二維修正彈雙核控制系統設計
2021-04-27 10:23:26杜忠華劉仁杰馬瑞雪魏遠旺
機械與電子 2021年4期
關鍵詞:系統
肖 雨,杜忠華,劉仁杰,馬瑞雪,魏遠旺
(南京理工大學機械工程學院,江蘇 南京 210094)
0 引言
二維彈道修正技術是常規彈藥發展的主要方向,目前其正朝著射程更遠、精度更高的方向發展[1]。彈箭精確化以普通火炮為發射平臺,將其改造成體積小、抗過載能力強的新型智能彈藥,在戰場上形成壓制火力。智能彈藥與普通導彈相比,在信息含量和技術含量上有很大提高,對于我國防空反導裝備和技術的發展具有極其重要的現實意義。
作為修正彈藥的核心,控制系統對接收到的信息進行處理,并控制各模塊協同工作完成彈道修正,其性能影響重大,對二維修正彈控制系統的研究具有重大意義。
二維修正控制系統對實時性有較高要求,基于DSP或單片機的單核控制系統難以滿足實時性要求。本文設計了一種基于DSP+STM32的雙核控制器,并對其進行軟硬件設計和實驗仿真驗證。
1 二維修正控制系統原理
二維修正是在一維修正的基礎上加入橫向修正,提升精度的同時也增加了控制難度[2]。本方案選用連續修正閥作為修正執行機構,如圖1所示,閥芯上有多個扇形出氣槽,在外壁上有4個互為90°的噴射孔,閥芯上有凹槽與電機輸出軸相連。電機轉動時,帶動閥芯旋轉,通過驅動器調節電機轉至不同角度,可使不同位置噴射孔噴氣,以此來達到修正目的。
在發射前先將標準彈道存儲在非易失性的FRAM鐵電存儲器中,系統上電初始化,通過GPS和地磁傳感器探測到彈體實時位置與狀態信息,然后DSP對接收到的數據處理,解算出彈體實際運行軌跡。將實際彈道與預先裝訂的標準彈道進行比較獲得偏差值,再根據偏差值計算出所需的修正量[3-4]。同時根據計算得到的修正量形成控制指令,與STM32進行通信,STM32設置定時器,待定時器時間到,起爆電路引爆火工品,電機帶動修正閥芯旋轉,可使不同位置噴射孔噴氣,實現彈道修正。
圖1 修正機構示意
2 控制器設計
本文設計的基于DSP和STM32的雙核控制器,具有高實時性。DSP控制器選用具備32位浮點處理單元的TMS320FF28335[5],外設集成度高,能實時快速地實現各種數字信號處理算法,抗干擾能力強,此外,由于其具備高速處理能力,可用于數值運算密集的彈道信息處理等。而單片機的控制芯片選用STM32F427ZGT6,該芯片集成了單周期DSP指令和FPU(浮點單元)。控制器系統結構如圖2所示。該系統主要由5個主要模塊組成,分別是電源模塊、DSP與STM32最小系統模塊、升壓起爆模塊、存儲和通信模塊、修正機構驅動模塊。控制器系統各模塊主要功能如下:
a.DSP負責GPS和地磁信號處理,獲得彈體實時坐標和姿態,輸出火控參數給STM32,并輸出PWM波控制電機啟停及正反轉,以實現彈道修正功能。
b.STM32與DSP通信,在接收到控制信號后實時控制升壓起爆電路工作。
c.電源模塊作為控制器的核心部分,用于向其他模塊提供穩定工作電壓[6],使電路兩端電位差維持在恒定狀態。
d.電機驅動模塊驅動電機正反轉,以此帶動修正執行機構精準動作,實現修正功能。
e.升壓起爆模塊負責引爆火工品。
f.FRAM作為數據存儲載體,掉電不丟失。
g.GPS模塊和地磁模塊可用于測量彈體實時坐標和姿態。
圖2 系統結構框圖
2.1 電源模塊
系統外部輸入24 V直流電源供各模塊使用,利用 LM2596 降壓型電源管理芯片將24 V電壓分別降壓至5 V、3.3 V、1.9V。采用LM2577芯片輸出15 V電壓供電機驅動芯片工作。芯片內核工作電壓為1.9 V, GPIO 口工作電壓為3.3 V,5 V電壓則作為IR2130等其他芯片的工作電壓。電源模塊設計框架如圖3所示。
圖3 電源模塊設計
2.2 存儲和通信模塊
存儲模塊用于存儲GPS數據和彈道解算參數,以便對后續的控制算法進行改進。本文選用FM24CL64作為系統隨機存儲器,其寫數據無延時、掉電數據保持10年的特性,保證了系統的可靠性。
通信模塊主要用于DSP芯片與STM32芯片的通信,當DSP彈道解算完成,輸出控制信號給STM32,控制升壓起爆電路工作。
2.3 修正機構驅動模塊
要控制修正機構動作,需要DSP發出PWM信號來控制開關器件的導通和關閉,使功率器件為電機的繞組提供良好的諧波電壓和電流,提升電機輸出轉矩的同時避免電磁擾動的產生。電機驅動電路如圖4所示。
圖4 修正機構驅動電路
為能給電機提供具有較大驅動能力的正弦波信號,本系統電機驅動模塊選用IR2130高壓驅動芯片,可以輸出6路驅動脈沖。其中3路輸出信號具有電平轉換功能。為提升控制精度,在電機的轉軸端配置增量式光電編碼器,能有效檢測轉子的位置。
在圖4所示驅動電路中,共包含3個P型場效應管和3個N型場效應管。P型場效應管放置在上臂,選用型號為IRFR1205,當A+端為高電平時,場效應管IRFR1205的柵極被拉低,故IRFR1205的柵極和源極之間會形成一個負電壓,場效應管NA+導通。R1與電源相連,作為NA+場效應管的上拉電阻,可上拉NA+的柵極,R1的電阻值選取應適當,若過小會導致三極管導通時電流過大,反之,若阻值選取過大會導致MOSFET柵極電壓上升速度緩慢,影響開關性能。R2的作用是作為基極電阻使三極管正常工作在放大區。R3的作用是下拉型抗干擾電阻。R4的作用主要是減少振蕩的同時減小柵極充電峰值電流,以及保護NA-型MOSFET不被擊穿。
2.4 升壓起爆模塊
本系統升壓模塊選用MAX8570系列升壓轉換器,其采用內部n溝道開關和p溝道輸出隔離開關,電源電壓2.7~5.5 V,輸出可達28 V。起爆電路如圖5所示。Vout_FIRE端用于為起爆模塊提供25 V工作電壓,火工品一端接FIRE,另一端與陰極連接。當接收到控制信號時,CTRL_OUT端變為高電平,可控硅導通,火工品起爆。同時為屏蔽方波信號的影響,選用SN74AHC86D四路2輸入異或門,STM32中2個IO引腳信號經過異或門作為升壓起爆模塊的控制信號,以免上電復位時IO口電平不定導致誤觸發。
圖5 起爆電路
3 軟件設計
本系統DSP與STM32開發環境分別基于CCS6.0和Keil5。控制系統工作流程如圖6所示。
圖6 控制系統工作流程
為節省GPS定位時間,在發射前先將衛星軌道參數存入GPS接收機,并將目標和環境信息存儲在非易失性的FRAM鐵電存儲器中[7],作為彈道解算的參考依據。彈丸發射后系統上電初始化,GPS接收機迅速定位確定發射點,并結合地磁傳感器接收彈體實時位置與狀態信息,然后DSP對接收到的數據處理,解算出彈體實際運行軌跡。將實際彈道與預先裝訂的標準彈道進行比較獲得偏差值,再根據偏差值計算出所需的修正量。同時根據計算得到的修正量形成控制指令,與STM32進行通信,STM32設置定時器,待定時器時間到,起爆電路引爆火工品,電機帶動修正閥芯旋轉,可使不同位置噴射孔噴氣,實現彈道修正。
3.1 數據接收與處理
GPS數據幀共10位,包括1個起始位、1個停止位、1~8位數據位、不設置奇偶校驗位[8]。當DSP接收到1幀有效數據,將其放入接收緩存寄存器,接收緩沖就緒標志位被置位,數據無效則重新接收。數據接收完畢,DSP對接收到的有效數據進行預處理和濾波,并將處理后的數據寫入臨時存儲器FRAM。
為提升系統定位精度,避免隨機因素干擾,本系統采用無跡卡爾曼濾波(UKF)算法對接收到的彈道數據進行處理[9]。UKF算法基于線性濾波框架,通過使用無跡變換來處理非線性傳遞問題,對精度和穩定性有保障。非線性彈道觀測方程組為

(1)
X為狀態量;W為過程噪聲;V為觀測噪聲;k為時間序列;f為非線性狀態方程函數;h為觀測方程函數。
UKF算法處理過程主要分為以下幾個步驟:
a.根據式(2)和式(3),計算出2n+1個采樣點及相應權值,也稱為(無跡)UT變換。
(2)
(3)

b.計算Sigma點集的一步預測和協方差矩陣,并根據得到的預測值進行UT變換,產生新的Sigma點集。
c.將最新得到的Sigma點集代入式(1),計算出預測觀測量,并通過加權求和得到系統預測的均值及協方差。
d.計算增益矩陣,并進行狀態和協方差更新。
3.2 修正機構控制
本系統采用增量式光電編碼器結合DSP的eQEP模塊,用于檢測電機的轉速、轉向以及電機的絕對位置信息和相對位置增量。
為提升修正機構動作精度,加快控制系統響應速度,采用基于神經網絡的位置-速度雙閉環PID控制算法[10]對脈沖修正機構進行精準控制。將PID控制規律與神經元網絡相結合,根據控制效果進行在線學習和調整,加快收斂速度,提升控制系統性能。
PID控制由比例、積分、微分3個環節組成,并形成統一標準信號控制修正執行機構動作。將PID和神經網絡相結合主要有2步:首先定義具有比例、積分、微分功能的神經元,構成PID神經元;接著根據PID神經元控制規律使基本神經元構成新的神經網絡,并找到合理有效的計算學習方法。作為對傳統PID控制的改進型控制算法,單神經元構造PID控制器網絡輸入為
(4)
PID控制器網絡輸出為
u(k)=W1X1(k)+W2X2(k)+W3X3(k)
(5)
Wi為PID控制器中的參數KP、KI、KD,可以通過在線調整PID的3個參數使之達到最優值,進而達到改善控制系統性能的目的。
4 實驗及仿真
4.1 通信模塊功能驗證
利用CCS對DSP與STM32通信過程進行仿真觀察,當DSP與STM32開始通信前,標志位均為初始值0;DSP向STM32發送數據后,tx_flag標志位置位,STM32正確接收后,其LED全部點亮,DSP接收到0xAA,置sci_tx_success標志位,并點亮其2個LED,最終2個芯片的LED均全部點亮,驗證了該模塊通信較為可靠,滿足設計功能要求。
4.2 升壓起爆模塊功能驗證
要驗證電路板的升壓起爆模塊。首先在上電前將代碼燒寫入電路板,接著將火工品兩端分別連接FIRE和GND線,系統上電初始化后等待數秒,點火頭被引爆。同時通過示波器觀察起爆瞬間火工品兩端電流變化,在起爆瞬間火工品兩端電壓高達25 V,且只有當FIRE和CTRL控制信號同時作用才能起爆成功,起爆波形如圖7所示。由圖7可看出升壓起爆模塊功能正常,滿足設計要求。
圖7 起爆放電波形圖
4.3 數據接收與處理仿真驗證
發射2 s后開始接收測量數據,并對二維修正彈全彈道進行UKF濾波。首先設置過程噪聲和量測噪聲協方差矩陣、彈丸自身參數等產生初始彈道數據的初始條件。x-z平面彈道軌跡如圖8所示。
圖8 x-z平面彈道軌跡
仿真表明對彈道數據進行UKF濾波處理可以降低測量數據帶來的誤差,提升控制系統精度。
4.4 修正機構控制模塊驗證
要驗證電機驅動模塊功能是否符合設計要求,首先需要搭建實驗設備,編寫代碼控制電機正反轉,先穩定加速到最大設定值,后勻減速直到電機轉速為0,再控制電機按設定規律進行反轉。通過示波器觀察電機空載時運行過程的PWM波形圖,驗證表明電機驅動模塊功能正常。
為驗證脈沖修正機構功能特性,搭建直流電機控制平臺,采用增量式光電編碼器配合DSP的eQEP模塊,用于檢測電機的轉速、轉向以及電機的絕對位置信息和相對位置增量。對脈沖修正電機控制模塊進行系統建模,并采用PID神經網絡控制算法進行仿真試驗,驗證脈沖修正機構的實時性與可靠性。選取恰當的電機階躍信號幅值,修正機構的電機響應特性曲線和控制誤差曲線分別如圖9和圖10所示。
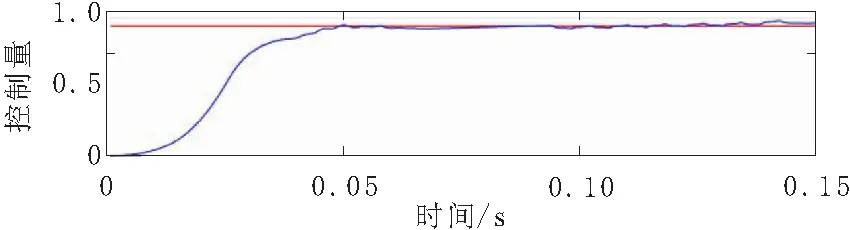
圖9 修正機構電機響應曲線
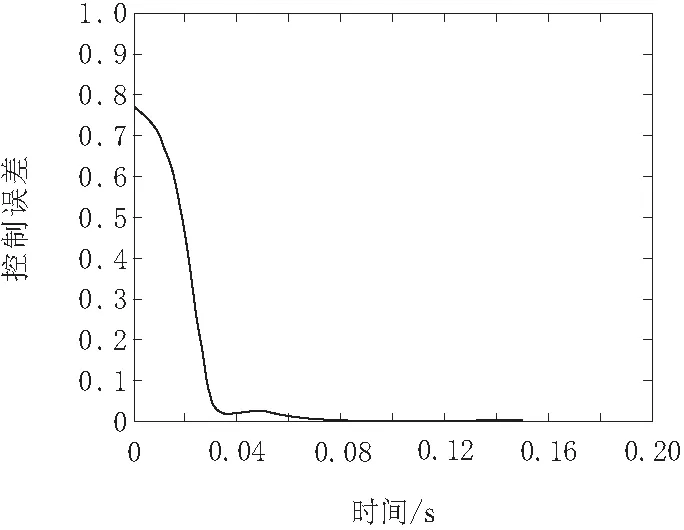
圖10 控制誤差曲線
由圖9和圖10可知,修正執行機構控制量能迅速響應,趨近目標值,且控制誤差會在起控初期急劇下降,最后將誤差限定在極小的范圍內,表明采用神經網絡對修正執行機構電機進行控制效果較好,能保證修正機構控制精度和實時性。
4.5 系統聯調
為驗證該控制系統工作性能,采用蒙特卡洛打靶法對修正控制效果進行分析,忽略隨機誤差的影響,圖11為給出的二維修正彈算例在修正前和修正后的彈道落點散布圖(模擬打靶100次),由圖11可知,修正后彈道落點散布密集度得到較大提升,滿足設計要求。
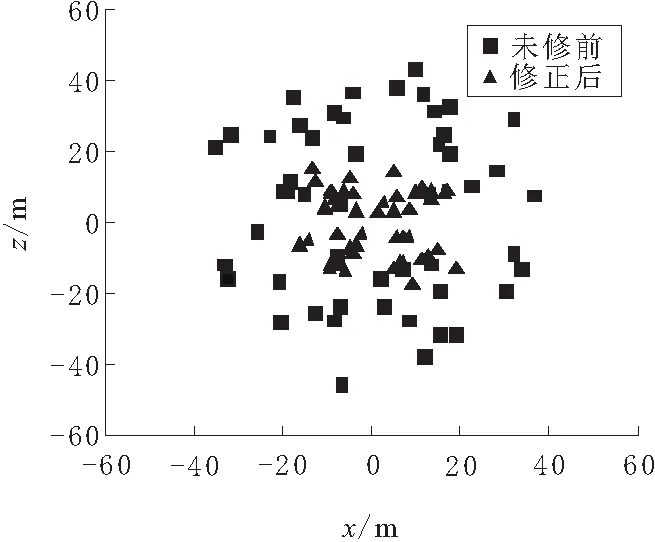
圖11 落點散布對比圖
5 結束語
為提升二維彈道修正控制系統精度和實時性,本文采用連續修正閥作為修正執行機構,設計了一種基于DSP和STM32的雙核控制器,完成了控制系統總體結構設計,并對主要功能模塊展開詳細的軟硬件設計,采用無跡卡爾曼濾波對彈道數據進行處理,并對修正機構進行神經網絡PID控制,通過實驗與仿真,驗證了控制系統的實時性與可靠性,為類似控制系統設計提供參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
