康復醫療輔助手臂設計
2021-04-19 07:27:56郝金雙姜文博王承禹李玲玲
機械工程師 2021年4期
關鍵詞:康復
郝金雙, 姜文博, 王承禹, 李玲玲
(遼寧科技大學,遼寧 鞍山114051)
0 引言
現階段隨著我國生活水平不斷的提高,人們作息時間的不規律和高油高鹽食品的攝入量增加,患有心腦血管疾病的患者數量也在逐漸增加。我國腦卒中篩查調查研究的結果中顯示,2007—2017年我國缺血性腦卒中發病率由2007年的119/10萬,持續上升到2017年的156/10萬,年均增長2.74%,明顯高于1997—2007年的年均增長率(0.98%)[1]。在過去的臨床實踐中,缺血性腦卒中不僅危險,而且容易留下嚴重的后遺癥,甚至出現偏癱的情況。腦卒中偏癱是由于運動系統失去對上中樞神經的控制,導致四肢對身體肌群的協調和控制功能紊亂同時,與此同時患者的肌張力也會紊亂,進而出現運動功能障礙,相關研究也表明運動療法在改善肢體功能恢復方面有積極的作用[2]。缺血性腦卒中后遺癥恢復運動的本質是學習與鍛煉的結合,通過多次的學習和鍛煉調動未損傷腦組織的重組和重建功能,需要患者心理上的理解接受并積極主動地參與康復。在病情的急性期間,缺血性腦卒中后遺癥恢復運動主要是抑制原始的異常反射活動,重新建立正常的運動模式,同時對肌肉的力量加強訓練。
而且現在工作壓力非常的大,當家中有人需要此類照顧時,由于工作緣故很難抽出時間照顧,而患者由于病情原因,在沒有人輔助的情況下很難自行加強肌肉訓練,所以為了改善缺血性腦卒中后遺癥患者的肢體活動能力,設計了一款康復醫療輔助手臂,可以更加簡單便捷地進行肌肉力量訓練。
1 研究目的及意義
針對腦血管疾病患者后遺癥手臂不能自主運動的問題,并結合缺血性腦卒中康復運動實質,運用蝸輪、蝸桿、絲杠、仿生學結構等技術來實現幫助患者肢體康復的活動目標,同時使患者可以不用通過其他人或者器械的幫助,直接使用輔助手臂做手臂往復運動,來進行肌肉活動、肌肉張力緩解和肢體運動神經保護。并且解決患者手臂承載能力的問題,設計一個可以實現自動伸縮、自如切換運動方向、主體運動部分和承載部分分開的,符合康復運動實質需求并且方便實用的康復醫療輔助手臂。
這樣一款輔助手臂可以順應市場需求,為更多的缺血性腦卒中患者服務,讓他們能夠減輕缺血性腦卒中后遺癥帶來的困擾,同時可以減輕家中親人的工作壓力和生活負擔,這也將是未來市場的一個發展方向。
2 輔助手臂的結構,功能方案研究
康復醫療輔助手臂設計的康復理念依附于Janef在20世紀80年代提出的運動再學習恢復方案[3],將缺血性腦卒中后遺癥患者恢復鍛煉的內容轉移到平常的生活當中,利用大腦的功能可塑性,輔助手臂帶動手臂被動運動,通過再學習重新獲得新的運動能力。在傳統Bobath康復療法的基礎上,增加了為期1個月的運動再學習計劃后,缺血性腦卒中偏癱患者的運動功能評分及患者的平衡能力也得到了明顯的改善。運動再學習方案作為患者積極參與康復治療的模式,患者依從性高,康復效果明顯,值得廣泛發展。康復醫療輔助手臂設計的結構分為主要工作部分和承載支架部分,主要工作部分負責帶動上肢做被動運動對肢體進行肌肉收縮控制訓練。承載支架的設計解決患者手臂因為承載能力差而不可單獨佩戴的問題,同時考慮患者手臂因長時間不能自主運動導致的肱二頭肌和肱三頭肌處的肌張力過高,在輔助手臂帶動下手臂做被動運動患者會感到疼痛,在輔助手臂主體工作的上半部相對手臂肱二頭肌部分設計震動按摩器。
3 主要工作部分具體設計
圖1中,上臂固定裝置1采用彈性材料以便于手臂上臂的夾緊,同時寬度設計基本符合普通人上臂的寬度,以免過分夾緊導致血液循環不利,加重患者病情。內部材料選用相對柔軟并可以直接接觸皮膚的材料,這樣炎熱的夏天使用者可以穿著短袖或者直接袒露上臂使用。根據肱二頭肌相應位置在上臂固定裝置2的兩側設內凹的安裝槽一,且安裝槽一沿豎直方向開設,在此安裝槽內安裝上臂按摩裝置3,在整體運行時通過震動按摩來緩解使用者的肌張力。所述上臂按摩裝置3由電動機3-1、絲杠3-2、絲母3-3及震動按摩器3-4組成;所述電動機3-1設于安裝槽一的一端,電動機軸與絲杠3-2的一端相連,絲杠3-2的另一端伸入安裝槽一另一端開設的絲杠孔中;所述震動按摩器3-4一通過絲母3-3與絲杠相連3-2;在電動機3-1的驅動下帶動絲杠3-2正轉與反轉,絲杠3-2與絲母3-3傳動配合,帶動震動按摩器一3-4在安裝槽一內豎直移動,擴大按摩區域。同時震動按摩器一3-4可以調節振幅以控制按摩程度的大小,這樣就可以達到按摩區域可調、按摩程度可調,以使患者上臂達到舒適狀態進行恢復訓練。

圖1 主要工作部分
下臂固定裝置2根據人體手臂下臂形狀設計,靠近肘關節側較寬、靠近腕關節側較窄,適應人體手臂下臂形狀,內外材料與上臂固定裝置1相同,這樣方便固定下臂并使使用者使用舒適。在下臂固定裝置2靠近肱橈肌位置設內凹的安裝槽二,安裝下臂震動按摩器4,通過震動按摩以緩解肱橈肌的肌張力,可使手指達到相應的放松程度,由于肱橈肌體積小于肱二頭肌,所以此震動按摩器無須移動,只調節震動幅度改變按摩效果即可。
所述上臂固定裝置1在靠近下臂固定裝置2一端的兩側分別設延長臂一,所述下臂固定裝置2在靠近上臂固定裝置1一端的兩側分別設延長臂二,并且延長臂一與延長臂二一一對應設置;其中一側延長臂一與延長臂二的外側設轉動連接機構,內側設連接板一9;另外一側延長臂一與延長臂二的外側設連接板二9;所述轉動連接機構由連接電動機5、蝸桿6、蝸輪7及傳動軸承8組成;所述連接電動機5設于其中一個延長臂一的外側,連接電動機5的電動機軸與蝸桿的6一端相連;所述蝸輪7為帶軸蝸輪,其上的短軸通過傳動軸承8與對應的延長臂二相連,蝸輪7與蝸桿6傳動連接;所述傳動連接機構通過連接電動機5轉動帶動蝸桿6轉動,蝸桿6和蝸輪7配合工作改變運動方向,通過傳動軸承8使下臂固定裝置2做往復運動,同時連接電動機5運動轉速可調,以致下臂固定裝置2運動速度可調。由于手臂在肌張力過高時,做快速或強制被動運動會導致疼痛或者肌肉拉傷,甚至斷裂,所以下臂固定裝置2運動速度的調整應該與上臂震動按摩器4按摩效果相關聯,當震動按摩緩解肌張力以后,連接電動機5開始工作,輔助臂開始進行往復運動,當按摩效果和運動速度令使用者感到舒適時,主體工作部分持續工作相應時間后達到康復運動目的。
4 承載支架部分設計
工作部分固定裝置10用于固定上臂固定裝置1,選用彈性較好的材料方便夾緊固定。在裝置下設計連接部分,連接部分設計為半球形以便工作部分固定裝置10部分可以活動,能使使用者在使用時找到合適的姿勢來進行恢復鍛煉。
由于使用者身高不同和使用時坐立姿勢不同,所以承載裝置應該可以調節高度,所以支桿設計成兩部分。上部支桿11下部中空、下部支桿12上部中空,上部支桿11安裝在下部支桿12上作為承載支架的主體。上部支桿11與工作部分固定裝置10連接,在下部支桿12底部安裝底座15,底座15與地面成四腳接觸,使承載支架更加穩定(可裝滾輪方便移動)。
調節螺栓13安裝位置固定在下部支桿12上,調節螺母14與調節螺栓13配合,上部支桿11與調節螺母14緊密配合,當旋轉調節螺柱時由于螺柱不能移動,調節螺母14隨著調節螺柱的轉動而上下移動,以達到整個承載支架的高度調節。
承載支架調節螺栓13采用剛度相對比較大的材料,其他裝置應選取彈性、韌性較好的材料,同時選取輕質材料,方便移動。
5 輔助手臂整體
為解決使用者手臂承載能力問題和恢復效果,主要工作部分應配合承載部分一起工作,同時該輔助手臂主體工作部分還配有藍牙裝置,可通過手機或遙控器來調控按摩器震動按摩幅度、運動速度等,以給使用者更好的使用體驗。
康復醫療輔助手臂通過帶動患者手臂做被動往復運動,從而達到運動再學習的目的,運動再學習后可促進腦組織中產生新功能連接的關鍵性刺激,并且可以增強和刺激大腦皮層的活動,提高神經系統的興奮性,為肢體功能的恢復打下良好的基礎。根據康復理論, 大腦具有一定的可塑性[4]。缺血性腦卒中后的大腦可通過改善中樞神經系統的可塑性,促進腦組織周圍健康,側腦細胞補償可以加速側支循環的建立,促進功能恢復。康復醫療輔助手臂的使用,利用運動再學習療法進行多次運動和學習,利用大腦功能可塑性抑制原始的異常反射活動,重新建立正常運動模式,達到基本恢復效果。
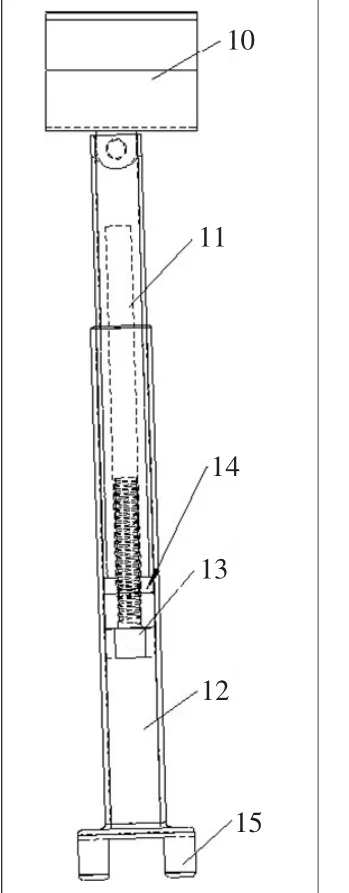
圖2 承載支架10.工作部分固定裝置 11.上部支桿12.下部支桿 13.調節螺栓 14.調節螺母 15.底座
6 結語
1)本康復手臂設計結構簡單,使用方便、佩戴簡單,可以單獨佩戴減輕其他照看人員的工作壓力。
2)上固定臂中的上臂按摩裝置的按摩區域可小幅調整,按摩幅度及速度均可調節,可以對患者的上臂功能區進行充分的按摩,協助其功能恢復;下固定臂中的下臂按摩裝置的按摩模式與上臂按摩裝置相配合,實現對患者上肢的協調性按摩。
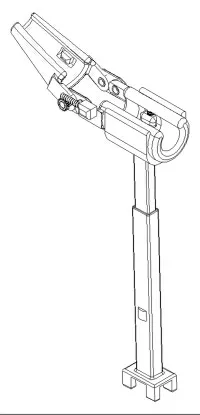
圖3 康復醫療輔助手臂整體
3)同時配備了高度可調的升降支撐機構,保證使用者能夠將上肢調整到適宜的放松姿態,以促進康復效果。
4)可通過外部智能終端(如手機或遙控器)調控2個震動按摩器的震動按摩幅度及速度等,使用更加方便。
綜合腦卒中后遺癥康復理念與目前社會發展形勢,希望該康復手臂能為腦卒中后遺癥患者帶來福音。
猜你喜歡
康復(2023年11期)2023-11-20 07:45:54
康復(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護理與康復(2021年2期)2021-03-05 08:10:44
家庭醫學(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復醫學(2017年7期)2017-01-16 01:11:02
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45