n]
C8β0,k[n]≥1,β1,k[n]≥0,β2,k[n]≥0
C9β3,k[n]≥0
C10(20),(24)
C8,C10問題P1中約束
其中,β={β0,k,β1,k,β2,k,β3,k}表示輔助變量組成的向量。問題P1.3.1是一個凸優化問題,可以利用凸優化工具箱有效求解。令Θj[n]=[v1,j[n],v2,j[n],β0,k,j[n],β1,k,j[n],β3,k,j[n],[qj[n]],求解子優化問題P1.3的具體步驟總結在算法2中,第二步中的終止條件為Θj[n]收斂到問題P1.3的一個駐點。
算法2求解P1.3的連續凸近似算法
步驟1初始化。選擇合適步長r[n]∈(0,1],輸入初始可行點Θ0[n],令j=0。
步驟2若Θj[n]滿足終止條件,則停止,輸出最優解Θ*[n]=Θj[n],否則進入下一步。
步驟3從P1.1.1中計算Θ*(Θj[n])。
步驟4更新可行點Θj+1[n]。
Θj+1[n]=Θj[n]+rj[Θ*(Θj[n])-Θj[n]]。
步驟5令j+1→j,返回步驟2。
基于上述分析,為了求解上述復雜非凸優化問題P1,提出了一種3階段交替迭代優化算法,該算法的具體步驟總結在算法3中。
算法3求解原始問題P1的3階段交替迭代優化算法
步驟1初始化。給定Θ0[n]與無人機的位置q0[n]。
步驟2若原始問題P1的目標函數值收斂,則結束,否則進入下一步。
步驟3利用算法1求解子優化問題P1.1,得到最優解L*[n]。
步驟4求解子優化問題P1.2得到最優解Θ*[n]。
步驟5利用算法2求解子優化問題P1.3獲得最優解q*[n],返回步驟2。
3 性能仿真及分析
針對提出的算法進行仿真和性能分析。信道功率增益設置為
其中:a為路徑損耗參數;dkm為第k個次級用戶和第m個主用戶之間的距離;ξkm是均值為1指數分布的隨機變量[15]。與無人機相關的仿真參數設置參考了文獻[5]中的設置。為了不失一般性,詳細仿真參數如表1所示。提出的加權能耗最小化算法是通過逐時隙優化來實現的,為表述簡潔,移除時隙索引n。

表1 仿真參數
圖3和圖4描述了在不同主、次用戶分布情況下的無人機的軌跡變化情況。從圖3和圖4中可以看出,無人機將在靠近次級用戶的前提下盡可能遠離主用戶飛行。為了保證主用戶的服務質量,主用戶干擾門限嚴格約束了無人機與主用戶之間的距離,因此,無人機將遠離主用戶飛行以減少對主用戶的干擾。另外,主用戶與次級用戶之間的信道功率增益是由其之間的距離決定的,而更高的信道增益將更有利于降低無人機與次級用戶之間的通信能耗,有助于用戶與無人機之間的任務卸載。
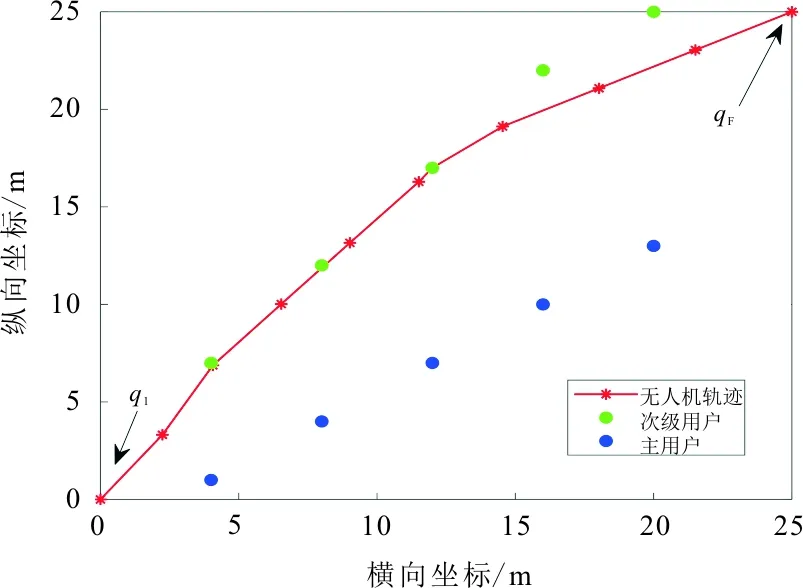
圖3 不同用戶位置分布情況下無人機軌跡

圖4 不同用戶位置分布情況下無人機軌跡
圖5描述了無人機和次級用戶的加權總能耗和無人機最大飛行速度和待執行任務比特數之間的關系。在實驗中,所有的次級用戶待執行任務比特數均相等。更高的待執行比特數將導致次級用戶消耗更多的能量執行運算及卸載,從而導致系統加權總能耗的上升。因此,隨著待執行任務比特數的增加,各方案的加權總能耗均上升。隨著無人機最大飛行速度的增加,能耗降低。從數學角度看,無人機最大飛行速度越大,在一個時隙內無人機軌跡設計的可行域就越大,目標函數的值就可能越低。

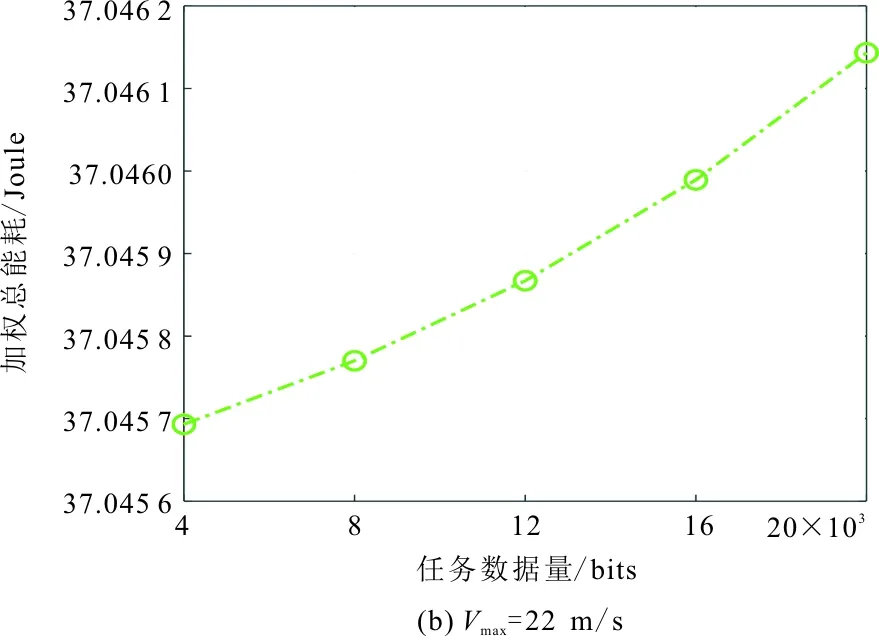


圖5 無人機和次級用戶加權總能耗隨無人機最大飛行速度Vmax和任務比特數的關系
4 結語
將無人機、認知無線電與邊緣計算相結合構造基于無人機認知邊緣計算網絡架構,可為認知網絡中的次用戶提供靈活的邊緣計算服務,并利用認知無線電技術進一步提升邊緣計算網絡中的頻譜利用率。提出了利用基于連續凸近似的3階段迭代算法,對無人機軌跡與計算資源以及用戶計算資源與卸載功率進行優化設計,從而最小化用戶與無人機加權能耗和。仿真結果表明,無人機的飛行軌跡應盡可能貼近次用戶飛行,以避免對主用戶造成過度干擾,同時節約次用戶的任務卸載能耗。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
現代企業(2015年2期)2015-02-28 18:45:09
創業家(2015年10期)2015-02-27 07:55:08
