
最小均方電液負載模擬器加載系統控制研究
2021-04-20 08:14:50李建英謝寅凱
中國測試 2021年3期
李建英,謝寅凱,謝 帥
(哈爾濱理工大學機械動力工程學院,黑龍江 哈爾濱 150080)
0 引 言
電液伺服系統的主要優勢特點是響應速度快、功率-體積比大、抗負載剛度大等[1]。電液負載模擬器是電液伺服系統的一項重要應用,因其上述絕對優勢,主要被用在測試飛行器或船舶等在行進的過程中,其受載荷舵面在受到各種載荷譜作用下的響應性能[2-4]。為了使動態模擬性能能夠達到被加載對象在實際應用使用時的真實效果,加載系統的性能指標中必須要有精確性、及快速地復現各種對應載荷譜的要求,從而具有良好的動態加載性能。由于電液負載模擬器的加載系統在動態加載的工況下,還受到被加載系統(舵機系統)按照實際需要運動時,在活塞桿之間剛性連接情況下,對加載系統施加的強干擾,就會在加載系統中產生強迫流量,由于流量和壓力之間的非線性關系,進而在加載系統的執行機構中形成多余力[5-7]。當多余力和實際需要的精確加載力交融后作為加載系統總和輸出力的時候,力加載精度就會被嚴重降低,甚至可以達到所需精確加載力的若干倍,嚴重影響了電液負載模擬器的動態加載性能,而且動態運動頻率越高,力加載精度越差,呈惡化趨勢[8]。目前,削弱多余力以提高力的動態加載性能依然是研究的熱點問題,解決這一難題的措施主要有硬件結構改型和采用合適的控制策略或對策略算法規則進一步改進以達到新的實際控制效果兩個主要方向[9-10],也取得了相應的進展,達到了較好的應用效果。但是,在系統動態加載頻率要求進一步提高、對系統的快速性有更高要求的時候,動態加載力的誤差仍然比較大的矛盾依然會顯現出來,主要表現在由于多余力的存在而使加載輸出力的幅值比理論輸出值大、相位也會比輸入信號的相位超前嚴重。
為了解決在不斷提高加載頻率的快速性指標需求情況下,動態力加載精度性能反而不高的實際現狀,本文提出了基于最小均方算法的神經網絡控制策略應用于電液負載模擬器加載系統。為加載系統設計新的控制器,將其設置在輸入信號和加載系統之間,其工作原理是:將設定信號經過相應權值運算后的輸出量與加載系統輸出信號經過相應權值運算后的輸出量做差,得到的二者之間的差值,即為整個神經網絡控制輸出的誤差,再將該誤差作為權值自身調整算法的輸入,就可以通過反復在線實時調整各個相應權值,從而實現輸出力與設定信號之間的差值逐漸縮小的目的,使得二者趨于同步。
1 電液負載模擬器的數學模型
電液負載模擬器的等效圖如圖1所示,線性化后的加載系統電液伺服閥的流量連續性方程為[11]:

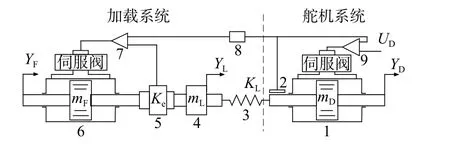
圖1 電液負載模擬器等效圖
式中:QLF——加載系統電液伺服閥的負載流量,
KqF——加載系統電液伺服閥的流量增益;
XvF——加載系統電液伺服閥閥芯的開口量;
KcF——加載系統電液伺服閥的流量—壓力系數;
PLF——加載系統加載液壓缸的負載壓力。
加載系統加載液壓缸的流量連續性方程如下式所示:

式中:AF——加載系統液壓缸活塞的有效面積;
YF——加載液壓缸活塞移動的位移;
CtcF——加載液壓缸總的泄漏系數;
VtF——加載液壓缸兩個容腔的總容積。
如果忽略庫侖摩擦作用和液壓油油液質量,根據牛頓第二定律,可以得到加載系統加載液壓缸的力平衡方程如下式所示:

式中:mF——加載液壓缸活塞和活塞桿所組成的組合件的質量;
BcF——加載液壓缸的粘性阻尼系數。
同時,電液負載模擬器系統檢測力傳感器的輸出力如下式所示:

其中Ke為檢測力傳感器的等效剛度。
由于在檢測測量環節,本項研究采用了大剛度的檢測力傳感裝置(器),從而可以大貼合率的近似實現YL=YF的實際效果,就可以在物理實際角度認為加載系統檢測力傳感器的輸出力即為加載液壓缸活塞桿的輸出驅動力,那么加載系統檢測力傳感器輸出力的傳遞函數可通過下式來求得:
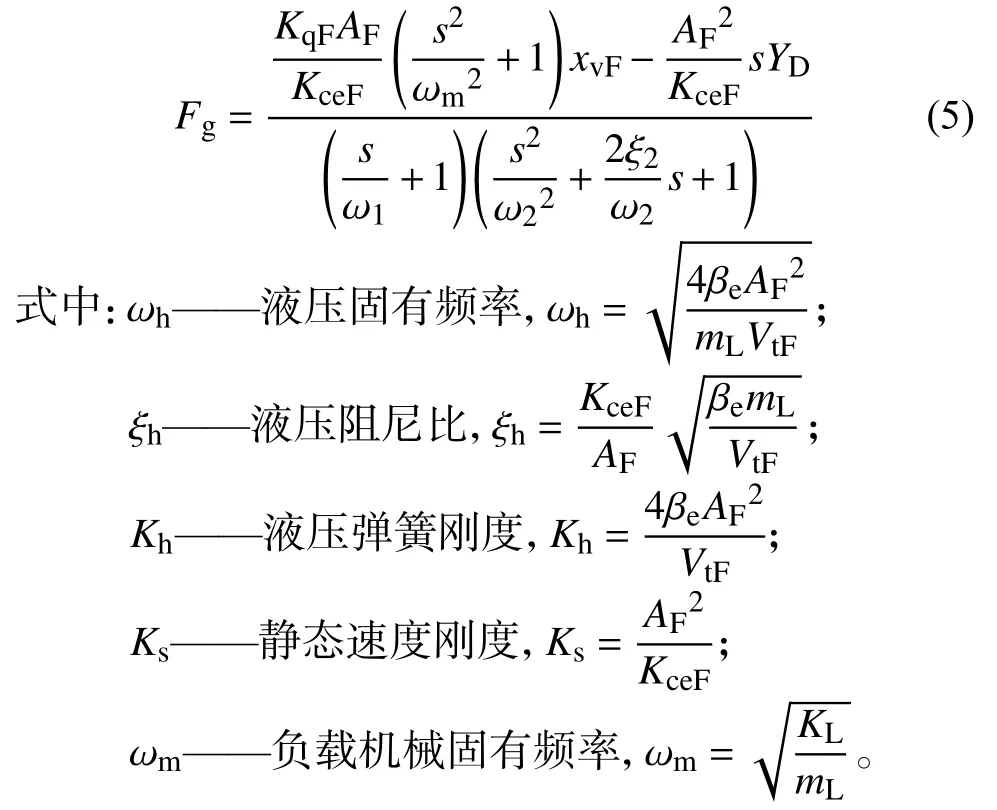
分析式(5)中的特征參數可知:加載系統中使用的液壓動力機構當中的一階慣性環節的轉折頻率是,同時,其中的二階振蕩環節的轉折頻率是以及二階振蕩環節的阻尼比。通過這些即可進一步求解分析加載系統的特性。
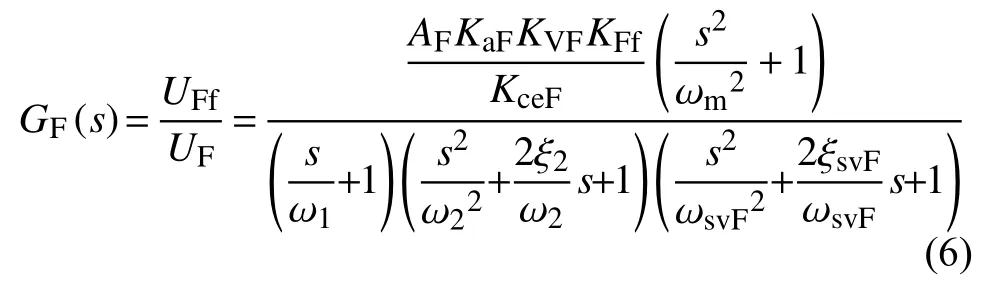
由于功率放大器和檢測力傳感器二者各自響應頻率都要比機械和液壓環節本身的頻率高得多,所以直接利用二者各自的簡化傳遞函數形式即可,再聯合電液伺服閥作為二階振蕩環節考慮時的傳遞函數和上述分析,就可以得到加載系統的開環傳遞函數,如下式所示:
2 最小均方算法神經網絡控制策略
論文中所采用的神經網絡控制策略的性能指標是均方誤差,該控制策略在結構上,主要是由自適應線性神經元網絡和最小均方算法的學習規則組成的。在最小均方算法的規則中,主要工作是通過算法改進之后,可以加快求解計算過程中的隨機梯度,進而經過逐次迭代不斷優化的方式,可以達到更高效調整自適應線性神經元網絡里的權值向量的目的。同時,重點是該迭代調整,可以在相對于被動態調整權值的誤差平方幅度的變化梯度的方向上來完成,所以其優勢就在于在上述過程中,并不需要像原先那樣做相關復雜又比較耗時的矩陣求解或矩陣逆運算[12],使得其具有相對簡單的結構、同時還具有高效的運算過程等特點,從而使其能夠在比較多的、不同的運行工況條件下,所展現出來的權值調整、運行效率、精度等綜合性能都比較優良,實際應用效果明顯。將這些優勢和特點應用在電液負載模擬器的加載系統控制策略設計上,就可以針對性解決加載系統在強干擾作用下、加載工況變化情況復雜時導致加載性能差的問題。
在神經網絡控制策略中,自適應線性神經元網絡所輸出向量的第i行元素如下式所示:

其中iwT為權值矩陣w的第i行元素,即下式所示:

當需要通過上述結構來構造一個神經網絡線性控制器時,可以采用的輸入信號向量如下式所示:

其中該神經網絡的權向量就可以由下式表示為:

則所設計的神經網絡線性控制器在n時刻的輸出可由下式表示為:

假設:d(n)為神經網絡線性控制器的期望響應輸出值,則該控制器的誤差e(n)可以用下式得到:

由式(7)~(12),結合上述分析過程,可以得到自適應線性神經元網絡控制器,其原理圖如圖2所示。
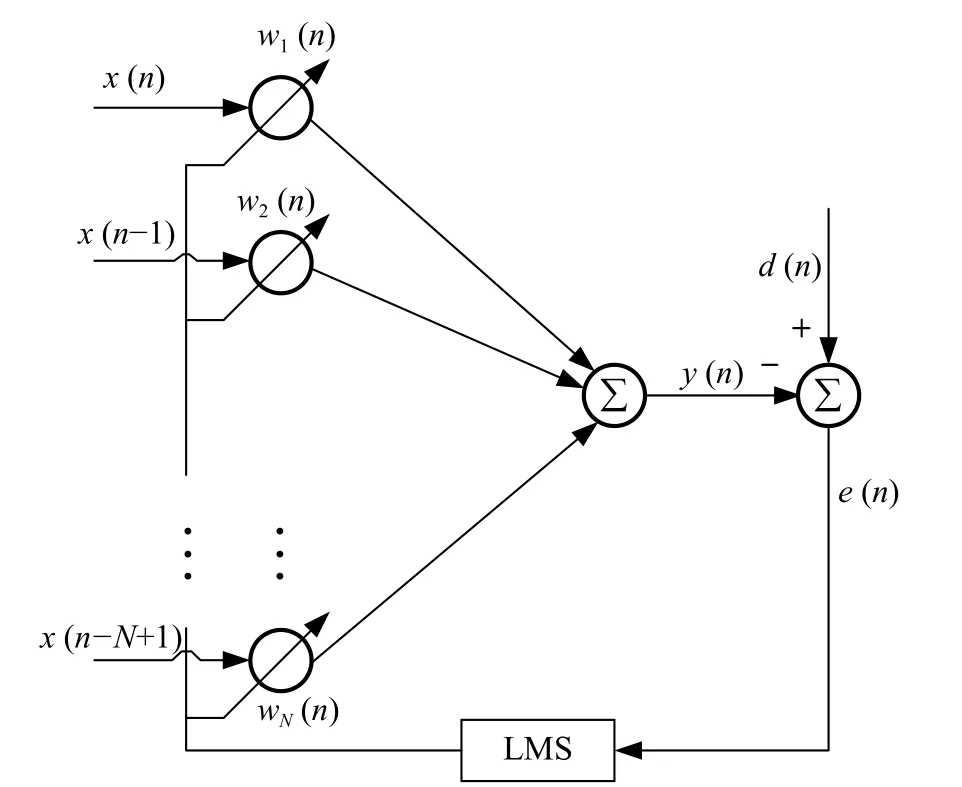
圖2 自適應線性神經網絡控制器原理圖
3 基于最小均方算法的加載系統神經網絡控制器的設計
電液負載模擬器在結構上尤其是聯接結構上是具有強相互耦合特點的較為復雜的機-電-液一體化程度高的復合系統[13]。模擬器里面的加載系統在對被加載對象動態加載的過程中,出現了不必要的多余力作為干擾力存在,對加載力的加載精度造成了很大的影響[14],而且通過分析得知多余力的表現,尤其是在正弦信號輸入下的特性,是輸出相位的超前和幅值的增大,甚至于在某些特殊工作的工況下,多余力比所需要的正常加載力高出很多甚至若干倍;在動態加載而且加載頻率比較高的工況下,更是特別嚴重[15]。為此,本論文在研究中,為電液負載模擬器的加載系統設計了一個基于最小均方算法的自適應線性神經網絡控制器,來提高加載系統在上述分析的干擾工況工作狀態下的動態綜合加載精度。
按照上一節的分析結果,結合加載系統的特點,我們可以把加載系統的輸入信號做數學變化后如下式所示:

接著再分別用權值w1和w2代替公式(13)中的余弦值和正弦值,則公式(13)變化后可表示為下式:

在此分析的基礎上,對于電液負載模擬器的加載系統而言,所設計的自適應線性神經網絡控制器的原理圖如圖3所示,則該控制器的輸入信號有兩個,分別為預先設定好的輸入信號u和另外一個輸入信號u′′,將兩個輸入值u和u′′分別與圖中各自相對應的加權值w1和w2相乘,再按照圖中所示算法規則進行運算之后,就可以得到綜合輸入信號。然后,再將綜合輸入信號作為加載系統的輸入信號。對于運算過程中的 φ值而言,應用自適應線性神經網絡而實現的u和u′′及其各自權值w1和w2之間的關系,并利用最小均方算法可以在線調整后得到算法運算所需要的加權值。接著再將整個自適應神經網絡策略的輸出誤差e作為最小均方算法的輸入值;這樣,應用該算法循環計算、并反復多次在線實時變化調整兩個加權值,由前述分析的、所設計的該算法規則運行原理可以得知,最終就可以用第n次循環迭代時的誤差平方值e2(n)來代替原有的均方誤差值,從而我們得到了所述自適應線性神經網絡的權值變化的算法為:

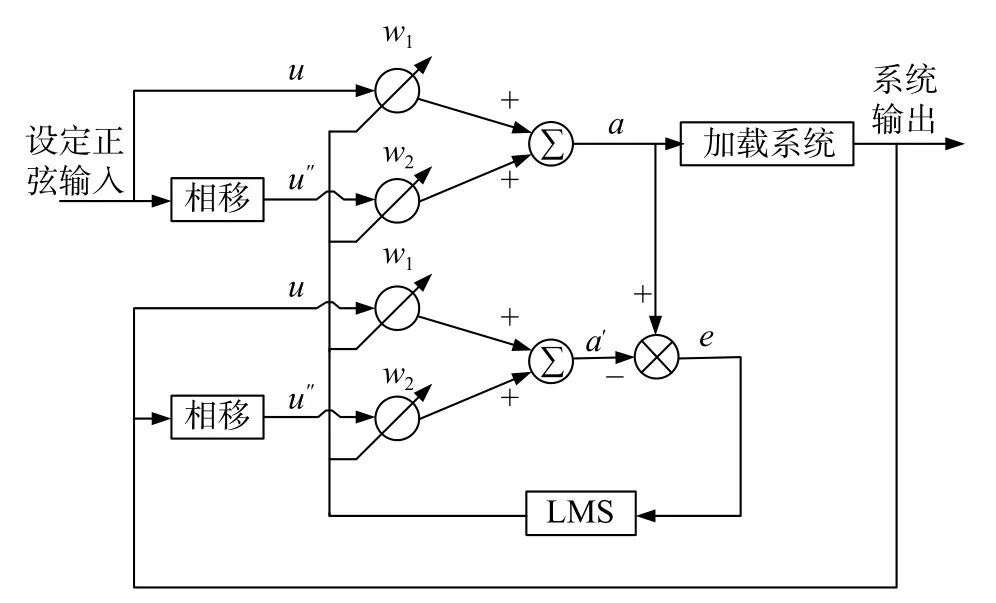
圖3 最小均方算法的神經網絡控制器原理圖
這樣,就在輸入信號和加載系統之間設計增加了一個基于新算法規則的最小均方算法自適應線性神經網絡控制器。
4 加載系統的仿真分析
下面對基于最小均方算法所設計的自適應線性神經網絡控制器來控制的電液負載模擬器加載系統動態力加載進行仿真分析,仿真結果曲線如圖4所示。其中,圖4(a)是沒有采用本論文中所設計的神經網絡控制器時加載系統的加載輸出力響應曲線,而圖4(b)是應用了基于最小均方算法設計的自適應線性神經網絡控制器之后的加載系統的加載輸出力響應曲線,如圖中所示,曲線1是所設定的輸入信號曲線,曲線2則是加載系統加載輸出力信號曲線。從圖中可以發現,在沒有應用神經網絡控制器時,加載系統在運行之后,其輸出可以對設定的輸入信號實施隨動跟蹤,但是調整結束并且穩定工作之后,加載誤差依然存在,而且相對來說還是比較大的;并且,明顯出現了輸出信號的幅值增大,相位超前的現象。在對加載系統應用了基于最小均方算法所設計的自適應線性神經網絡控制器之后,加載系統在初始階段也要經過一定周期的調整,并且可以看出調整的幅度或者說此時調整所出現的誤差比較大、調整過程顯得比未加控制器時的情況要劇烈一些,但其輸出也還是能對設定輸入信號進行跟隨復現的。不過,明顯看出整個調整的時間周期變短了,而且,當自適應調整結束以后,輸出信號和設定輸入信號之間的穩態誤差值明顯減小,二者趨于一致,從仿真結果來看,說明基于最小均方算法所設計的自適應線性神經網絡控制器可以有效地改善加載系統的動態力加載的動態響應特性。
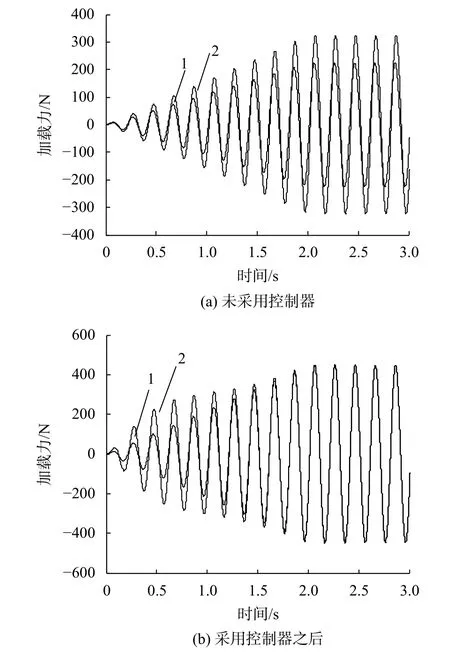
圖4 最小均方神經網絡控制下系統仿真響應
如圖5所示,在給定輸入信號的頻率為5 Hz時的正弦信號作用下,加載系統動態加載力輸出的響應仿真曲線,其中,圖5(a)是沒加本文所設計的控制器情況下系統的輸出仿真曲線,圖5(b)是采用了基于最小均方算法所設計的自適應線性神經網絡控制器之后系統的加載力輸出仿真曲線。圖5(a)和圖5(b)中的曲線1均為輸入信號曲線,曲線2均為加載系統的加載力輸出曲線。通過分析仿真結果可以看出,圖5(a)所顯示的加載系統的加載輸出精度是比較低的,其中明顯的具有相位超前和幅值增大的現象,而從圖5(b)顯示的仿真結果來看,調整的初始階段輸出信號的幅值增加的特別劇烈,加載系統的輸出響應性能比較差,力加載輸出曲線的幅值甚至比預設輸入信號的幅值高出1倍,相位也有明顯的超前。隨著自適應線性神經網絡控制策略調整的持續進行,力加載輸出曲線逐漸向輸入信號靠近,加載系統的響應性能明顯好轉并可以有效保持住。
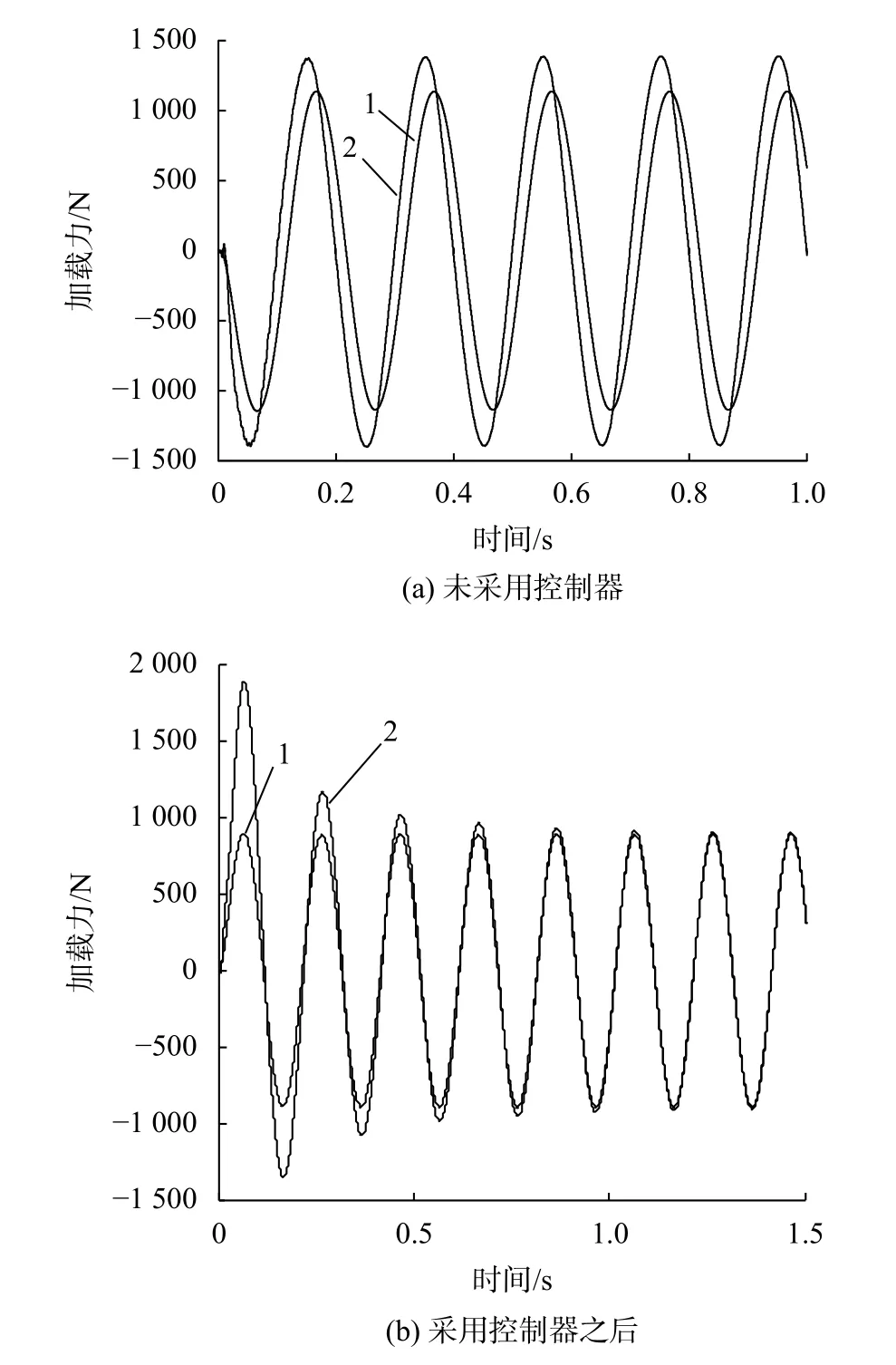
圖5 加載系統動態力加載時系統響應曲線
5 基于最小均方算法自適應線性神經網絡控制加載系統的實驗研究
在電液負載模擬器的加載系統采用了基于最小均方方法所設計的自適應線性神經網絡控制器之后,對其動態力加載性能進行實驗研究,實驗分別進行了采用神經網絡控制器之前與之后的加載系統動態力加載的性能對比研究,實驗曲線如圖6所示,圖中曲線1是給定的輸入信號曲線,曲線2是加載系統動態加載輸出力信號曲線。
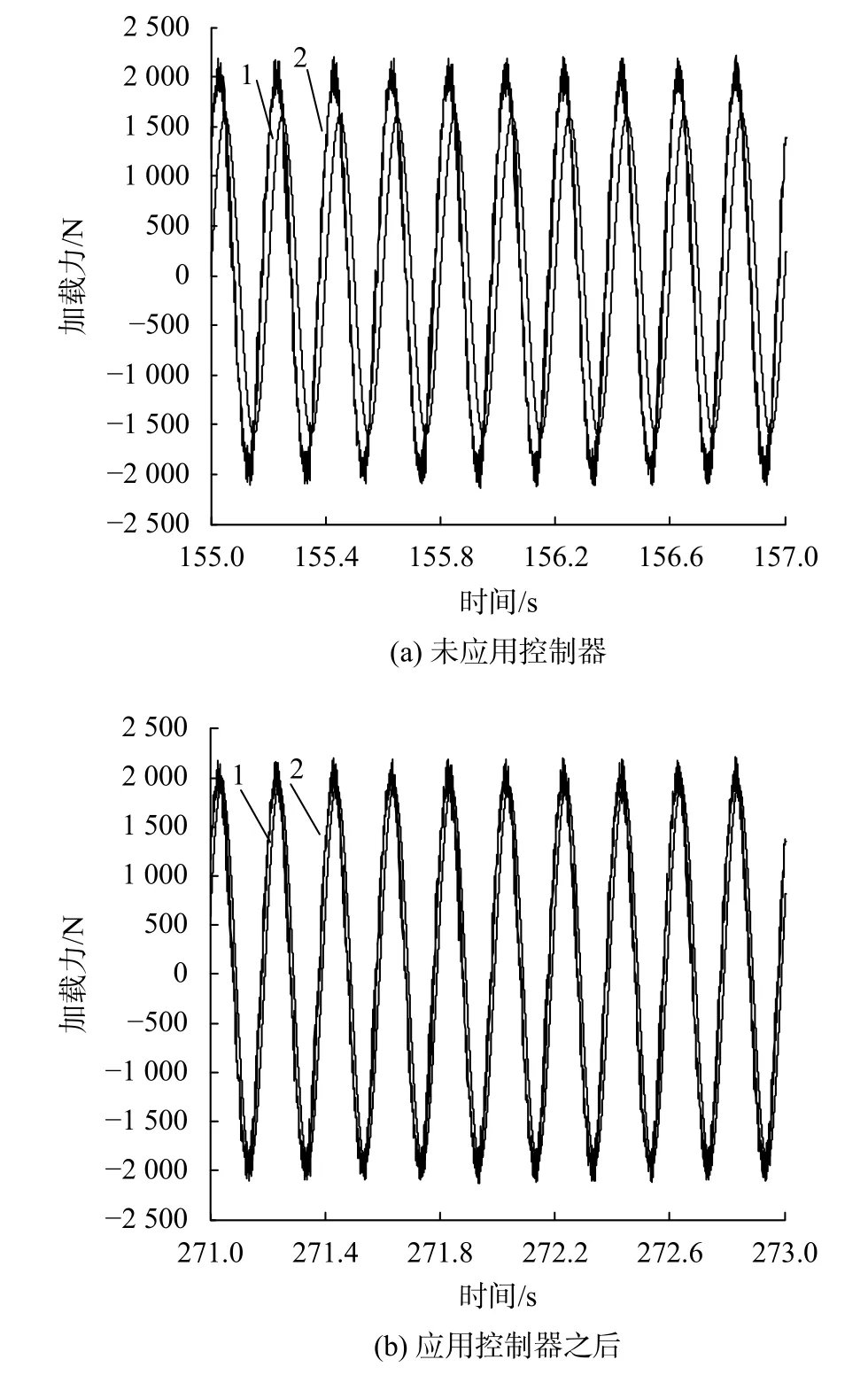
圖6 應用最小均方神經網絡控制器前后動態力加載實驗曲線
從圖6中可以看出,當加載系統進行動態力加載的時候,其力輸出在經過初始狀態較短時間的調整之后,就能夠較好地隨動跟蹤上設定的輸入信號,有效減弱了曲線中的幅值超高和相位超前的動態運行誤差。
其中,圖6(a)是沒有應用所設計的控制器進行控制情況下電液負載模擬器加載系統的動態力加載實驗曲線,圖6(b)是采用了基于最小均方算法所設計的自適應線性神經網絡控制器控制加載系統時的動態力加載實驗曲線,通過對比實驗曲線可以看出,圖6(a)中所顯示出來的幅值增大和相位超前問題,在圖6(b)中得到了很好的解決,加載輸出力曲線很好地復現了設定輸入信號曲線,說明基于最小均方算法的自適應線性神經網絡控制器有效地改善了加載系統動態力加載時的加載精度和具有較高加載頻率運行工況下的綜合動態響應特性。
6 結束語
本論文所研究的基于最小均方算法自適應線性神經網絡以及在此方法下所設計的控制器,主要是針對電液負載模擬器加載系統動態力加載時出現的加載精度低,動態加載快速性不高的問題。設計控制器的主要工作是通過算法改進之后,自適應線性神經元網絡單元和最小均方學習規則可以實現更高效地調整神經元網絡里的權值向量這一核心要素的目的。仿真和實驗結果表明:在應用文中所設計的控制器之后,加載系統的動態加載力輸出響應曲線能很好地隨動跟蹤所設定的輸入信號,并在較短初始調整階段結束以后能夠和設定輸入信號的幅值與相位趨于一致,實驗中較好地解決了輸出幅值超大、相位超前的實際問題,從而達到實現較為精確動態加載輸出力的目的。用該方法設計的控制器在工作過程中循環迭代時運算效率高,具有較強的實時性,綜合效果較好。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
