多網融合的列車運行控制系統研究*
2021-04-27 08:26:26洪玲嬌邢艷陽
城市軌道交通研究 2021年4期
潘 亮 洪玲嬌 邢艷陽
(卡斯柯信號有限公司,200071,上海 ∥ 第一作者,高級工程師)
2019年2月21日出臺的《國家發展改革委關于培育發展現代化都市圈的指導意見》提出:要打造軌道上的都市圈,統籌考慮都市圈軌道交通網絡布局,構建以軌道交通為骨干的通勤圈。其重點在于整合都市圈區域內的城市軌道交通資源,加強建設多種制式的城市軌道交通,使之能適應城市的圈層化發展,滿足區域出行新需求。
為了滿足城市組團間高速、短間隔且無縫銜接的運營需求,必須實現多網融合,即實現不同制式軌道交通的互聯互通。具體來講,不僅要實現市域鐵路與一般鐵路的互聯互通,還要實現市域鐵路與城市軌道交通的互聯互通。
列車運行控制(以下簡為“列控”) 系統是多網融合方案中的關鍵系統之一。本文針對多網融合的列車運行控制系統關鍵技術進行分析。
1 既有列控系統方案
目前,國內的成熟列控系統有兩類。
1) 面向一般鐵路的CTCS(中國列車運行控制系統)。CTCS-2級列控系統(以下簡為“CTCS-2系統”)最為常用,其采用軌道電路和點式信息設備(應答器)來傳輸列控信息。軌道電路負責完成占用檢測檢查,并連續向列車發送控制信息;點式信息設備負責傳輸定位、限速和停車信息。因此,CTCS-2系統屬于點-連式列控系統。以此為基礎,城際軌道交通采用CTCS-2+ATO系統(CTCS-2級系統+列車自動運行系統)。CTCS-3級列控系統(以下簡為“CTCS-3系統”)也較常見,其采用無線通信系統和應答器來傳輸列控信息,由軌道電路負責完成占用檢測,由點式信息設備負責定位,屬于連續式列控系統。CTCS-2系統和CTCS-3系統適用于不同目標速度的線路,且均為準移動閉塞制式。市域鐵路的列車運行目標速度一般為120~160 km/h,可采用CTCS-2級系統或CTCS-2+ATO系統。
2) 面向城市軌道交通的CBTC(基于通信的列車控制)系統。CBTC系統為移動閉塞制式,其控制精度高,具有更高的效率和靈活性,可實現UTO(無人駕駛)。CBTC系統已具備滿足高密度開行和公交化運營需求的能力。
鐵路和城市軌道交通分別自成體系。要滿足多網融合的網絡化運營需求,市域鐵路的列控系統方案就不能簡單照搬。因此,本文將在CTCS-2與CBTC系統的基礎上研究多網融合下的列控系統方案。
2 列控系統中關鍵環節的融合分析
基于表1各方案的比較,對調度指揮系統、臨時限速系統、駕駛模式、軌旁列控子系統等4個關鍵環節的多網融合進行分析。
2.1 調度指揮系統的融合
2.1.1 調度指揮系統的差異
鐵路的調度指揮系統為CTC(中央調度集中)系統,城市軌道交通的調度指揮系統為ATS(列車自動監控)系統,二者差別較大。
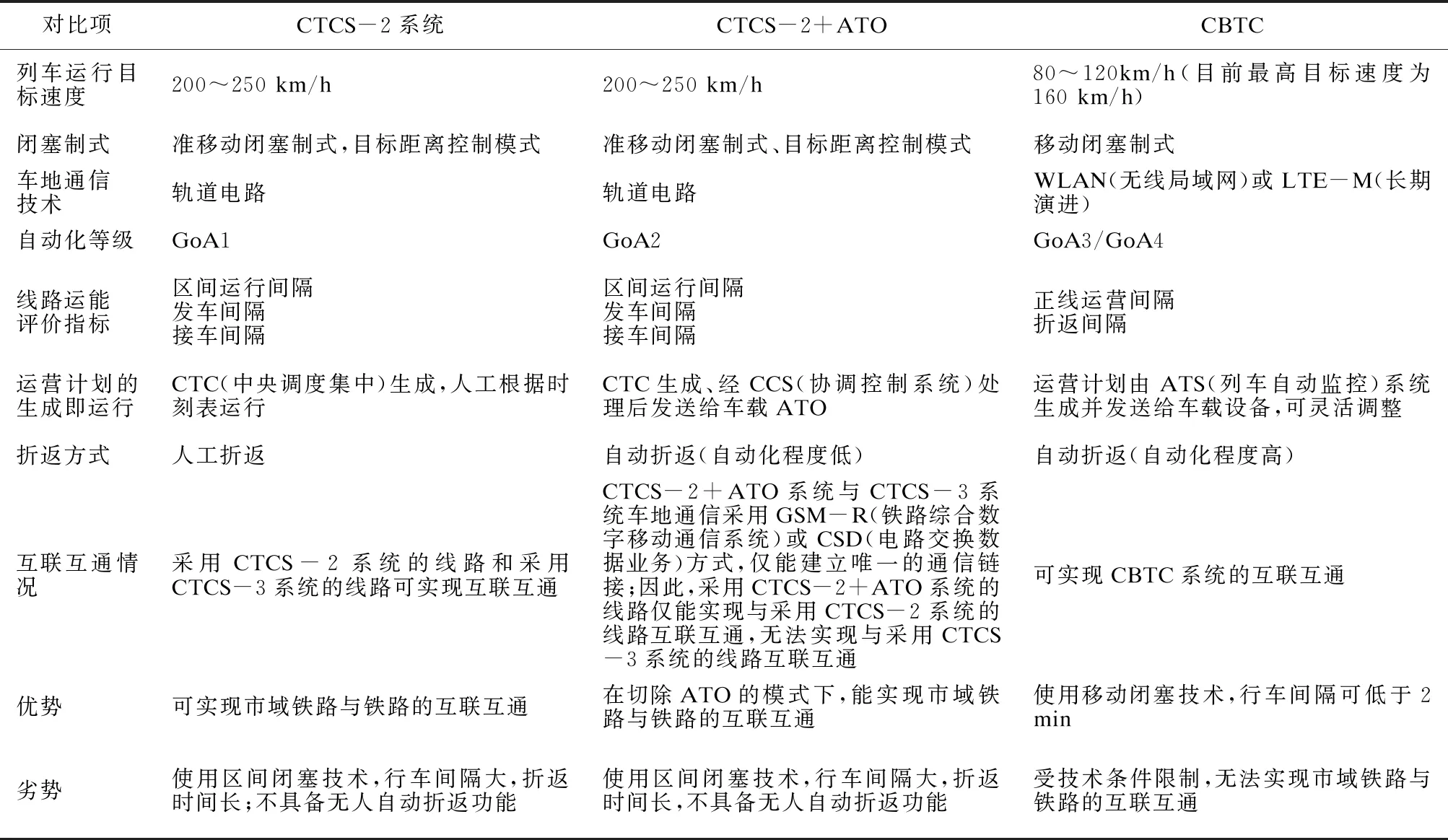
表1 列控系統方案對比
1) 應用環境不同。ATS系統用于城市軌道交通封閉線路。此類線路內作業的規律性較強,相應的列車運營組織自動化程度較高、運營效率較高。CTC系統的應用環境較復雜。鐵路列車的運營計劃受不同速度等級列車運行的互相影響、網絡化運營線路的影響及站內特殊作業等的影響,容易被干擾。
2) 崗位設置不同。城市軌道交通的調度指揮系統為全線集中管理,其作業流程相對簡潔,各類特殊作業干擾較小,自動化程度較高,故運營指揮相關人員的崗位層級較少。鐵路的調度崗位細化分工較多,非運營類的特殊作業較多,故在鐵路列車實際運營中,各調度崗位之間的作業流轉環節也較多,流程復雜。
3) 列車運行調整功能不同。鐵路運輸情況復雜、多變,CTC系統無法自動完成列車的運行調整。當列車運行圖被打亂后,CTC系統會進行預測,并提出多種可供選擇的修改方案,供調度員進行人工選擇確認并下發更新后的運行計劃。而ATS系統通過調整列車運行速度和停站時間,與ATO系統配合,高效完成列車運行自動調整。
2.1.2 融合方案
基于上述分析,面向多網融合的調度指揮系統,不僅要結合ATS系統的優勢,還要在管理層面優化運營組織、組織結構、運輸管理流程及線路作業(特別是折返交路作業等),以提高自動化程度。在市域鐵路聯絡線與CTC接口時,需做好市域鐵路與鐵路運行計劃的高效銜接。
因此,市域鐵路列控系統可以在ATS系統基礎上疊加CTC系統的功能,也可以在CTC系統基礎上融入ATS系統的高效運營調整理念,從而實現高密度市域鐵路多車型混跑條件下的運行控制及協同調度。
2.2 臨時限速系統的融合
CTCS-2系統的臨時限速功能通過臨時限速服務器來實現。CBTC系統的臨時限速功能通過軌旁ATP(列車自動防護)系統來實現。如果CTCS-2系統與CBTC系統的臨時限速功能都按既有的標準實施,則市域鐵路臨時限速操作及臨時限速設置狀態難以在兩個系統中實現同步。
為確保不同制式列車能在同一區域獲取相同的臨時限速,臨時限速功能應由統一且獨立的子系統執行。臨時限速子系統需要將設定的臨時限速值同步發送至TCC(列車控制中心)和ZC(區域控制器),并驗證發送至ZC與TCC中的臨時限速狀態是否一致。
2.3 駕駛模式的融合
在城市軌道交通與市域鐵路的接駁中,能兼容CBTC和CTCS等不同制式的車載信號系統駕駛模式 ,對整體運營效率的提升、運營成本的減少,都具有重要的意義。
目前不同制式的駕駛模式差異較大。CBTC模式下的列車控制等級為CBTC級別、點式列車控制級別和聯鎖控制級別。
CTCS-2系統屬于點連式列車控制級別。基于軌道電路連續發送的速度碼及應答器發送的限速信息,列車在控制區域內以自動駕駛模式或完全監控模式下的人工駕駛模式運行。
在不同列車控制級別下,CBTC系統和CTCS分配至應答器的功能不同。首先,CTCS的應答器除了用于列車定位以外,還用于發送速度等其他信息,而CBTC系統的應答器負責提供信號顯示信息;其次,CBTC系統和CTCS在應答器數據信息定義格式不同;再次, CTCS-2級系統屬于點連式的準移動閉塞,而CBTC系統屬于連續式的移動閉塞,故二者點式應答器作用不同;最后,應答器的布置要求差別巨大。
考慮到CTCS-2級系統的行車效率比CBTC系統在點式列車控制級別的行車效率高,也為了有效規避應答器的兼容性問題,列控系統多網融合可將CTCS-2級系統作為CBTC系統的降級模式備用系統,以簡化多網融合下的列控方案,提高列控系統的可用性。
優化后,不同的列控級別對應的列車駕駛模式如表2所示。
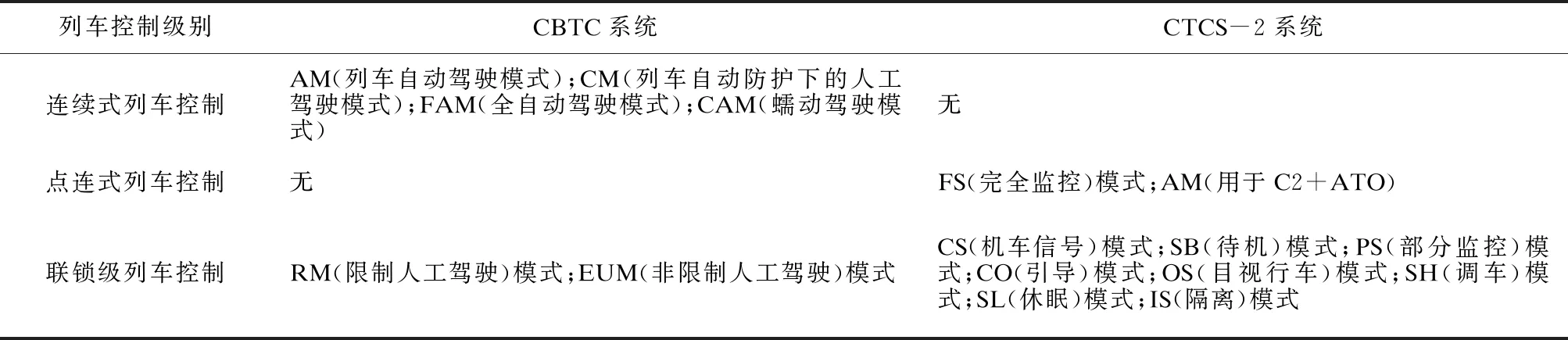
表2 各列車控制級別下的駕駛模式
在列車控制級別由較低等級切換至較高等級時,可由車載列控系統自動完成。在列車控制級別由較高等級切換至較低等級時,若不同控制級別下的設備都能正常工作,則由列車司機向列控系統發出人工降級請求;若較高控制等級的列控系統發生故障,則列車緊急停車,并在緩解緊急制動后降級至較低列車控制級別運行。
2.4 軌旁列控系統的融合
對于鐵路:軌旁CBI(計算機聯鎖)子系統負責站內的聯鎖進路,以及信號、道岔、軌道電路等軌旁設備的監控;TCC負責監控區間及區間無配線站的進路方向與信號,還負責控制轄區內所有線路的發碼。對于城市軌道交通:軌旁CBI子系統實現了區域化,負責整個區域軌旁信號設備的監控及方向控制;ZC基于CBI的方向及信號設備狀態來計算行車許可。
基于不同軌旁列控系統的特點,可形成兩套融合方案,具體如表3所示。
融合方案一,在由TCC負責的區間范圍內,若ZC基于TCC的方向及信號設備的監控狀態來計算行車許可,則CBTC系統的運行會受TCC故障的影響,進而降低信號系統可用性;此外,還需額外配置CSS(通信控制服務器),以控制屏蔽門。
融合方案二,將區間的方向及信號設備的監控狀態統一分配至CBI子系統實現。由CBI子系統負責站內和區間的方向控制,以及對線路所有信號設備狀態的監控;TCC和ZC分別基于聯鎖方向和設備狀態信息來計算各自的行車許可,實現了判定行車許可基礎信息的同源,并確保兩級列控系統能獨立運行、互不影響。因此,從信號系統的可靠性及可用性來看,融合方案二比融合方案一更優。
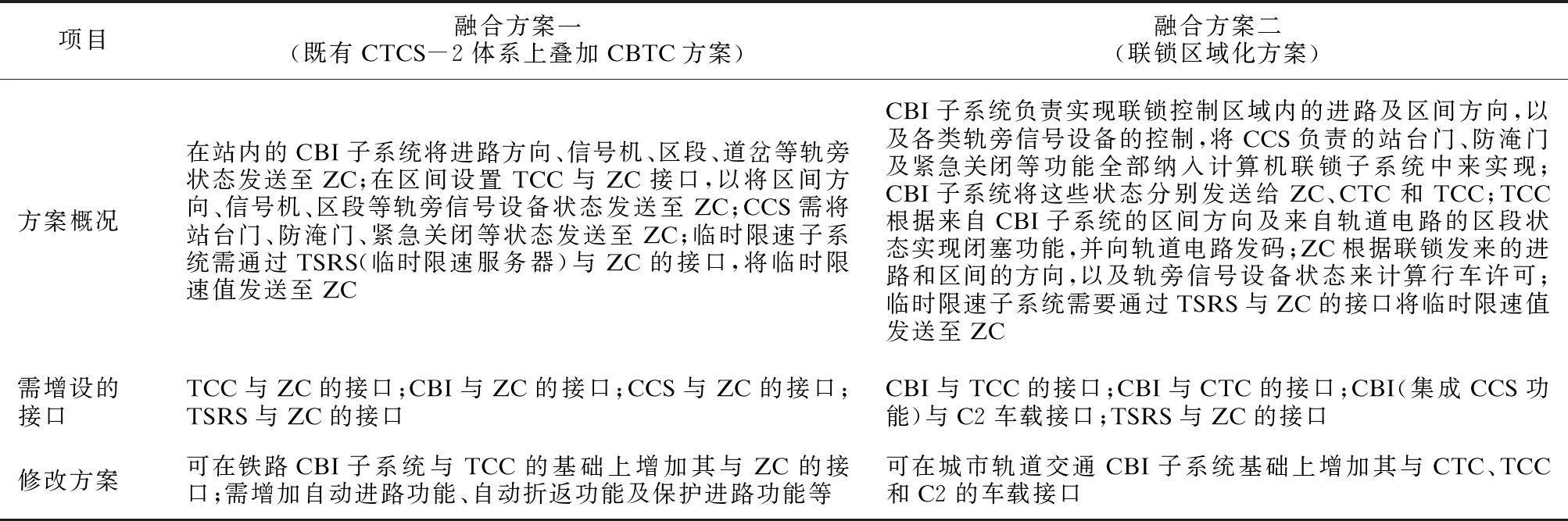
表3 軌旁列控子系統的融合方案
3 結語
在多網融合的框架下,面對市域鐵路的小運行間隔、高行車密度及靈活化運營需求,其列控系統建議采用聯鎖區域化方案,既可以實現與鐵路列車的聯通聯運,也可以在市域范圍內相對獨立地以CBTC模式運營以確保線路的運能。
臨時限速、站內和區間的列車運行方向、信號設備狀態等均由同一CBI設備計算,并同步發送至TCC和ZC用于行車許可的計算,從而使得信號系統功能高內聚、系統間接口低耦合,進而降低列控系統復雜度,提高信號系統的可靠性和可用性。
車載信號系統的駕駛模式將結合不同的制式靈活配置,既可單獨的配置CTCS-2或者CBTC相應的車載設備,也可融CTCS-2和CBTC所有駕駛模式為一體,形成兼容兩種制式的車載信號子系統方案。靈活的組態方案可滿足多網融合不同制式下的運營需求。
軌道交通列控系統是多網融合方案中重要的一環。多網融合方案屬于復雜系統工程,需要以需求為導向,在線路規劃、運輸組織、運營管理、行車能力、列車車輛、線路、限界、通信及供電等多個專業協同發展,共享網絡資源,共同實現多層次、多模式、多制式的軌道交通多網融合。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
云南畫報(2021年12期)2021-03-08 00:50:54
北京測繪(2020年12期)2020-12-29 01:33:58
現代出版(2020年3期)2020-06-20 07:10:34
鐵道通信信號(2018年7期)2018-08-29 01:17:04
家庭影院技術(2017年9期)2017-09-26 03:41:45