某海工船電力推進系統機槳匹配仿真研究
2021-04-23 03:18:54劉洪亮樂小龍吳志華
船電技術 2021年4期
劉洪亮,樂小龍,翁 爽,吳志華
應用研究
某海工船電力推進系統機槳匹配仿真研究
劉洪亮,樂小龍,翁 爽,吳志華
(上海船舶研究設計院,上海 201203)
電力推進系統在船舶的應用越來越廣泛,電力推進系統可適應工況復雜、綜合電站的工況需求,比較適合海洋工程船使用,目前海工船采用電力推進系統的方式也成為主流。某海工船采用電力推進系統進行船舶推進,其推進系統啟動到加速時間偏長,而修改電機轉速上升時間的時間越短,推進短時所需要的功率越大,導致電機短時承受的轉矩越大。本文介紹了該船電力推進系統,建立了該船舶的船機槳的模型,通過仿真,分析了啟動過程中船機槳的匹配性以及電力推進系統與操縱相關的參數的合理性。
電力推進系統 仿真 船機槳
0 引言
船舶電力推進系統是指采用電動機驅動螺旋槳推動船舶行進的推進系統。交流電力推進系統由柴油發電機組、配電系統、變頻驅動系統、推進器等構成。隨著電力電子技術的發展,電力推進系統在不同船型應用越來越廣泛[1]。
由于海洋工程船舶工況比較復雜,大部分具有DP的要求,因此其電站需要由多臺機組自由組合,根據用電負荷選擇投入運行的發電機組臺數,使運行機組始終運行于高效工作區,保持燃油消耗率最低,實現最大的經濟性,提高續航力,降低運行成本。同時船舶全船動力用電、生活用電、其他輔助用電均由統一的綜合電站提供,既滿足設備的冗余要求,也具有較好的電站儲備。
從原理上來講,由于推進電機的動態響應特性要優于傳統的推進柴油主機,因此電力推進船舶的操縱性能優于柴油機推進船舶,可以大大提高的船舶的機動性。某海工船采用交流電力推進系統,但在實際操作中,發現其啟動到加速至滿速的時間偏長,而提升電機轉速,上升時間越短,推進短時所需要的功率越大,導致電機短時承受的轉矩越大。因此需要建立船-機-槳的模型,通過仿真分析推進系統參數合理的匹配性。
1 某海工船電力推進系統簡介
本船設計為海洋工程船,采用的推進型式為全回轉舵槳,采用電力推進系統。主要船體參數如下:總長:79 m,型寬17.6 m,型深7.7 m,設計吃水6.5 m,設計航速14 kn,載重量3800 t。
主推進電機為鼠籠式水冷感應推進電動機,采用變頻驅動,額定功率為1500 kW,額定轉速約1000 rpm。齒輪箱減速比為4.76: 1,螺旋槳額定轉速約為210 rpm。
本船的電力推進系統單線圖如圖所示:

圖1 船舶電力推進系統單線圖
本船電力推進系統由3臺1550 kW/3AC690 V/50 Hz的發電機組和1臺600 kW/3AC690 V/50 Hz的停泊機組供電,推進系統由變頻器驅動推進電機,推進電機配套全回轉舵槳實現船舶的推進,并完成船舶的進出港、全速航行、經濟航行等工況。
2 電力推進系統及船機槳仿真模型
船機槳的仿真模型主要包括螺旋槳的模型、螺旋槳及電機的工作特性曲線匹配、螺旋槳的推力和轉矩模型,船舶阻力模型,變頻電機控制模型等[2]。
1)螺旋槳特征及特征曲線擬合
在本文中針對螺旋槳的特性仿真采用四象限螺旋槳特性的形式來進行擬合。將螺旋槳的工況分為四個象限,即第一象限(n > 0,vp > 0),第二象限(n < 0,vp > 0),第三象限(n < 0,vp < 0),第四象限(n > 0,vp < 0)。在n和vp不同時為零時,相應的定義如下[3]:

本文對該特性曲線做切比雪夫多項式擬合,結果如下式[4]:
螺旋槳轉矩

螺旋槳推力
2)船機槳系統運動模型
一般傳統的船舶的船機槳由推進柴油機、推進齒輪箱、推進螺旋槳構成。本船的船機槳由推進電動機、全回轉舵槳構成,其中全回轉舵槳包含了齒輪箱結構和推進螺旋槳,螺旋槳產生推力驅動船舶前進,在本文中,動力學方程采用以下模型[5]:
式中,dd為回轉部件的轉速變化率;為推進電動機的驅動力矩;f為螺旋槳水阻力矩;m為船體的總質量;dv/d為船舶航速的變化率。最終構建的仿真模型如圖2,3所示。
3 仿真結果及分析
本船作為海工船對操控的要求較高,在啟動過程中,如果時間過長,會導致操作的延時性,造成乘客的體驗感下降。而在推進系統的啟動過程中,根據電力推進系統驅動回路的特性,又有可能造成電機轉矩和功率過載。本項目中主推電機的額定功率為1500 kW,根據船規要求最多可考慮110%的過載能力。
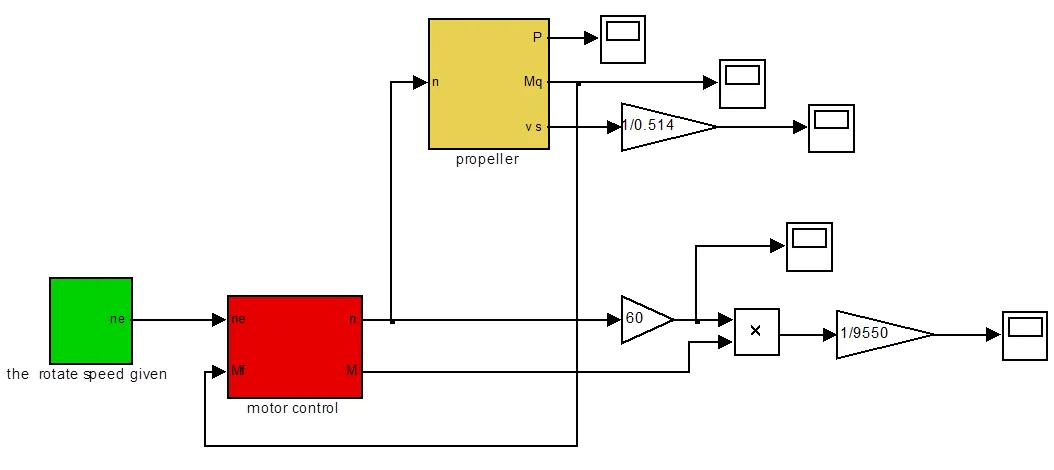
圖2 系統仿真模型
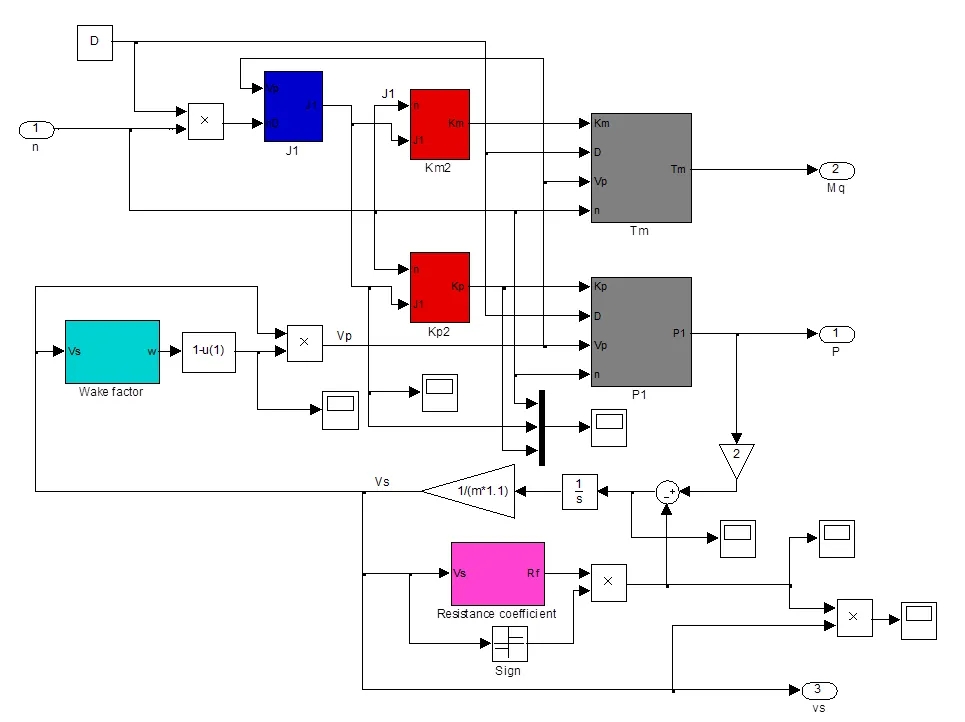
圖3 船槳仿真模型
工作模式如下:電機轉速由變頻器控制,按照固定上升或下降斜率調節電機的轉速。推進電機控制設置轉矩限幅和功率限制。
仿真中暫時按照啟動時間35 s進行仿真設計,即螺旋槳35 s內可從零轉速到額定滿轉速,仿真器的時間設定為1000 s。
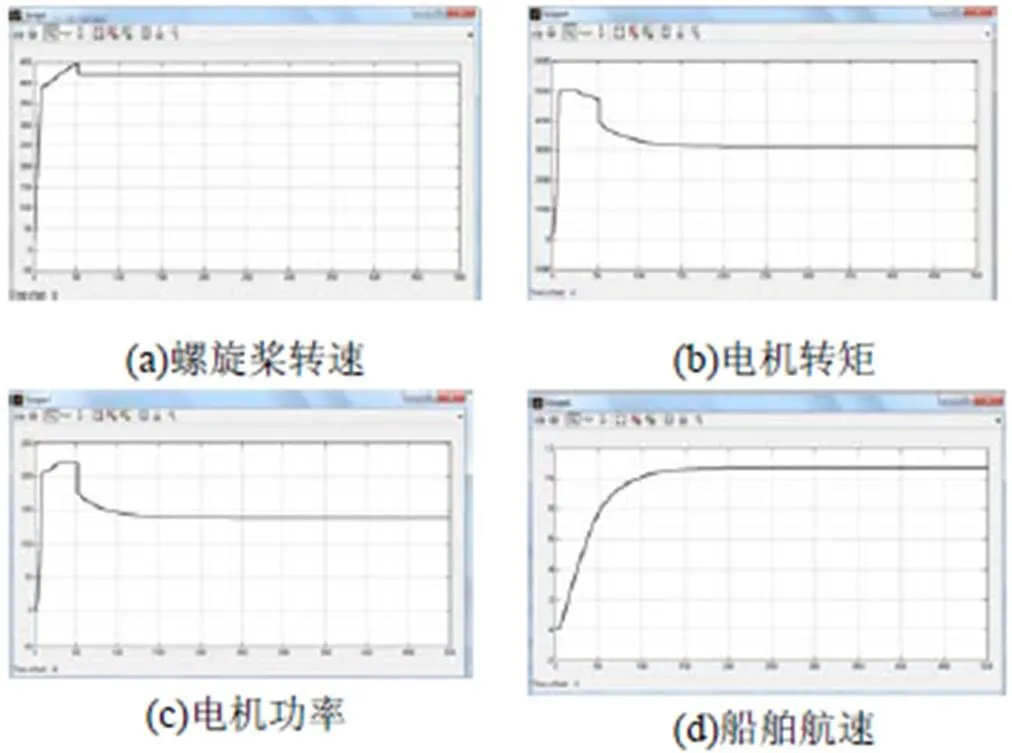
圖4 啟動情況下的仿真波形
該工況下仿真波形如圖所示,船舶穩定計算所得航速為14.4節,與本船設計航速基本相當。但由于在啟動過程中螺旋槳所需轉矩較大,而此時推進電機的轉矩和功率處于上升階段,轉矩和功率處于限制情況,因此電機轉速會出現超速的情況,最大轉速為222 rpm(超速6%)。從140 s開始,推進電機不再出現功率限制或者轉矩限制,原因是此時船舶航速到達一定的值,所需的螺旋槳轉矩有所降低,最終工況趨于平穩。
由前面分析可知,因啟動時可能會造成電機的轉速超調較大,且引起推進電機轉矩和功率限幅值限制,因此可改變推進電機調速參數,增大變頻驅動回路中的積分常數,其仿真結果如下:
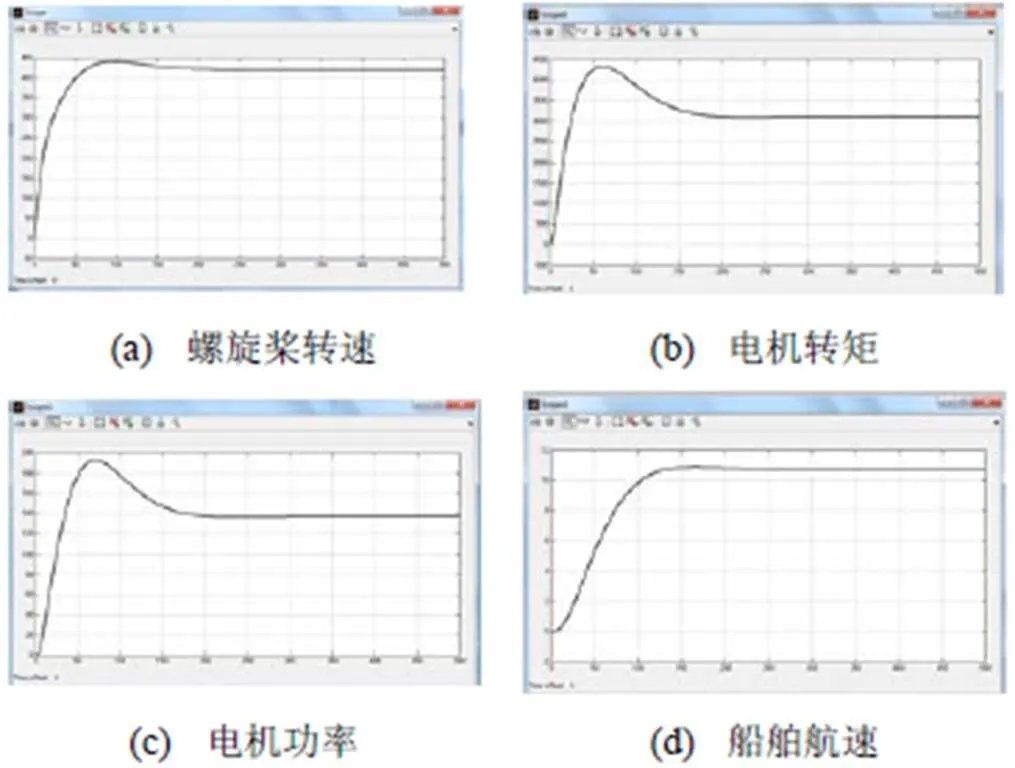
圖5 啟動情況下的仿真波形

圖6 啟動情況下的仿真波形
由仿真波形圖5可知,當增大速度控制環PI調節器的積分時間常數Ti后,速度超調減小,最大轉速為219 rpm(超速4.32%)。此時,推進電機均不出現轉矩和功率限幅的情況。但是螺旋槳到達額定轉速的時間加長,且航速增速變慢。螺旋槳轉速與實際給定轉速在啟動過程中偏差較大。因此積分時間常數較大的PI對啟動有較大影響,考慮到轉矩和功率限制問題,以下仿真均采用積分時間常數較大的PI控制參數。
在進行PI參數調節后,將啟動時間設定為船舶目標值的20 s,螺旋槳可從零轉速到額定滿轉速,仿真時間為1000 s。
由仿真波形圖6可知,此時在進行PI參數調節之后,其他速度控制參數保持不變的情況下,推進電機的轉矩和功率均未到達限幅值,且螺旋槳轉速、推進電機轉矩及功率、航速等均變化較小。因此在采用較大的PI調節參數,可有效改善電力推進系統啟動特性,滿足最終的設計目標。
5 小結
本文在MATLAB中仿真建立了電力推進系統的船機槳模型,在仿真模型中分析了啟動過程中船機槳的匹配性,分析結果顯示,當電機的啟動斜坡時間過大,變頻器PI參數未調節時,限制了電機的轉矩和功率,可能會出現電機超速的情況,而在增加變頻器的PI參數后,不會出現限制轉矩和功率的情況,可改善電力推進系統船舶的啟動特性。
[1] 高海波. 船舶電力推進系統的建模與仿真[D]. 武漢: 武漢理工大學, 2008.
[2] 胡倩. 電力推進船舶異步電機矢量控制研究[D]. 鎮江: 江蘇科技大學, 2015.
[3] 孫洪波. 螺旋槳逆轉工況下船舶運動建模與仿真 [D]. 大連: 大連海事大學, 2007.
[4] Li Dianpu,Wang Zongyi, Chi Haihong. Chebyshev Fitting Way and Error Analysis for Propeller Atlas across Four Quadrants[J]. Journal of Marine Science and Application, 2002(1):52-59.
[5] 冒如權. 電力推進船舶制動電阻設計研究[J]. 船電技術, 2016,8: 36-40.
Simulation Research on Working Condition Matching Charaterristic of Propulsion Motor and Propeller of the Electric Propulsion System for an Offshore Ship
Liu Hongliang, Yue Xiaolong, Weng Shuang, Wu Zhihua
(Shanghai Merchant Ship Design and Research Institute, Shanghai 201203, China)
U674.3
A
1003-4862(2021)04-0054-04
2020-09-28
劉洪亮(1985-),男,工程師。研究方向:船舶與海洋工程研究設計。E-mail: liuhongliangsdari@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
家庭影院技術(2017年9期)2017-09-26 03:41:45
