電子穩定控制系統中橫擺與側翻控制綜述
2021-04-26 14:19:47李少志趙飛鄧惜仁王煜
汽車科技 2021年2期
李少志 趙飛 鄧惜仁 王煜
摘? 要:電子穩定控制系統(以下簡稱穩定控制系統)是當下乘用車裝備較為普遍的主動安全控制系統,基礎的穩定控制系統主要監控車輛的橫擺,當目標橫擺與實際橫擺的差值的絕對值大于橫擺門限時系統激活,通過制動將車輛的橫擺控制在駕駛員可接受范圍內,從而修正車輛的過度和不足轉向。但對于靜態穩定系數較小、懸架調教偏向舒適性的SUV車輛,在極限工況下,基礎的系統僅能修正車輛橫擺但不能抑制側翻,因此需要增加防側翻功能。防側翻功能主要監控方向盤轉角的速率、橫向加速度的變化率、橫擺角速度變化率等。防側翻功能依據摩擦圓原理,通過增大輪胎與地面之間的縱向力來削弱橫向力,進而削弱橫向加速度,最終實現抑制車輛側翻。
關鍵詞:車身電子穩定控制系統;橫擺穩定性;防側翻功能;靜態穩定系數;摩擦圓
中圖分類號:U467.1+1? ? ?文獻標識碼:A? ? ?文章編號:1005-2550(2021)02-0096-08
Abstract: Electronic Stability Control System (hereinafter referred as ESC) is widely used in vehicle active safety control system, base ESC monitors vehicle s yaw rate. When the absolute value of the difference between target yaw rate and actual yaw rate exceed the threshold, yaw rate stability control active. Independently modifying the 4-wheels brake pressures to control the yaw rate within the driver acceptable range, amending over-steering and under-steering tendency. For vehicle with small SSF (Static Stability Factor) and soft suspension, base ESC can only amend yaw rate but without mitigate roll-over in critical dynamic situation. So RMI (Roll Movement Intervention) function needs added to lower the roll-over risk. RMI mainly monitoring steering wheel angle (hereinafter referred as SAS) gradient, lateral acceleration (hereinafter referred as Ay) gradient, yaw rate (hereinafter referred as YR) gradient, etc. RMI control logic is based on Kamm circle, by increasing longitudinal force (hereinafter referred as Fx) to decrease lateral force (hereinafter referred as Fy), then decrease Ay, finally mitigate the roll angle and lower the roll-over risk.
Key Words: Electronic Stability Control; Yaw Rate Stability; Roll Movement Intervention; static Stability Factor; Kamm Circle
前? ? 言
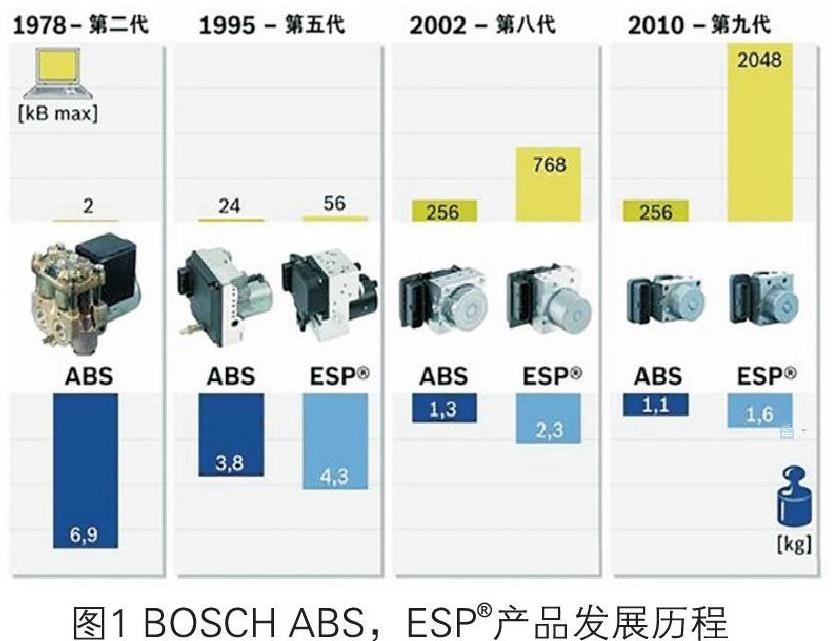
在濕滑的道路行使時,如果遇到突發情況需要進行緊急避讓,在ESP?問世之前,普通駕駛員往往很難在如此工況下保證車輛的行使穩定性,通常車輛會失控沖出鋪裝路面翻到溝里或不可避免地撞上障礙物,同時帶來嚴重的人身傷亡[2]。但25年前,一項開創性的發明帶來了突破性的解決方案——博世和戴姆勒-奔馳于1995年首次在奔馳S級車輛上裝備了車身電子穩定控制程序ESP?[8],如圖1中第五代產品所示。從此,即使在極端情況下,裝備ESP?的車輛也可以安全穩定地維持在駕駛員所期望的行駛軌跡里[29]。
博世底盤控制系統中國區于2002開始在中國進行防抱死制動系統(Anti-lock Brake System, 以下簡稱ABS)的銷售和工程匹配,緊接著2003年,在蘇州啟動新的ABS生產線,實現本土化生產。2005年,博世蘇州開始順利進行ABS 8.0,ESP? 8.0的本土化生產[31]。2011年博世將第九代ESP?投入中國市場,ESP?9.0是模塊化設計,和ABS 9.0使用同一套軟件。截止當前,博世底盤控制系統中國區的絕大多數項目都已經采用ESP?9.3,只有極少數global客戶還采用ESP?9.2,如德國大眾汽車在國內合資車企的部分項目。
針對ESC,歐美國家有明確的法規要求,如FMVSS126,ECE R13-H均有要求車輛通過正弦停滯試驗以及NHTSA (National Highway Transportation Safety Administration) 的“魚鉤試驗”等。而防側翻功能 (Roll Movement Intervention, RMI) 的設計主要針對底盤懸架調教較軟,高質心、SSF<1.25的SUV、皮卡、廂式貨車、面包車等。
1? ? 國內關于ESC的研究情況
在國內,重慶理工大學的歐健教授在傳統汽車穩定性控制系統的基礎上,通過對底盤制動與懸架系統的集成控制研究,來提高各工況下的汽車穩定性和安全性。對于橫擺穩定性,通過四輪獨立制動直接控制橫擺;對于側傾穩定性,分別制定了制動和懸架系統側傾控制策略,結合傳統的穩定性控制系統,建立了包含制動與懸架底盤子系統的集成控制策略[1]。吉林大學宋傳學教授以研究汽車底盤系統子系統及其與其他子系統的集成控制為目的,通過研究ESC的工作原理,定義了相關控制參數,并參照其它成熟的產品開發經驗,設計了ESC的控制策略,重點研究了ESC與ABS系統共同作用時的耦合沖突問題。根據這一情況設計了協調控制器,通過仿真實驗對協調控制器在多種工況下的控制性能進行了分析,為深入研究底盤系統集成協調控制提供了參考[3]。清華大學宋健教授對于系統的控制策略和液壓閥的特性進行了深入研究,并搭建了試驗臺對系統特性進行了探索研究[16][17]。上海交通大學通過直接橫擺力矩與四輪轉向集成控制研究,針對在實際應用中車輛的側向速度難以直接測得的問題,以車輛動力學和運動學為基礎,采用卡爾曼濾波方法,建立了一個車輛質心側向速度觀測器并進行了研究。關于輪胎建模部分,綜合考慮了輪胎模型在設計過程中對精度和復雜程度的要求,利用CarSim的虛擬輪胎試驗,建立了能夠反映輪胎非線性特性且形式簡潔的Burckhardt輪胎模型[22]。
2? ? RMI的裝備必要性
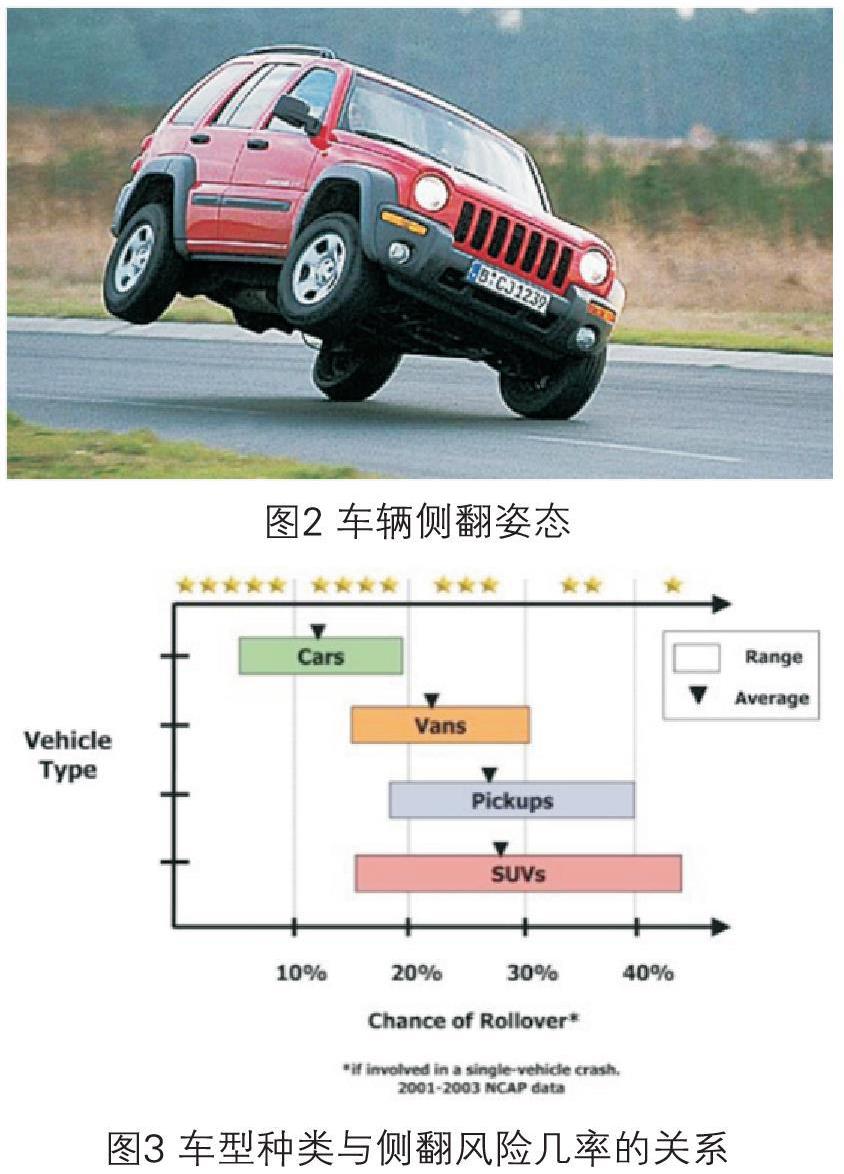
實際工程項目開發中配備橫擺穩定性控制的車輛經常出現過度轉向不太嚴重,但是側傾較大,以至于使得內側車輪離地、外側車輪輪胎脫圈,更嚴重時甚至會出現車輛側翻,如圖2所示。
根據圖3中NHTSA的2001~2003年期間的NCAP (New Car Assessment Program)數據顯示,相較于SFF數值較大的轎車車型,SUV、皮卡、廂式貨車等車型的側翻風險更高。尤其是SUV,由于車型尺寸樣式豐富、使用場景更加復雜使得懸架調教風格更加多元化,所以SUV的側翻概率值更寬泛、概率的平均值也較其他車型更大一些。
3? ? 汽車橫擺與側翻穩定性的控制原理
3.1? ?汽車橫擺穩定性的控制原理
汽車橫擺穩定性控制即傳統的基于橫擺角速度的ESC控制。ESC通過實際橫擺YRact (Actual Yaw Rate)和目標橫擺YRtar (Target Yaw Rate)之間的差值dYR (Yaw Rate Deviation)的絕對值|dYR|與系統設定的橫擺角速度門限值YRthd (Yaw Rate Threshold)進行比較,當|dYR|>YRthd時,ESC激活。
博世的ESP?采用四輪獨立制動控制,即差動制動控制的作用原理[4]。ESC系統根據輪速傳感器信號來獲得車輛當前的行駛狀態,根據方向盤轉角傳感器信號來獲得駕駛員的行駛意圖,結合二輪車車輛模型估算出目標橫擺角速度。再通過慣性傳感器來獲得當前車輛的實際橫擺角速度以及橫向加速度。通過比較|YRtar|與|YRact|的大小來判斷出車輛當前是過度轉向還是不足轉向趨勢,當|YRtar|<|YRact|時,車輛有過度轉向趨勢;反之,為不足轉向。
當|dYR|大于系統設定的過度轉向干預進入門限值YRthd_OSact (Over-Steering Act Threshold)時請求ESC過度轉向干預激活;當|dYR|小于系統設定的過度轉向干預退出門限值YRthd_OSsht (Over-Steering Shutdown Threshold)時請求ESC過度轉向干預退出,如圖4所示:
如圖5所示,將|dYR|作為PID控制的輸入量即控制偏差量[12][24],計算出修正當前車輛過度轉向或不足轉向姿態需要的整車橫擺修正扭矩dMz,再將dMz分配到車輛的前、后軸上,分別為dMz_FA, dMz_RA。在輪胎模型的線性區域內,系統會將將dMz_xA (x=F, R)轉化為相應車輪上的輪端制動力矩Mb,再根據基礎制動器的制動效能,通過公式(1)計算出所需的液壓壓強,最終輸出給液壓模型執行。
式中:p為液壓壓強;Mb為輪端制動力矩;
Cp為制動輪缸里的1bar液壓所能在制動器上產生的制動力矩大小,通過實車單軸制動測試得到,前、后軸制動器分別對應一個參數值。
在輪胎模型的非線性區域內,通過輪胎模型反推在當前請求的dMz_xA目標橫擺扭矩下,輪端所需要產生的目標滑移率。計算出目標滑移率之后,系統進入制動滑移率控制(Brake Slip Control, 以下簡稱BSC),BSC請求液壓單元主動增壓產生制動力,以PID控制的方式使得實際滑移率較好的跟隨目標滑移率。
如圖6,7,8,9所示,橫坐標為車輪的滑移率,縱坐標為不同滑移率下輪胎所受縱、橫向力分別產生的繞Z軸的橫擺扭矩以及橫擺扭矩之和。其中MzFx為縱向力Fx產生的繞Z軸的橫擺扭矩,MzFy為橫向力Fy產生的繞Z軸的橫擺扭矩,Mzges為MzFx與MzFy兩者之和。dMz表示,相較于車輪上不受制動力矩即滑移率λ=0時前輪的Mzges初始值為6000Nm,后輪的Mzges初始值為-6000Nm,當ESC對某個輪缸主動增壓時,Mb使得車輪產生一定的滑移率,在不同滑移率下該車輪對整車產生的總橫擺扭矩Mzges的變化量,如下式:
dMz?0表征反向抵消當前車輛的橫擺偏轉姿態,即當車輛出現過度轉向時ESC通過PID控制計算出的當前所需要的目標橫擺扭矩差值;dMz?0表征正向加劇當前車輛的橫擺偏轉姿態,即當車輛出現不足轉向時ESC通過PID控制計算出的當前所需要的目標橫擺扭矩差值。
如圖10所示,車輛左轉彎行駛,滑移率λ=0時縱坐標Mz的正值代表與車輛轉彎方向一致的橫擺扭矩,Mz的負值代表與車輛轉彎方向相反的橫擺扭矩。當前、后輪提供的車輛總的橫擺扭矩超出駕駛員左轉彎期望時,駕駛員可以察覺到過度轉向趨勢,即車輛存在逆時針旋轉的風險。當滿足上述的ESC過度轉向干預條件后,ESC激活,通過對外(右)側兩個車輪主動增壓施加制動力FbxR (x=F, R),外側兩個車輪滑移率增大,即Mzges減小,dMz?0,反向抵消當前車輛的橫擺偏轉姿態。
如圖7所示,外側前輪的Mzges為單調遞減,理論上允許充分利用縱向附著力,但根據摩擦圓原理,縱向力增大會使得側向力減小,從而使得車輛前輪轉向跟隨性能下降。并且前輪上較大的制動力經過轉向系統傳導后,駕駛員在方向盤上可以明顯感覺得到。正常外側前輪的滑移率上限設置為60%,實際滑移率超過設定的滑移率上限后系統會自動減壓,直到實際滑移率恢復到目標滑移率或低于滑移率上限值。個別車型在極端工況,例如正弦停滯試驗中有車輪離地以及側翻風險,但沒有配備RMI功能,可以適當提高滑移率上限,允許利用更多的縱向力來盡可能快的降低車速。
如圖9所示,外側后輪的Mzges為先單調遞減后單調遞增,所以我們只利用它單調遞減對應的滑移率區間。當存在輕微過度轉向且系統計算的目標橫擺扭矩較小時,為了避免駕駛員可以敏感的察覺到前輪上的制動,優先考慮給外側后輪主動增壓,當干預后輪不足以修正過度轉向時,才將橫擺扭矩分配到前輪,依靠前輪制動器較大的CP值,以較小的需液量、較低的馬達轉速泵液即可將車輛姿態修正。
圖10中的Fsxx (xx=FL, FR, RL, RR)為轉彎時輪胎所受的側向力,FrxR (x=F, R)為外(右)側兩個車輪所受的合力,通過改變合力的方向也可以幫助車輛產生反向的橫擺扭矩,達到修正車輛過度轉向的姿態。
3.2? ?汽車側翻穩定性的控制原理
汽車側翻穩定性控制即RMI防側翻功能。RMI防側翻功能主要監控駕駛員方向盤轉角的輸入速率、橫向加速度的變化情況、橫擺角速度變化率、橫向加速度與方向盤轉角、橫擺、橫擺變化率的方向一致性等,當上述監控條件滿足相關判斷邏輯時,防側翻功能激活。防側翻控制功能主要是基于橫向加速度、橫向加速度變化率以及車速等計算Mb。根據摩擦圓原理,通過增大輪胎與地面之間的縱向力來削弱橫向力,進而削弱橫向加速度,最終實現抑制車輛側傾、降低側翻風險。
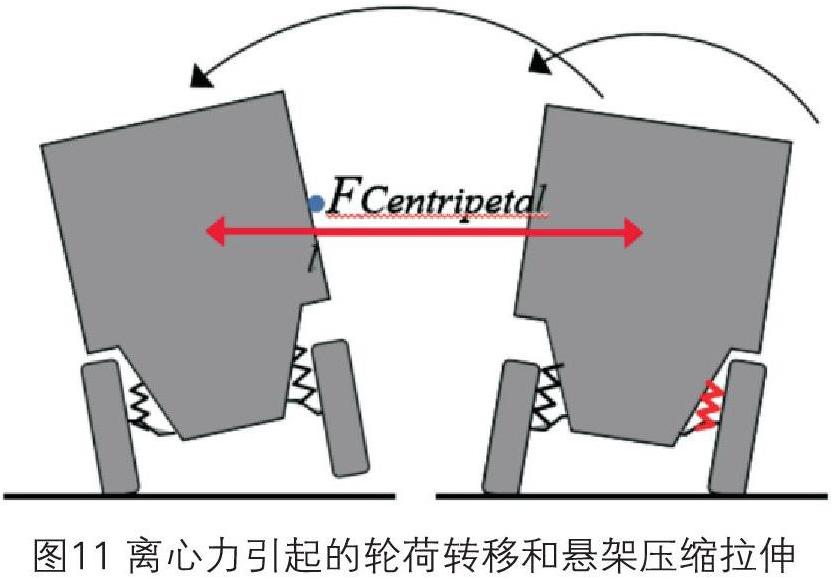
汽車側傾運動包括兩個階段:前一階段為懸架的側傾運動;后一階段為車輪離開地面的側翻運動[21]。如圖11所示,汽車在突發緊急避讓變道、J-Turn高速轉向等工況下行駛時,由于慣性力的作用,車輛簧載質量會繞側傾軸線,即車輛行駛方向X軸轉動,從而引起內外側車輪上的垂直載荷發生轉移,即輪荷轉移。隨著簧載質量轉移,內側車輪的輪荷會減小,外側車輪的輪荷會增加。簧載質量在內外側車輪上的重新分配,使外側懸架的彈簧和減震器受力壓縮,內側懸架的減震器受力拉伸[15],就會出現內側輪離地、外側輪輪胎脫圈的現象,嚴重時車輛會發生側翻。根據式(3),
式中:FCentripetal為汽車的離心力;m為汽車質量;Ay為汽車的橫向加速度;
如果汽車的離心力FCentripetal繼續增大,側向加速度也會繼續增大。但根據式(4),
汽車的橫向加速度Ay的最大值又取決于輪胎與地面之間的最大側向附著力Fy,所以通過摩擦圓原理,在系統激活RMI功能后,通過給對應輪缸持續施加可調節的制動力,增大縱向附著力Fx的同時來減小側向附著力Fy,從而達到抑制Ay的變大趨勢,將Ay和車輛橫擺控制在駕駛員可接受范圍內,減小車輛側翻的趨勢和風險同時保證車輛的橫擺穩定性。
4? ? 橫擺與側翻穩定性控制的異同點
4.1? ?橫擺與側翻穩定性控制的相同點
ESC中的橫擺與側翻穩定性控制在功能實現上都是通過液壓單元中的馬達驅動泵對指定的制動輪缸進行主動增壓,根據摩擦圓原理將輪胎的縱向力與側向力控制在當前所需要的一個最佳狀態,因此橫擺與側翻穩定性控制都可抑制車輛橫擺。由于輪胎的縱向力與側向力是無法實時測量的,所以需要引入輪胎模型,將力、力矩和扭矩轉化為輪上的滑移率,一個可計算、測量的信號,提供給ESC標定工程師參考。工程人員通過結合實車性能表現與主觀感受,以及客戶需求對制動干預量進行精細化標定。制動干預的客觀表現就是使得車輪維持在一個最佳滑移率,從而保證車輛的橫擺與側翻穩定性。與橫擺穩定性控制的過度轉向干預激活和退出門限相似,側翻穩定性控制同樣需要設定激活和退出門限。
4.2? ?橫擺與側翻穩定性控制的不同點
ESC中的橫擺穩定性控制是監測車輛的橫擺角速度,通過比較|YRtar|與|YRact|的大小來判斷當前車輛是過度轉向還是不足轉向趨勢。當|dYR|?YRthd_OSact時ESC的過度轉向干預激活,當|dYR|?YRthd_OSsht時ESC的過度轉向干預退出。相較于過度轉向會使得車輪失控側滑、甩尾以至于側翻,不足轉向通常表現為車輛的轉向響應跟不上駕駛員的期望。
并且很多車輛在底盤設計開發時會使車輛略微偏向于不足轉向,允許駕駛員通過追加方向或者采取制動減速來削弱不足轉向。所以在低附著路面上快速轉動方向盤容易出現不足轉向,在高附著路面上在較高車速情況下快速轉動方向盤同樣會出現不足轉向。因此ESC的不足轉向干預同樣設定有進入門限值YRthd_USact,但監控對象和條件相較于過度轉向主要監控控制偏差|dYR|_OS更為復雜,退出邏輯也更為復雜,在此不做過多介紹。由于過度轉向比不足轉向更加危險且駕駛員更難控制,所以ESC過度轉向干預的優先級是高于不足轉向的,因此過度轉向干預激活過程中,哪怕不足轉向控制偏差|dYR|_US達到進入門限值YRthd_USact,不足轉向干預也不會激活。
ESC中的側翻穩定性控制主要監控駕駛員方向盤轉角的輸入速率、橫向加速度的變化情況、橫擺角速度變化率等。所以相較橫擺穩定性控制通過監控|dYR|,RMI的干預激活會更早,退出也更晚,總體表現為干預持續,車輛減速更明顯。通常情況下,低附著路面上由于側向附著力比較低,車輛不會產生很大的Ay所以RMI功能不會激活。在高附著路面上,RMI激活后主要基于橫向加速度、橫向加速度變化率以及車速等計算輪端的目標制動力矩Mb,通過增大縱向附著力Fx來達到減小側向附著力Fy,從而達到抑制橫向加速度Ay,減小車輛側翻的風險。
5? ? 橫擺與側翻穩定性控制存在的問題以及工程項目中的標定思路
根據橫擺與側翻穩定性的控制原理,工程項目實踐中經常出現橫擺控制與RMI同時激活的情況,這時候可能如果將兩者計算的干預量直接輸出必然會存在制動耦合沖突,所以在將制動請求輸出到液壓單元執行之前需要對兩者進行仲裁。當前博世ESP? 9.3的內部邏輯允許在RMI和橫擺穩定性控制兩者的制動干預請求中取較大值,即當橫擺穩定性控制的過度轉向或不足轉向與RMI同時激活時,系統將當前時刻兩個功能對同一制動輪缸計算出來的目標制動干預量的大值發送給液壓單元執行。另外,還可以選擇RMI的目標制動干預量優先的方式,即在RMI激活時,盡管橫擺穩定性控制的過度轉向或不足轉向激活,系統仍只取用RMI的目標制動干預量,并發送給液壓單元執行。
實際ESC系統試驗標定過程中,不僅需要在低附著路面上設定橫擺穩定性控制的過度轉向和不足轉向的激活與退出門限、制動干預量,高附著路面上同樣需要設定門限和制動干預量。盡管側翻穩定性控制在低附著路面上不滿足激活條件,但高附著路面上如何平衡設定的門限和制動干預量與橫擺穩定性控制尤其是過度轉向干預的時機和干預量顯得尤為重要。若采用RMI和橫擺穩定性控制兩者取較大值的控制方式,就需要平衡橫擺控制的門限值與RMI控制的干預時機、狀態機切換,同時還要平衡橫擺控制中PID計算出的制動干預量與RMI在每個狀態機下對應輸出的制動干預量,既要考慮車輛穩定性,還要考慮制動干預的平順性與舒適性。若采用RMI的目標制動干預量優先的控制方式,就需要對RMI的干預時機、狀態機切換以及目標制動干預量進行精細化標定調試,以滿足各種工況下僅靠RMI干預即可保證車輛的穩定性與操縱平順性。
由于RMI的監控條件比較多,尤其是方向盤轉角的速率和橫向加速度的變化率。針對方向盤轉角速率判斷條件,需要在不同車速下進行恒定方向盤轉角速率的Slalom蛇形繞樁測試以及方向盤轉角速率變化的Slalom蛇形繞樁測試,來設定合適的方向盤轉角速率門限。針對橫向加速度變化率判斷條件,需要在不同車速下進行J-Turn彎道行駛以及Double Step Steering雙階躍的轉向輸入,來設定合適的橫向加速度門限。
6? ? 結論
(1)通過回顧ABS和ESP?的發展歷程總結出汽車工程技術創新固然十分重要,但如何將新技術新產品應用到廉價的普通車型上,讓更多國家和地區的人們享用到更安全的汽車。這不僅需要企業的責任和擔當,更需要全行業的共識,而法規和行業標準就是最好的驅動力。從第一件ESC產品的中國本土化生產,歷經15年的發展,目前ESC已經成為中國市場絕大多數乘用車的標配,守護著每一位駕乘人員的安全。
(2)當前市場上成熟的ESC產品均分別有橫擺與側翻穩定性兩種控制邏輯,如BOSCH公司的車輛動態控制 (Vehicle Dynamic Control, VDC) 即基于車輛橫擺的控制,防側翻控制RMI即基于車輛橫向加速度的控制;ZF-TRW公司的主動橫擺控制 (Active Yaw Control, AYC) 也是基于車輛橫擺的控制,主動側傾控制(Active Roll Control, ARC) 即基于車輛側傾的控制。
(3)簡單介紹了汽車橫擺與側翻穩定性的控制原理,分析了兩者的異同點,總結了在兩者同時激活時如何選擇制動干預量的輸出,以及在工程項目實踐中如何更好的利用ESC系統的控制邏輯,靈活恰當地設定橫擺穩定性控制的激活門限值以及側翻穩定性控制的介入時機和狀態機切換,使得車輛在保證穩定性的同時兼備更好的轉向操縱性和駕駛舒適性。
參考文獻:
[1]程相川. 基于制動與懸架系統的車輛穩定性集成控制方法研究[D].重慶:重慶理工大學,2014.
[2]金楊. 基于AFS和DYC的電動汽車主動安全控制策略研究[D]. 鎮江:江蘇大學,2018.
[3]龍少雄. 汽車ESP控制策略及基于ESP/ABS集成控制研究[D]. 長春:吉林大學,2014.
[4]郭孔輝,丁海濤. 輪胎附著極限下差動制動對汽車橫擺力矩的影響[J]. 汽車工程,2002,24 (02): 101-104.
[5]王德平,郭孔輝,宗長富. 車輛動力學穩定性控制的理論研究[J]. 汽車工程,2000,22 (01): 7-9.
[6]張舒. 汽車電子穩定程序控制系統性能測試方法研究[J]. 質量與標準化,2012,07: 47-50.
[7]郭健. 汽車穩定性控制系統控制策略與評價方法研究[D]. 長春:吉林大學,2011.
[8]楊絮. 博世安全技術--ESP產品系列[J]. 世界汽車,2008,07.
[9]王德平,郭孔輝,宗長富. 車輛動力學穩定性控制的仿真研究[J]. 汽車技術,1999 (02),8-10.
[10]KOIBUCHI K, YAMAMOTO M, FUKADA Y, et al. Vehicle stability control in limit cornering by active brake: 1996 SAE International Congress and Exposition: technical paper[R], 1996: 163-173.
[11]陸丹. 基于卡爾曼濾波的汽車行駛姿態的研究[D]. 鎮江:江蘇大學,2005.
[12]李靜,徐斌,張英鋒,等. 車輛電子穩定性程序神經網絡PID控 制算法[J]. 吉林大學學報:工學版,2007,37 (4):741-744.
[13]盛勇鑫. 轎車側向穩定性控制算法研究[D]. 長春:吉林大學,2008.
[14]余志生. 汽車理論(第6版)[M]. 北京:機械工業出版社,2019.
[15]郭孔輝. 汽車操縱動力學原理[M]. 南京:江蘇科學技術出版社,2011-2.
[16]李亮,宋健,于良耀. 汽車動力學穩定性控制系統仿真平臺研究[J]. 系統仿真學報,2007,19 (7):1597-1600.
[17]王會義,宋健. 汽車電子穩定程序的控制算法[J]. 清華大學學報:自然科學版,2007,47 (2):224-227.
[18]SELBY M A. Intelligent vehicle motion control[D]. University of Leeds, 2003.
[19]BEST M C, Gordon T J, Dixon P J. An Extended Adaptive Kalman Filter for Real-time State Estimation of Vehicle Handling Dynamics[J]. Vehicle System Dynamics, 2000, 34 (1): 57-75.
[20]SHIBAHATA Y, SHIMADA K, TOMARI T. Improvement of Vehicle Maneuverability by Direct Yaw Moment Control[J]. Vehicle System Dynamics, 1993, 22 (5-6): 465-481.
[21]高曉杰,余卓平,張立軍. 基于車輛狀態識別的AFS與ESP協調控制研究[J]. 汽車工程,2007,29(4): 283-291.
[22]杜尚謙. 直接橫擺力矩與四輪轉向集成控制研究[D]. 上海:上海交通大學,2009.
[23]黃友銳,曲立國. PID控制器參數整定與實現[M]. 北京:科學出版社,2010.
[24] Baffet G, Charara A, Lechner D. Estimation of Vehicle Side Slip, Tire Force and Wheel Cornering Stiffness[J]. Control Engineering Practice, 2009, 17(11):1255-1264.
[25]鄭香美,高興旺,趙志忠. 基于“魔術公式”的輪胎動力學仿真分析[J]. 機械與電子,2012 (9): 16-20.
[26]王露,朱永強,張平霞. 直接橫擺力矩控制車輛穩定性研究概述[J]. 專用汽車,2011 (9): 56-58.
[27]姚國成. 汽車穩定性控制策略的仿真研究[D]. 長春:吉林大學,2008.
[28]VAN ZANTEN, ANTON T. Bosch ESP Systems: 5 Years of Experience. No. 2000-01-1633. SAE Technical Paper, 2000.
[29]雅坤. 駕駛者的保護神 THE 9th GENER ATION OF BOSCH ABS/ESP[J]. 世界汽車,2010,04.
[30]HE Junjie. Integrated Vehicle Dynamics Control Using Active Steering, Driveline and Braking[D]. University of Leeds, 2005.
[31]楊絮. 博世ESP系統的市場發展[J]. 世界汽車,2008,08.