
基于ADAMS的軟墊式座椅動態特性研究
2021-04-29 00:22:26蔣亮亮廖龍杰劉曉鵬
汽車零部件 2021年4期
蔣亮亮, 廖龍杰, 劉曉鵬
(南京汽車集團有限公司汽車工程研究院,江蘇南京 211100)
0 引言
汽車座椅的動態舒適性與其動態特性有關,動態特性好的座椅,可以極大地提升乘坐感受,減輕乘員長時間乘坐的疲勞感。由于我國沒有對汽車座椅的動態舒適性作強制要求,且受到座椅廠商的重視程度以及試驗設備的限制,目前汽車座椅主要還是以安全性試驗和靜態試驗為主,舒適性評估主要為汽車平順性試驗,通過主觀評價來實現對汽車座椅舒適性的評估,所以開展座椅動態特性研究對于座椅的開發設計以及與不同車輛的動態性能匹配都有著重要的參考意義。
本文作者以某商用車駕駛員軟墊式座椅為研究對象,在ADAMS軟件中建立了“人-椅”系統動力學仿真模型,在模型得到驗證的基礎上,利用該模型對座椅系統的動態特性參數進行優化和重新設計,來分析系統優化和改進后效果,從而得到該座椅最優化的方案組合。
1 “人-椅”系統動力學建模
對于汽車座椅,其垂直方向的振動對于乘坐舒適性的影響最大[1],故文中主要考慮座椅垂直方向的振動。結合對“人-椅”系統模型的研究,建立了一種五自由度“人-椅”模型,其中人體系統為四自由度,由4個質量塊組成:
(1)人體頭部質量塊,包括頭部和頸部;
(2)上部軀干質量塊,主要包括胸部和肩部;
(3)下部軀干質量塊,主要包括腰和腹部;
(4)大腿和盆骨質量塊。
各個質量塊之間通過彈簧和阻尼進行連接。
由于文中主要討論駕駛員用軟墊式座椅,故座椅系統為單自由度,座椅通過剛度、阻尼系統與車身底板連接。
1.1 “人-椅”系統模型建立
文中研究的軟墊式座椅,首先通過SimDesigner軟件將座椅的CATIA模型導入到ADAMS中。然后建立人體模型,結合“人-椅”系統動力學模型,對系統模型進行一定的簡化,根據座椅各權重關系綜合分析,其約束和簡化原則如下:
(1)只分析系統垂向振動,不考慮橫向和縱向振動,故對垂直方向作平移運動副約束;
(2)座椅座墊等效為彈性阻尼元件,不考慮座墊與骨架、人體與座椅間的相對摩擦力;
(3)各質量塊之間只考慮它們的線性特征,主要影響因素為剛度K和阻尼ε值;
(4)各質量塊質心方向垂直且重合,不考慮人體乘坐后靠背角與垂向的角度影響。
其中軟墊式座椅實物如圖1所示,三維幾何模型如圖2所示。

圖1 某商用車軟墊式座椅

圖2 座椅三維幾何模型
根據以上對于人體模型的描述,在ADAMS建立簡化后的模型,通過ADAMS剛體模型工具分別建立人體頭部質量塊、上部軀干質量塊、下部軀干質量塊和大腿盆骨質量塊,并對各質量塊屬性進行修改,為各質量塊添加平移運動副約束,然后各質量塊之間添加彈簧阻尼器連接,同時設置彈簧阻尼器的預載、剛度以及阻尼值。人體模型建好后,通過ADAMS移動工具,將人體與座椅模型進行組合,建立五自由度“人-椅”模型,其中人體系統為四自由度,座椅系統為單自由度,“人-椅”系統ADAMS模型如圖3所示。

圖3 “人-椅”系統ADAMS模型
其中“人-椅”系統模型中的各參數值參考文獻[2],具體參數見表1。

表1 人體系統參數
1.2 座椅系統性能參數確定
影響座椅系統動態特性的參數主要有座椅的剛度和相對阻尼系數,所以為了進一步仿真分析,還需要通過試驗來獲取座椅系統的相關參數。
文中關于座椅系統性能參數的測定,依據行業標準QC/T 55—1993《汽車座椅動態舒適性試驗方法》展開,該標準規定了汽車座椅的靜載試驗和頻響特性試驗項目及試驗方法,該標準適用于汽車軟墊式座椅和懸掛式座椅。
(1)座椅靜載試驗
通過座椅靜載試驗可以測定座墊的靜剛度值,靜載試驗設備為液壓伺服試驗臺,試驗臺配置的線性作動缸,可以實現力閉環或位移閉環的精準控制。靜載試驗所用座墊加載板為GB/T 11559—1989標準規定的假臀曲面板,其座墊加載板質量為51 kg,按照試驗方法規定,測得該座椅的剛度值為42.78 N/mm,座椅靜載試驗裝置如圖4所示。

圖4 座椅靜載試驗裝置
(2)座椅頻響特性試驗
座椅的相對阻尼系數是衡量座墊減振性能的重要指標,座椅在受到外界激勵后,由于座墊黏彈性的存在,其產生的響應必然滯后于激勵信號,這種滯后可以表征為阻尼耗能的能力。測定座椅相對阻尼系數,工程上一般可以通過頻響特性試驗測定,即對座椅進行外界掃頻信號激勵,使其產生動態響應,因座椅響應特性與阻尼系數有著密切的聯系,通過對響應信號進行處理和分析,來確定座椅的相對阻尼系數。
此次座椅頻響特性試驗臺為MAST多軸振動系統,座椅安裝于振動臺平面上,其位置與傾角與實車安裝狀態一致,座墊上方與座椅安裝地板分別布置兩個加速度傳感器,分別為座墊加速度傳感器和地板加速度傳感器,其中座墊加速度傳感器平放于座椅表面,放在座椅上方人體落座后坐骨結節連線的中點。地板加速度傳感器布置于座椅正下方的安裝地板上,加載板規格、形狀同座椅靜載試驗,加載板載荷中心的鉛垂線與座墊載荷中心位置的載荷方向線重合。座椅頻響特性試驗裝置如圖5所示。

圖5 座椅頻響特性試驗裝置
試驗臺的激勵信號為寬帶白噪聲,其掃頻范圍為0.5~20 Hz,振動臺面的加速度均方根值為2 m/s2(0.2g),試驗重復進行3次,每次掃頻持續時間為5 min,3次測量座椅上的加速度均方根值與其平均值的偏差為2.5%,滿足標準規定偏差不大于其平均值±5%的要求,測得該座椅的頻率響應特性如圖6所示。
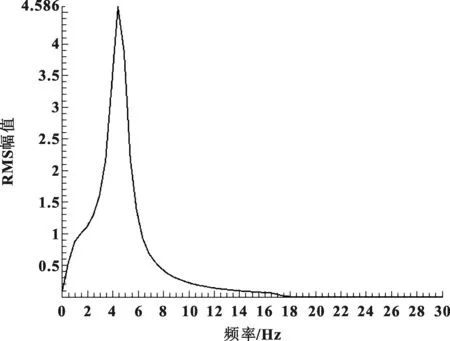
圖6 座椅頻響特性試驗裝置
根據測試結果可知,該座椅在4.5 Hz左右時有一個共振峰,該頻率即為座椅的固有頻率,此時可以通過座椅共振頻率與半功率帶寬,來確定座椅相對阻尼系數,該方法在工程上也稱半功率帶寬法,其計算公式為
(1)
式中:(fH-fL)為半功率帶寬,即幅頻特性圖上幅值最大A的 0.707倍的兩點對應的頻率間隔;f0為共振頻率,即座椅的固有頻率;ε為座椅系統的相對阻尼系數。
通過座椅頻響特性試驗曲線,可知其試驗結果見表2。

表2 座椅頻響特性試驗結果
綜上,通過對該座椅總成進行座椅靜載及頻響特性試驗,可以得到該座椅剛度K值以及相對阻尼系數ε值,另外通過測力計測得該座椅總成的質量ms值,具體參數見表3,為下一步ADAMS虛擬仿真與模型驗證提供數據支撐。

表3 座椅總成系統參數
1.3 “人-椅”系統動力學模型驗證
為了驗證“人-椅”系統模型的準確性,需要對“人-椅”系統動力學模型進行試驗對比驗證,以確定“人-椅”系統仿真模型的準確性。
模型驗證的主要思路:
(1)進行座椅臺架試驗,試驗項目同上節座椅頻響特性試驗,測得振動臺面和座墊上方加速度時間歷程信號,從而得到座墊上方加速度響應的幅頻特性曲線。
(2)將振動臺寬帶白噪聲驅動信號作為樣條信號,在ADAMS軟件中對“人-椅”系統模型進行掃頻激勵,測量仿真模型座墊上方的加速度時域信號,在ADAMS后處理模塊中得到座墊上方加速度響應的幅頻特性曲線。
(3)最后通過時域信號與頻域信號對仿真結果與試驗結果進行對比驗證,以確定動力學模型的準確性。
由于座椅頻響特性試驗中所采用的座墊加載板為GB/T 11559—1989標準規定的假臀曲面板,其座墊加載板質量為51 kg,而“人-椅”系統ADAMS模型中人體總質量為55.2 kg,故在此次試驗中對座墊加載板進行了配載,以確保試驗與仿真狀態的一致性。
座椅頻響特性試驗驅動信號為Mast多軸振動臺Sinesweep軟件模塊生成的寬帶白噪聲,其掃頻范圍為0.5~20 Hz,覆蓋了人體敏感的振動區間,振動臺面的加速度均方根值為2 m/s2(0.2g),為了確保仿真激勵信號與試驗一致,采集得到試驗臺的臺面加速度響應信號作為仿真樣條信號,以驅動仿真模型,仿真模型掃頻驅動信號如圖7所示。
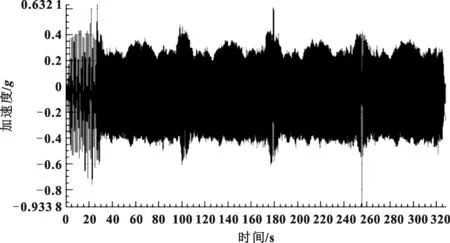
圖7 仿真模型掃頻驅動信號
用ADAMS軟件樣條函數生成約束驅動作為仿真激勵。ADAMS/View 允許采用3種插值方法,即:3次樣條曲線擬合、B樣條曲線擬合、Akima擬合法。它們對應的函數分別為CUBSPL、CURVE、AKISPL。文中采用樣條CUBSPL函數進行約束驅動,其函數表達式如下:
Acce(time)=CUBSPL(1st_Indep_Var, 2nd_Indep_Var, Spline_Name, Deriv_Order)
式中:1st_Indep_Var 為時間變量time;
2nd_Indep_Var設為0;
Spline_Name為自變量的初始值;
Deriv_Order設為0。
使用樣條函數驅動座椅動力學仿真模型,測量模型地板與座墊上方垂向質心位置加速度時域信號曲線,在ADAMS/PostProcessor后處理模塊中,對仿真數據進行分析,對測量到的加速度信號進行FFT變換,得到地板與座墊兩處加速度幅頻特性曲線,下面將通過仿真時域信號與頻域信號對仿真結果與試驗結果進行對比驗證,以確定動力學模型的準確性。
根據模型仿真試驗,可測得座墊上方加速度時域信號,其結果與試驗臺測得的目標信號對比如圖8所示。
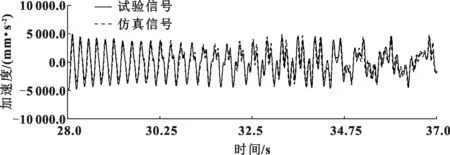
圖8 時域信號仿真與試驗對比(28~30 s段)
其中座椅幅頻特性曲線仿真與試驗結果對比如圖9所示。
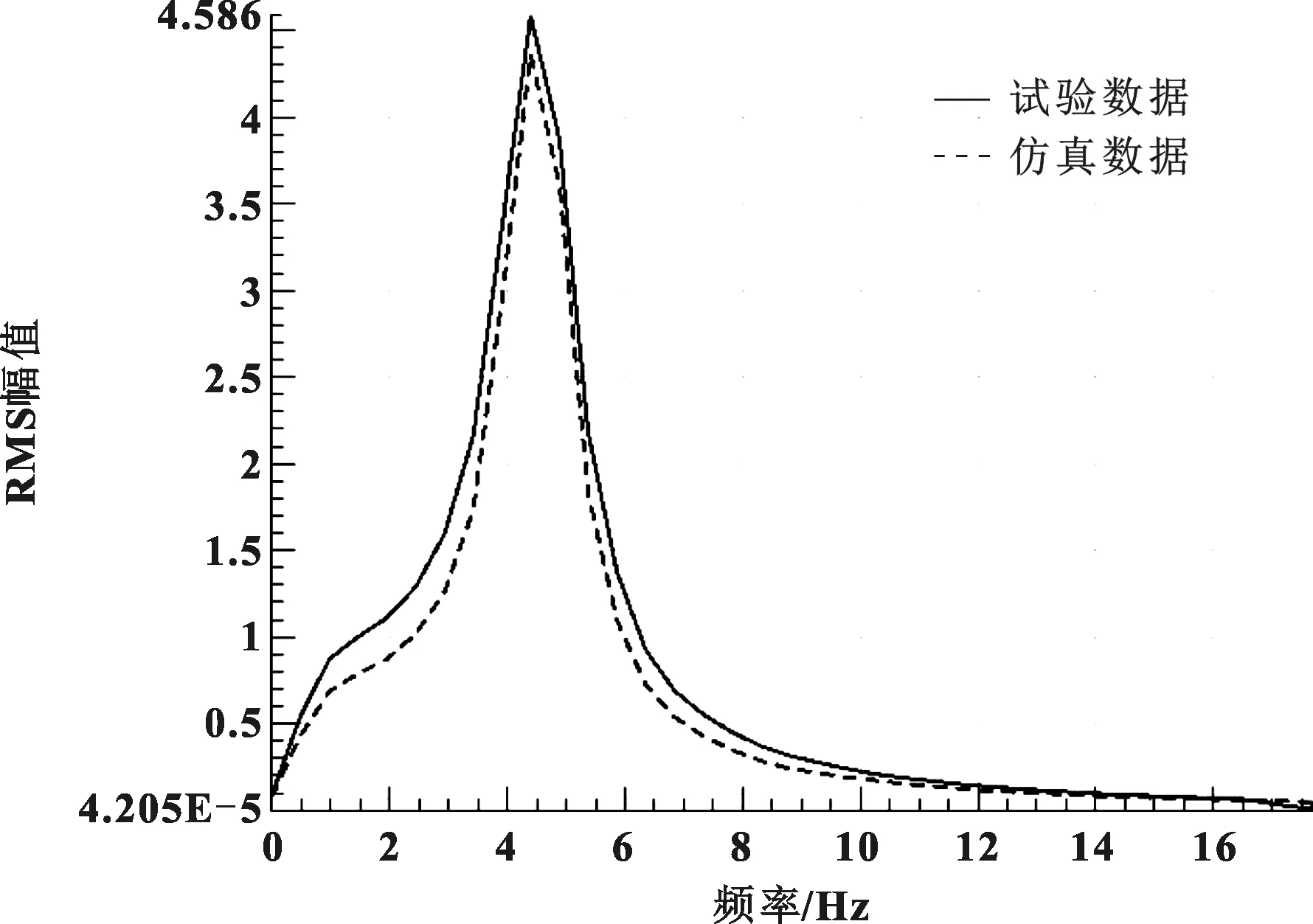
圖9 座椅幅頻特性曲線仿真與試驗對比
根據仿真與試驗結果,其中通過圖8時域信號對比分析得知,仿真模型中座墊上方加速度時域信號與試驗測得加速度時域信號基本吻合,較好地復現了加速度時域信號,通過圖9頻域信號對比,整理仿真與試驗頻響特性結果對比見表4。
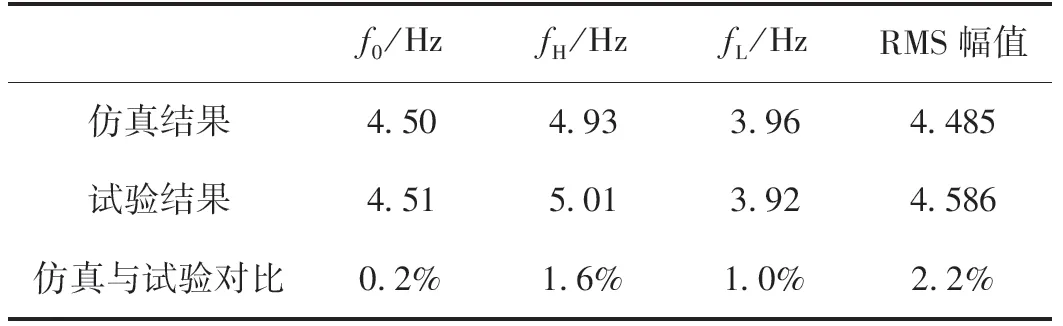
表4 座椅頻響特性試驗結果
對比結果可知,該座椅動力學模型的座椅幅頻特性在趨勢和量級上都與試驗結果基本一致,兩者偏差較小,驗證了模型的準確性。由于在建模過程中,存在部分假設和理想情況,沒有考慮到座椅間的摩擦,以及座椅與質量塊之間的壓力分布等,但是在仿真與試驗結果中,座椅的共振頻率基本吻合,且幅值峰值偏差較小,故證明模型建立比較合理,可以利用該模型做進一步分析。
2 座椅動態特性的研究
2.1 動態特性影響分析
目前商用車用軟墊式座椅,主要減振系統為座墊和骨架減振彈簧,座椅系統的非線性特性與座墊有很大關系,目前國內外振動舒適性較好的座椅一般都采用高回彈聚氨酯泡沫,不同的配方和密度的高回彈聚氨酯泡沫擁有不同的剛度和減振性能[3],將直接影響座椅的振動舒適性,座椅的座墊過軟,其直接影響合理的體壓分布,影響駕駛員坐姿,過軟的座墊其剛度也會較低,使得車輛行駛過程中,振動幅度變大,會直接影響駕駛員視線變化過頻而感覺到疲勞,如果座墊過硬,不僅體壓分布不合理,路面顛簸沖擊頻率高,同樣會使駕駛員產生疲勞感。
對于座椅動態舒適性,座椅的質量、剛度、阻尼以及座椅連接件之間的摩擦力都會影響其振動舒適性,顯然,無論對于哪種優化目標,座椅的剛度越小優化結果越好,但是相應的座椅變形量越大,反而會增加人體的不舒適度。因此座椅系統的剛度應該采取最小值限值,而軟墊式座椅系統的阻尼系數與其固有特性有關,同時座椅系統質量大時對人體動態舒適性有利,但是考慮到成本和輕量化,其質量也不能太大,另外座椅連接件的摩擦因數越小,對人體動態舒適性越有利。
所以,根據不同車型的車輛的底盤性能特性,匹配合適剛度、阻尼的座椅系統,才能使得座椅具有較好的振動舒適性。
2.2 座椅動態特性參數的優化設計
在“人-椅”系統動力學模型得到驗證的基礎上,可以利用該模型對座椅系統的動態特性參數進行優化和重新設計,來分析系統優化和改進后效果,從而得到相應的改進和優化措施。如上文分析,影響座椅系統振動舒適性的主要因素為剛度和阻尼,降低座椅剛度K,適當增加座椅的相對阻尼系數ε的方式可改善座椅的傳遞特性,當然,座椅剛度還存在最小值限值,結合該商用車駕駛室座椅空間布置和適用人群特征,企業規范規定了座椅剛度最小值不低于25.0 N/mm,故將采用正交試驗方法,針對座椅垂直方向,取座椅剛度、阻尼兩個變量為試驗因素,其中剛度因素在其最低限值和現有剛度之間取3個水平,阻尼以座椅剛度最低限值進行分析對比,在原有阻尼基礎上每級增加20%水平,進行兩個因素九個水平DOE分析,正交試驗表見表5。

表5 座椅系統動態特性參數優化正交試驗表
根據座椅系統動態特性參數優化正交試驗表進行仿真驗證,其中相同阻尼,不同剛度對系統振動傳遞影響曲線如圖10所示,相同剛度,不同阻尼對系統振動傳遞影響曲線如圖11所示。
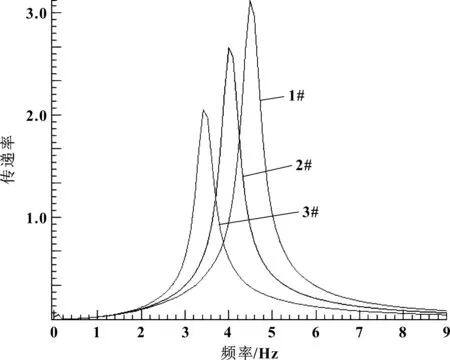
圖10 相同阻尼,不同剛度對系統振動傳遞影響曲線
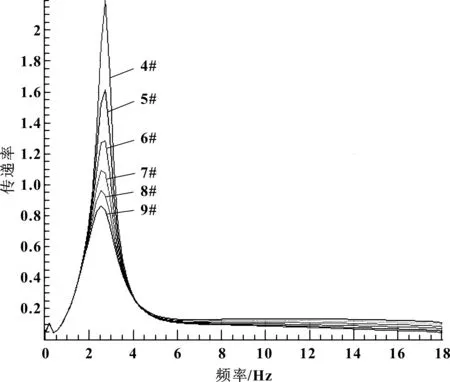
圖11 相同剛度,不同阻尼對系統振動傳遞影響曲線
由圖10可知,當系統相對阻尼不變,座椅系統剛度降低,座椅的固有頻率也同步降低,其中當K<34.22 N/mm時,座椅的固有頻率低于4 Hz,避開了人體垂向比較敏感的4~8 Hz頻率范圍;當K=25.0 N/mm時,系統的固有頻率為3.2 Hz,同樣處于合理范圍區間。
由圖11可知,當座椅剛度不變,相對阻尼改變,不會改變座椅系統的固有頻率,所以可知座椅的剛度決定了座椅的固有頻率,相對阻尼較小時,系統的共振峰較大,相對阻尼逐漸增加會使得共振峰降低,即座椅振動傳遞率進一步降低,但是隨著系統相對阻尼的增加,大于6 Hz區域座椅的振動傳遞率會逐漸增加。
為了找到相對阻尼的合理區間,利用模型仿真,通過座椅振動幅值均方根值進行對比分析,來進一步研究不同阻尼對座椅減振性能的影響,仿真采用ADAMS軟件函數庫中的SineSweep數學函數進行位移掃頻驅動,其函數表達式為SWEEP(time,5,0.0,0.0,20,20,0.01 ),測得座椅上方位移時間歷程,計算可得不同阻尼對應見表6。

表6 不同阻尼對應座椅振動幅值均方根值
根據各阻尼條件下座椅各振動幅值均方根值,得出不同阻尼對應座椅振動幅值均方根值(RMS)變化曲線,如圖12所示。
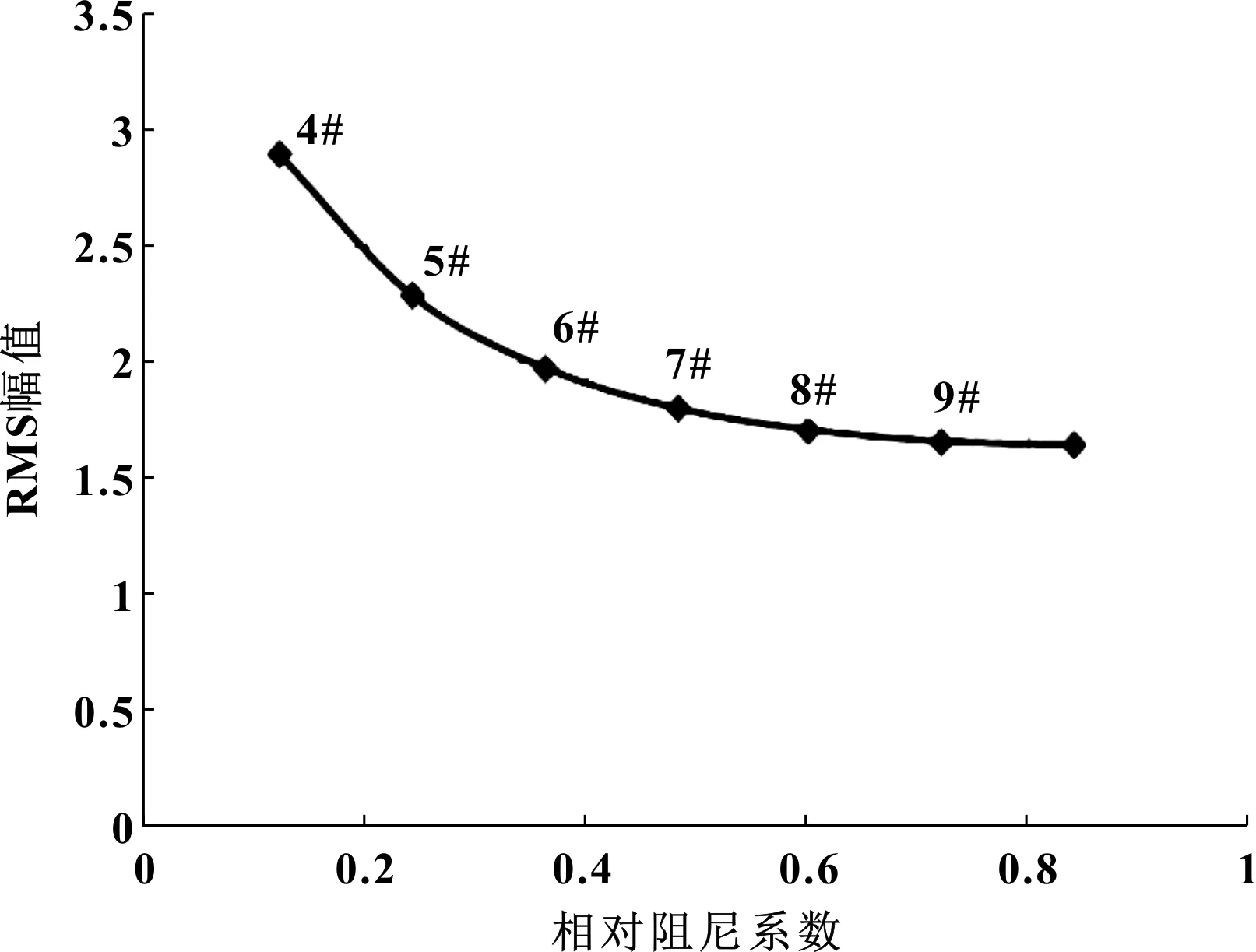
圖12 不同阻尼對應座椅振動幅值均方根值變化曲線
根據仿真結果可知,當座椅相對阻尼系統進一步增加,即ε>0.36時(6#仿真序列),座椅系統的振動幅值均方根值趨于平緩,由此說明,相對阻尼的進一步增加,對于座椅系統的減振效果不再明顯。
綜上可知,座椅的剛度決定了座椅的固有頻率,剛度降低,座椅系統的共振峰降低,同時座椅系統的固有頻率也跟著降低。座椅系統相對阻尼系數不改變座椅固有頻率,但是隨著相對阻尼系數的增加,座椅振動傳遞率進一步降低,當ε>0.36后,阻尼對于座椅系統的減振效果已不再明顯。結合仿真結果分析,當該商用車用軟墊式座椅剛度K處于25.0~34.22范圍,相對阻尼系數ε處于0.12~0.36范圍,可以得到動態舒適性較好的匹配效果。其中區間范圍內剛度取最小值,阻尼取最大值可獲得最佳效果,但是考慮到座墊材料、工藝水平等限制,獲得最理想狀態的座椅總成具有一定的難度,故該座椅總成的剛度和相對阻尼系數在合理范圍內取值均可接受。
3 結論
通過建立“人-椅”系統動力學仿真模型,并驗證了模型的準確性,同時對該座椅動態特性參數在仿真模型中進行優化設計,得出以下結論:
(1)座椅系統的剛度應該采取最小值限值設計。
(2)座椅的相對阻尼系數增加,座椅振動傳遞率進一步降低,當ε>0.36后,阻尼對于座椅系統的減振效果不再明顯。
(3)根據不同車型的車輛的底盤性能特性,匹配合適剛度、阻尼的座椅系統,才能使得座椅具有較好的振動舒適性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
