基于光纖陀螺的有軌結(jié)構(gòu)形變檢測方法研究*
2021-04-29 06:54:10李長杰甘維兵
交通科技 2021年2期
李長杰 蘇 州 甘維兵
(1.湖北交投智能檢測股份有限公司 武漢 430070; 2.武漢理工大學(xué)光纖傳感技術(shù)國家工程實(shí)驗(yàn)室 武漢 430070)
隨著大型工程結(jié)構(gòu)健康監(jiān)測技術(shù)的迅猛發(fā)展,涌現(xiàn)出了諸多形變測量方法[1],如傳統(tǒng)水準(zhǔn)儀、液壓式連通管、自動(dòng)機(jī)器人、光學(xué)成像測量方法等[2-3],其中目前較為常用的測量方法主要有傳統(tǒng)水準(zhǔn)儀、液壓式連通管和自動(dòng)機(jī)器人。水準(zhǔn)儀具有檢測精度高、點(diǎn)位可以任意設(shè)置等優(yōu)點(diǎn),但實(shí)施工作量較大,效率不高;連通管具有檢測精度高、智能化程度高等優(yōu)點(diǎn),但安裝和實(shí)施較為麻煩;自動(dòng)機(jī)器人測量精度高,操作簡單,但測點(diǎn)有限,以上測量方法均屬于接觸式測量方法;光學(xué)成像測量是一種非接觸式、高精度測量方法,其智能化程度較高,較容易實(shí)現(xiàn),但受地形條件限制,其掃描范圍有限,易受鐵塔、高層建筑物遮擋影響[4-5]。
綜上所述,現(xiàn)有測量方法均在一定程度上存在不足,且大多數(shù)方法均屬于點(diǎn)式測量(點(diǎn)式測量方法通常用于大型結(jié)構(gòu)關(guān)鍵部位的定期測量,具有針對(duì)性,容易遺漏結(jié)構(gòu)其它部位存在的潛在病害)。王立新等[6]提出將FOG用于大型橋梁結(jié)構(gòu)形變測量,該方法具有良好的創(chuàng)新性,但測量精度只能達(dá)到3 cm左右;甘維兵等[7]提出了基于FOG的工程結(jié)構(gòu)微小形變檢測新算法,使得系統(tǒng)測量精度達(dá)到了1 cm,但仍不能滿足工程測量對(duì)高精度的要求。
通過對(duì)光纖陀螺用于結(jié)構(gòu)形變檢測誤差進(jìn)行分析,發(fā)現(xiàn)光纖陀螺自身發(fā)散性誤差、檢測路面的不平整,以及檢測小車行駛路徑偏差對(duì)測量精度影響較大,其中發(fā)散性誤差可以通過設(shè)置已知標(biāo)定點(diǎn)來減小;待測路面的不平整可以通過信號(hào)處理的方法來消除或減小;但檢測小車行駛路徑的偏差暫時(shí)很難找到合適的方法來消除,且對(duì)測量精度影響較大。
為此,本文提出一種基于光纖陀螺(FOG)的有軌結(jié)構(gòu)形變檢測新方法,即在待測結(jié)構(gòu)表面敷設(shè)一條永久性軌道,通過測量軌道線形來反演待測結(jié)構(gòu)形變,從而達(dá)到提高系統(tǒng)測量精度的目的。為驗(yàn)證其可行性,在實(shí)驗(yàn)室搭建了長度為9.5 m、最大拱高達(dá)到22 cm的模型橋,并在其表面鋪裝相應(yīng)自動(dòng)尋跡軌道,通過反復(fù)測試來檢驗(yàn)系統(tǒng)的重復(fù)性和測量精度是否得到顯著提高。
1 FOG線形檢測基本原理
將FOG裝載在某一固定小車上,當(dāng)小車運(yùn)行時(shí),F(xiàn)OG可以實(shí)時(shí)精確測量檢測小車運(yùn)行時(shí)相對(duì)慣性空間的轉(zhuǎn)動(dòng)角速度,通過數(shù)學(xué)方法獲取轉(zhuǎn)動(dòng)角速度沿運(yùn)載體坐標(biāo)系分量,結(jié)合檢測小車多線程編碼器輸出信息,運(yùn)用捷聯(lián)矩陣結(jié)合數(shù)學(xué)積分運(yùn)算方法即可推導(dǎo)出檢測小車運(yùn)行時(shí)的軌跡[8-9],F(xiàn)OG隨檢測小車運(yùn)行的軌跡即代表待測大型結(jié)構(gòu)表面連續(xù)線形,其檢測原理見圖1。

圖1 FOG用于結(jié)構(gòu)連續(xù)線形檢測基本原理
假設(shè)檢測小車從起始點(diǎn)i運(yùn)行到鄰近點(diǎn)i+1,由數(shù)學(xué)積分相似理論可知,當(dāng)檢測小車在兩點(diǎn)之間運(yùn)行的時(shí)間間隔t無窮小時(shí),第i+1點(diǎn)的坐標(biāo)(Xi+1,Yi+1)可以近似表示為[10]
(1)

(2)
式中:FOG運(yùn)行時(shí)的角速度為ωi+1;檢測小車運(yùn)行時(shí)的線速度為vi+1;檢測小車與待測結(jié)構(gòu)表面的初始夾角為θi;Xi+1為檢測小車運(yùn)行的高精度里程信息;Yi+1為待測結(jié)構(gòu)高程或形變信息;ΔX、ΔY分別為相鄰2個(gè)時(shí)刻的里程、高程變化值。假設(shè)檢測小車前輪與后輪之間的距離為L,且長度L相對(duì)于待測結(jié)構(gòu)形體大小是可以忽略不計(jì)的,即可將檢測小車視為一個(gè)運(yùn)動(dòng)質(zhì)點(diǎn),由數(shù)學(xué)表達(dá)式(1)和(2)建立的遞推關(guān)系,即可計(jì)算出檢測小車沿待測結(jié)構(gòu)表面運(yùn)行時(shí)的連續(xù)線形曲線,檢測小車運(yùn)行的軌跡即可代表待測結(jié)構(gòu)表面連續(xù)線形。
2 FOG線形檢測系統(tǒng)
由FOG用于結(jié)構(gòu)線形檢測基本原理可知,檢測系統(tǒng)采用捷聯(lián)矩陣通過對(duì)多個(gè)運(yùn)動(dòng)參數(shù)進(jìn)行積分推演從而得到結(jié)構(gòu)形變測量結(jié)果,其中主要運(yùn)動(dòng)參數(shù)分別為FOG隨檢測小車運(yùn)行時(shí)的角速度Ω、檢測小車運(yùn)行時(shí)的線速度v、相鄰兩點(diǎn)之間最小運(yùn)行時(shí)間間隔Δt。FOG結(jié)構(gòu)線形檢測系統(tǒng)主要由FOG 、DSP信號(hào)處理器、多線程光電編碼器、光電傳感器、供電單元(蓄電池)、計(jì)算機(jī)及檢測小車七大模塊構(gòu)成,其檢測系統(tǒng)組成見圖2。其中,F(xiàn)OG用來測量檢測小車運(yùn)行時(shí)的角速度變化;里程儀為多線程光電編碼器,用來實(shí)時(shí)測量檢測小車運(yùn)行時(shí)的高精度里程信息;光電傳感器用來輔助檢測系統(tǒng)標(biāo)定;系統(tǒng)供電來源于車載電源或獨(dú)立的蓄電池;DSP信號(hào)處理器用來采集所有光類、電類傳感器信號(hào),并采用一定的算法對(duì)其進(jìn)行智能分析和深度處理;計(jì)算機(jī)用來對(duì)下位機(jī)發(fā)送過來的各種數(shù)據(jù)信息進(jìn)行加工處理、展示和存儲(chǔ)。

圖2 FOG結(jié)構(gòu)線形檢測系統(tǒng)
形變解算基本思路:將FOG采集到的角速度信息和多線程光電編碼器輸出的里程信息進(jìn)行聯(lián)合解算,即可獲得檢測小車在待測結(jié)構(gòu)表面運(yùn)行時(shí)的軌跡;考慮到FOG具有發(fā)散性特點(diǎn),需要采用待測結(jié)構(gòu)測量起點(diǎn)、終點(diǎn)坐標(biāo)對(duì)FOG姿態(tài)角偏差、多線程光電編碼器標(biāo)度因數(shù)誤差進(jìn)行修正,即可提高系統(tǒng)測量精度。FOG隨檢測小車沿待測結(jié)構(gòu)表面運(yùn)行的軌跡即表征待測結(jié)構(gòu)連續(xù)線形。
3 系統(tǒng)性能測試
在實(shí)驗(yàn)室模擬真實(shí)橋梁搭建了一座模型橋,其中橋梁中部拱起,兩側(cè)呈一定的起伏狀,見圖3。該模型橋全長9.5 m、中間拱高H1為22.7 cm、右側(cè)凹槽最低點(diǎn)高度H2為3.7 cm、模型橋兩端相對(duì)基準(zhǔn)面高度H3、H4分別為4.0,10.0 cm。
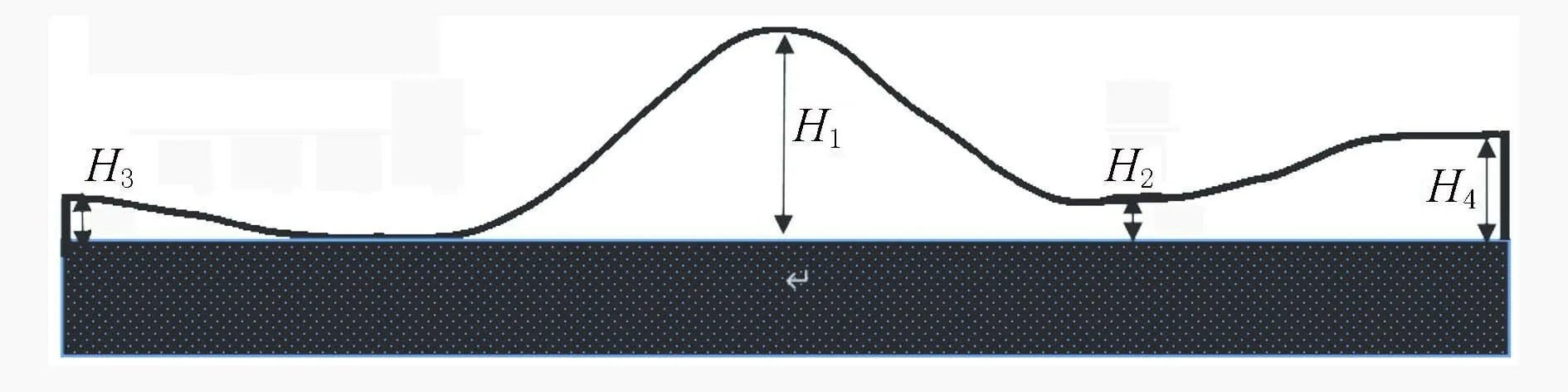
圖3 模型橋結(jié)構(gòu)尺寸圖
為了讓檢測小車每次運(yùn)行時(shí)的路徑保持一致,特在模型橋表面鋪設(shè)了1條自動(dòng)尋跡專用檢測軌道,該軌道采用粘接的方式緊貼模型橋表面,其試驗(yàn)場景見圖4。
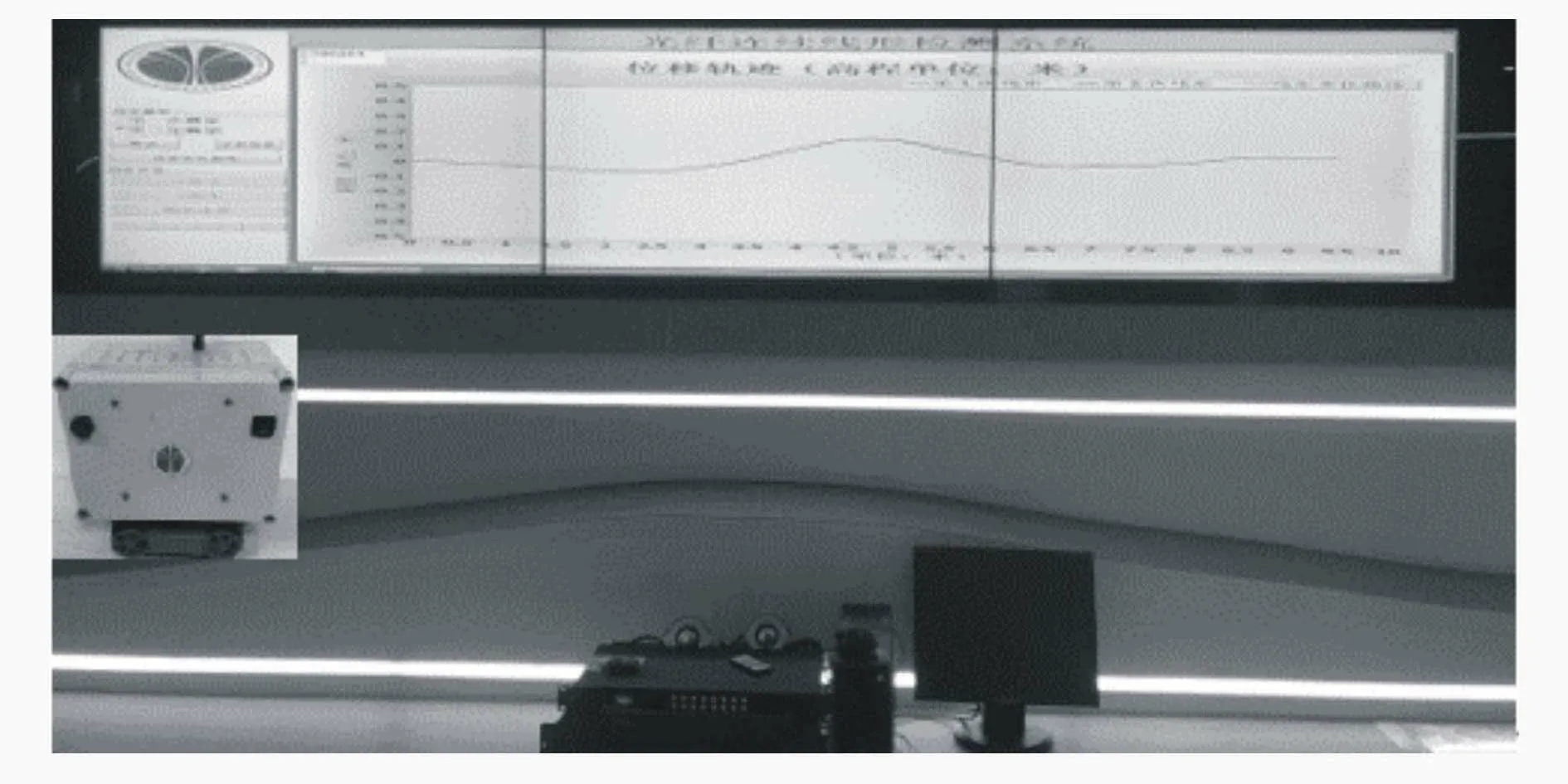
圖4 模型橋試驗(yàn)場景
利用實(shí)驗(yàn)室自主研發(fā)的無線遙控線形檢測小車在既有模型橋上進(jìn)行多次空載測試,其中遙控小車前、后輪軸距為11 cm,相對(duì)于長度為10 m的待測橋梁,可以將其視為一個(gè)質(zhì)點(diǎn)。與此同時(shí),采用激光測距儀準(zhǔn)確測量模型橋4個(gè)關(guān)鍵截面(H1、H2、H3和H4)相對(duì)基準(zhǔn)面的高程值,以便與FOG線形檢測系統(tǒng)測量值進(jìn)行對(duì)比。
讓智能檢測小車在有軌模型橋上測量多次,小車每次從同1個(gè)起點(diǎn)出發(fā),運(yùn)行里程為9.5 m,其測量線形曲線見圖5。

圖5 系統(tǒng)測量線形曲線
利用FOG線形檢測系統(tǒng)對(duì)模型橋測量多次,圖5為隨機(jī)抽取的2次測量線形曲線,其重復(fù)性良好,且能夠完全反映模型橋本身結(jié)構(gòu)形狀,證明系統(tǒng)可靠性較高。為了對(duì)系統(tǒng)用于有軌結(jié)構(gòu)形變檢測精度進(jìn)行定量分析,現(xiàn)將各關(guān)鍵截面(H1、H2、H3和H4)相對(duì)基準(zhǔn)面的高程值與設(shè)計(jì)值進(jìn)行比較,結(jié)果見表1。
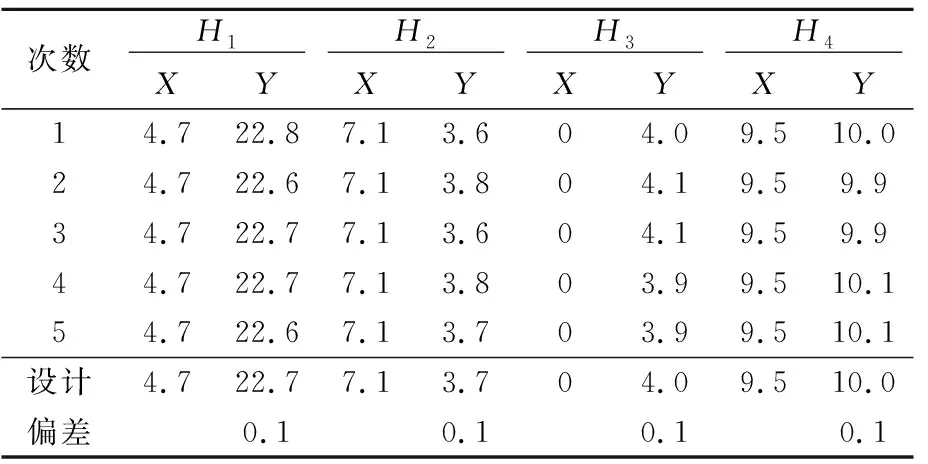
表1 關(guān)鍵截面(H1、H2、H3和H4)高程測量值
由表1可知,F(xiàn)OG線形檢測系統(tǒng)測量各關(guān)鍵截面5次的相對(duì)高程值與標(biāo)準(zhǔn)值(設(shè)計(jì)值)十分接近,最大誤差保持在1 mm左右。如果采用多次測量取平均值的方法,其測量誤差可控制在更小的范圍,有望達(dá)到0.5 mm的測量精度。
4 有軌結(jié)構(gòu)微小形變檢測試驗(yàn)
為了探究FOG用于有軌結(jié)構(gòu)連續(xù)形變檢測精度,在模型橋H2截面放置一塊不銹鋼墊片(兩側(cè)梯度打磨),墊片輪廓圖見圖6。不銹鋼墊片的尺寸為長×寬×高=42.8 cm×12.8 cm×0.2 cm,在對(duì)全橋線形進(jìn)行測試時(shí),讓檢測小車平穩(wěn)地通過該不銹鋼墊片,進(jìn)而分析系統(tǒng)檢測微小形變的能力。

圖6 不銹鋼墊片輪廓圖
由于FOG輸出角速度信號(hào)隨著時(shí)間的推移呈發(fā)散性,考慮到待測結(jié)構(gòu)形變僅有毫米量級(jí),故需要采用一定的收斂算法來確保光纖線形系統(tǒng)檢測微小形變的能力。本文采用坐標(biāo)旋轉(zhuǎn)的方式,即將模型橋線形檢測的起點(diǎn)和終點(diǎn)進(jìn)行旋平約束,從而有效控制FOG帶來的發(fā)散性誤差。線形檢測小車測量全橋線形結(jié)果見圖7。
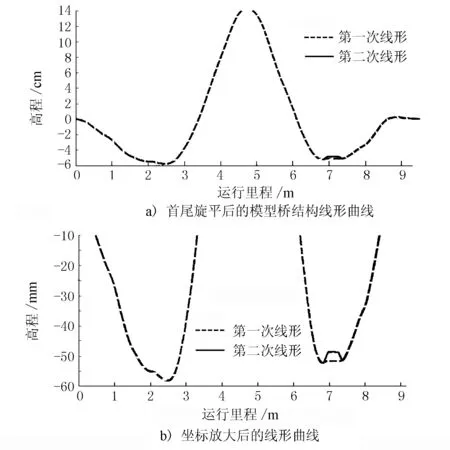
圖7 有軌結(jié)構(gòu)微小形變檢測曲線
由圖7可見,相對(duì)拱高達(dá)到22.7 cm的模型橋,厚度只有2 mm的墊片帶來的軌道結(jié)構(gòu)微小形變也能清晰測量,且局部線形與實(shí)際墊片形狀高度吻合。
在線形曲線上找到能夠表征墊片形狀的4個(gè)特征點(diǎn)A、B、C、D,見圖8。分析檢測小車經(jīng)過墊片時(shí)所測得墊片的線形曲線在水平和垂直方向的投影長度與實(shí)際墊片尺寸之間的關(guān)系。
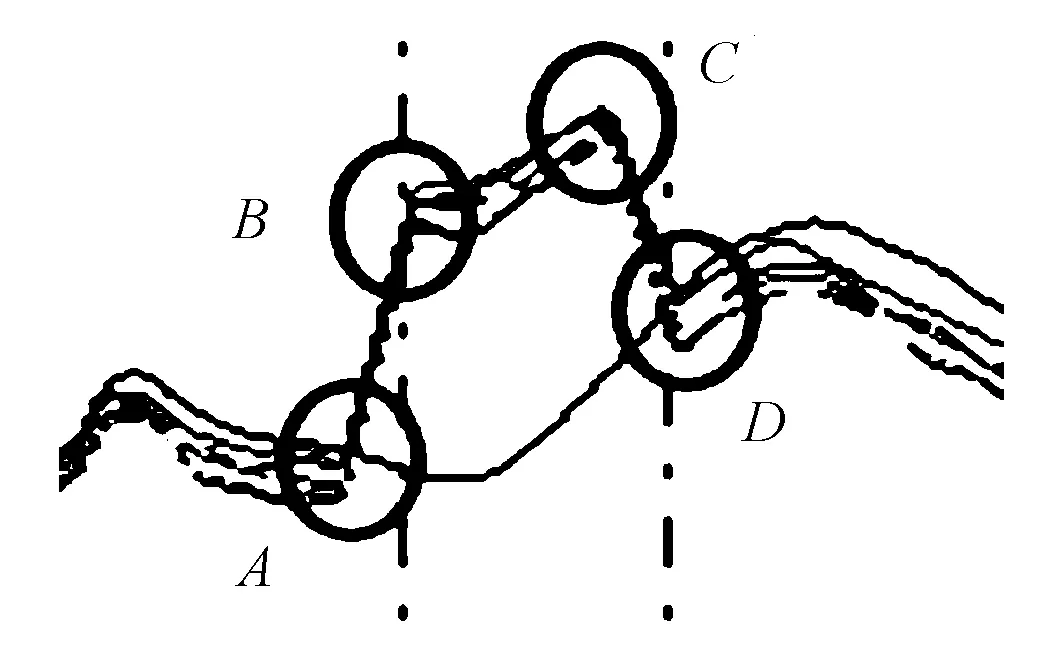
圖8 墊片在H2截面位置分布
由于A、B、C、D4點(diǎn)均為墊片局部極值點(diǎn),于是可以采用程序自動(dòng)尋優(yōu)方法在上述線形曲線中找到以上4點(diǎn)的坐標(biāo)值(X,Y),自動(dòng)尋優(yōu)后的坐標(biāo)值見表2。
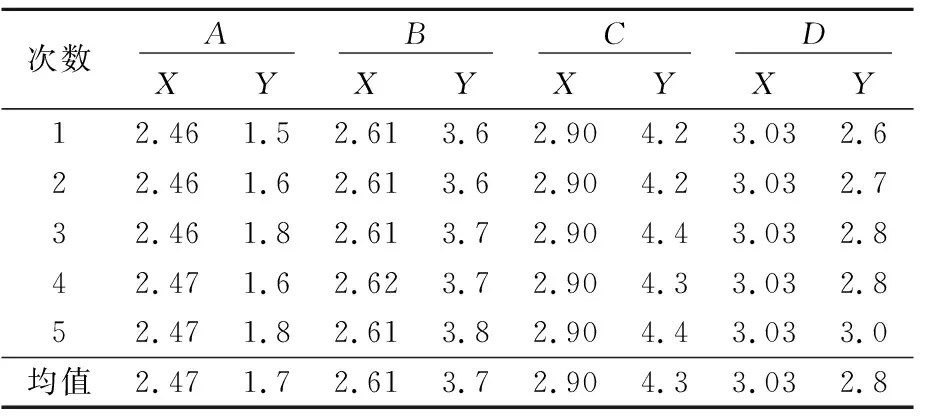
表2 H2截面墊片區(qū)域A~D 4點(diǎn)坐標(biāo)值
為了更深入地分析FOG形變檢測系統(tǒng)測量微小形狀的能力,根據(jù)表2可以計(jì)算出表3和表4所列舉的數(shù)據(jù)。
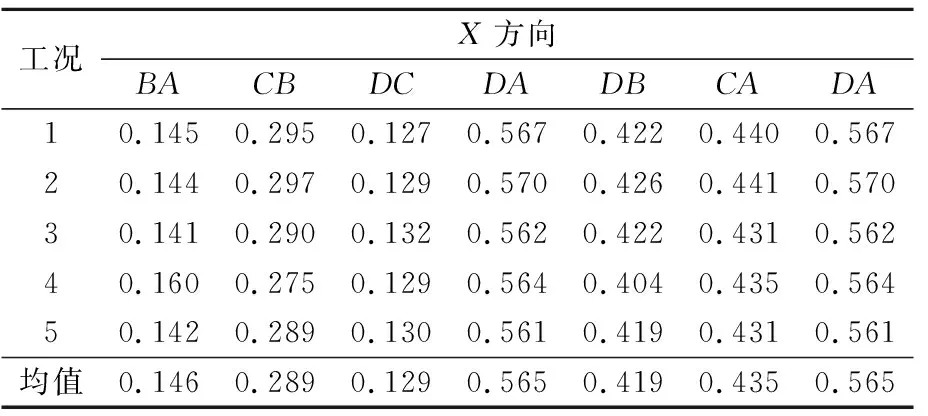
表3 H2截面墊片在水平方向測試值
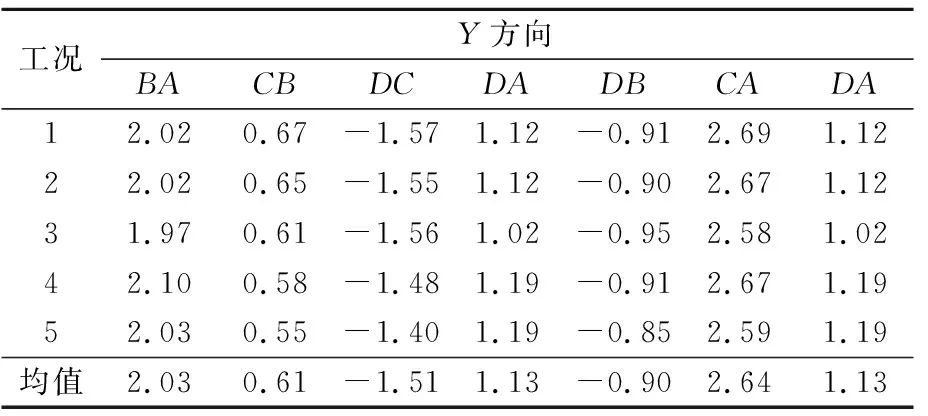
表4 H2截面墊片在垂直方向測試值
由表3和表4可知,線段CA和線段DB的平均值為42.7 cm,與墊片實(shí)際長度42.8 cm僅相差1 mm;線段BA的垂向距離為2.03 mm,與墊片實(shí)際厚度2 mm十分接近,偏差僅為0.03 mm。
綜上可知,線形檢測小車測量墊片長度與局部CA、BD段橫向距離均值相差甚小,多次平均后的均值更接近實(shí)際墊片長度;實(shí)際測量墊片厚度與BA段垂向投影距離十分接近。系統(tǒng)檢測有軌結(jié)構(gòu)微小形變測量精度達(dá)到了較理想的效果,其高程測量精度達(dá)到了0.1 mm。由此可見,F(xiàn)OG用于長度為9.5 m的有軌結(jié)構(gòu)連續(xù)形變檢測時(shí),其測量精度完全可以達(dá)到0.1 mm,具備檢測結(jié)構(gòu)微小形變的能力。
5 結(jié)語
基于有軌結(jié)構(gòu)測量的光纖陀螺形變檢測系統(tǒng)具有良好的重復(fù)性;對(duì)于有軌待測結(jié)構(gòu)表面存在的毫米級(jí)微小形變也能清晰識(shí)別;能夠準(zhǔn)確定位待測結(jié)構(gòu)發(fā)生形變的物理位置;對(duì)于長度為9.5 m的有軌模型橋,當(dāng)跨中拱高達(dá)到22 cm時(shí),其檢測精度可以達(dá)到1 mm;對(duì)于2 mm厚度的微小形變結(jié)構(gòu),通過植入收斂新算法,其測量精度可以達(dá)到0.1 mm,具備檢測微小形變的能力。
基于光纖陀螺的有軌結(jié)構(gòu)連續(xù)形變檢測系統(tǒng)可用于鐵路、隧道、橋梁、煤礦巷道及大型建筑物有軌結(jié)構(gòu)形變檢測,具有較為廣泛的應(yīng)用前景。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中華詩詞(2019年7期)2019-11-25 01:43:04
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12