基于微信小程序的地下停車場智能誘導系統設計
2021-05-08 04:06:40余江浩嚴曉波
中國新技術新產品 2021年4期
余江浩 王 林 張 乾 嚴曉波
(1.貴州民族大學數據科學與信息工程學院,貴州 貴陽 550025;2.貴州省模式識別與智能系統重點實驗室,貴州 貴陽 550025)
1 地下停車場管理系統發展
截至2020年底,我國汽車保有量超過2.81億輛,其中私家車保有量為1.89億輛,全國平均每100戶家庭擁有25輛私家車,北京、上海以及廣州等大城市每100戶家庭擁有超過50輛的私家車。由于公共停車位不足,因此占用道路停車成為普遍現象。“行車難、停車難”造成的交通擁堵與混亂,正成為社會關注、百姓關心以及政府亟需解決的焦點問題[1-3]。停車難這一“痛點”具有以下2種表現形式:1) 不知道哪個停車場有空閑車位。2) 即使知道某個停車場還有少量的空閑車位,但是進入停車場后,由于停放車輛太多,因此很難準確地找到空閑的車位。現有地下停車場管理技術需要在停車場埋設線路、傳感器等,成本高且不易推廣[4]。
2 基于微信小程序的地下停車場車位誘導系統
地下停車場智能誘導系統通過視頻圖像處理、模式識別、深度學習和移動支付等技術實現車位預定、車牌識別、車位檢測和地下停車場車位誘導等功能。基于視覺分析的智慧停車場在現有停車場視頻監控的基礎上,利用計算機視覺技術和Faster-R-CNN網絡方法自動檢測車位的狀態,實時準確地把車位的狀態信息傳送到云平臺上,平臺系統架構如圖1所示。

圖1 地下停車場平臺架構
2.1 地下停車場微信小程序子系統技術路線
與當前地下停車場管理系統相比,微信小程序具有實時、準確、便捷和界面操作友好等特點。小程序的開發包括以下5個步驟:1) 定義問題和撰寫需求分析報告。2) 設計小程序的整體功能架構,包括對系統框架、功能劃分和接口等進行設計。3) 設計小程序的系統細節,包括對車位檢測算法、數據結構和數據庫進行設計。4) 編寫代碼和單元測試。5) 部署和運行。
2.2 系統概要設計
地下停車場小程序的子系統主要分為6個功能模塊。具體的功能框架圖如圖2所示。

圖2 小程序子系統功能框架
2.3 各模塊主要功能
2.3.1 注冊登陸模塊
登錄微信小程序提示用戶授權并提供位置、微信賬號(姓名、性別)等信息。當用戶使用預定車位的功能時,提示用戶綁定車牌號等信息。
2.3.2 個人中心模塊
個人中心模塊具備個人預定信息列表和個人信息修改等功能。
2.3.3 查詢導航模塊
車主可以查詢目的地附近的停車場信息和車位分布情況,在確定停車場后就可以選擇導航至該停車場。
2.3.4 車位預定模塊
車主選擇停車場后,就可以進入預定車位界面,填寫并提交車牌號碼等信息,然后通過地圖導航至停車場,在停車場入口識別到車牌后,就進入地下停車場導航模式。
2.3.5 自動收費及反向尋車模塊
當車主預定車位超過15 min后,就開始按收費標準進行計費。為了讓車主快速離場,可以通過小程序調用微信支付接口實現自動支付。
3 基于深度學習的車位誘導系統實驗設計
3.1 地下停車場車位檢測方法
目前,地下停車場車位的檢測主要分為2類:1) 基于傳感器的傳統檢測方法,主要包括紅外線檢測方法、超聲波檢測方法、線圈檢測方法和地磁檢測方法。2) 基于視頻的圖像處理方法,主要包括基于直線的停車位檢測方法、基于角點的停車位檢測方法和基于深度學習的深度卷積神經網絡(DCNN)、卷積神經網絡結構的R-CNN、Faster R-CNN、Mask R-CNN等算法[5]。由于傳統檢測方法存在傳感器安裝要求高、壽命短、維護困難和成本高等劣勢;因此,該系統采用改進的Faster R-CNN網絡模型,該模型能夠快速地檢測車位的狀態,并實時識別車位的占用情況,如圖3所示。
3.2 車位預定功能
用戶登錄微信打開小程序并進入地圖搜索目的地的地下停車場,如果停車場有空閑車位就可以輸入車牌號碼預定車位,預定成功后進入導航界面,導航到目的地的地下停車場。當到達停車場入口時,自動識別車牌進入地下停車場,停車場導航屏幕實時顯示車主及車輛所處的位置,并幫助車主規劃最短路徑,顯示車牌并導航到預定的車位上,微信小程序上還會實時顯示地下停車場車位的剩余情況。
3.3 車位誘導功能
由于GPS技術無法滿足室內導航高精度的要求,因此該地下停車場采用基于攝像頭的車牌識別并結合誘導路徑規劃算法解決導航的問題。傳統的車位引導通過埋設傳感器在一定程度上解決了相關難題,但是傳統地下停車場導航系統傳感器鋪設、線路改造的成本很高,傳感器對場地的要求也較高,而且難以推廣,因此該系統在傳統地下停車場監控系統的基礎上,增加地下停車場關鍵路口和停車位的攝像頭,通過攝像頭將視頻上傳到云平臺,并利用深度學習算法對空車位進行實時檢測。當車主預定車位并進入地下停車場時,就可以進入地下停車導航模式,車主可以根據關鍵路口和小程序界面的提示導航至相應的停車位,后臺管理界面實時監控車位情況和車位的占用情況,并以地下停車場平面圖的形式顯示出來,云平臺實時監控和關鍵路徑上車牌的導航情況如圖4所示。
3.4 繳費功能
對車主來說,找到目的地的停車場后,可以完成車位預定、地下停車場車位誘導、反向尋車和出場繳費等操作,與傳統出場支付存在受信號影響的問題相比,該系統可以通過小程序的錢包功能自動扣費,繳費功能如圖5所示。線上支付提高了出場效率,簡化了支付流程。通過云平臺的統一管理,讓一些小區的剩余停車位得到綜合利用,通過車牌識別、車位預定和車位引導模塊真正實現了地下停車場無人值守。

圖3 某小區地下停車場車位上車輛檢測結果
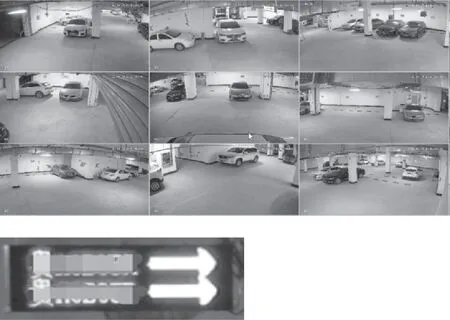
圖4 云平臺實時監控及關鍵路徑上車牌導航

圖5 繳費功能界面
4 實驗結果與分析
該系統提供了1種分布式、高效且可擴展的實時地下停車場停車位解決方案。由于系統采用深度學習的方法,因此對局部遮擋等干擾具有較強的抗干擾能力,并且具有良好的泛化性能。該系統使用1個平臺實時監控不同停車場的所有攝像頭。經過對實驗停車場在不同光照條件下進行測試,實驗結果表明,即使在部分遮擋的情況下,也有很高的準確率。測試結果還表明,基于卷積神經網絡算法對不同數據集的停車狀態進行預測具有良好的泛化能力。
5 結語
該文采用基于計算機視覺的地下停車場誘導系統在原有的地下停車場監控系統的基礎上,只需要通過有線網絡將大量的攝像頭數據傳輸到云平臺并進行實時處理。使用現有的監控系統攝像機,安裝成本較低,適用于地下停車場改造。
如果司機能夠實時掌握停車場的可用性信息,他們就可以調整自己的行程,不會因尋找車位而浪費時間。該系統能通過視頻圖像處理技術和地下停車場車位導航系統幫助車主高效地找到空閑停車位。對建設智慧城市來說,部署智能停車誘導系統可以減少司機尋找停車位的時間、減少城市環境污染、降低油耗以及減緩城市道路交通擁堵的情況,該系統還可以提高城市空閑停車位的利用率。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
人大建設(2019年12期)2019-05-21 02:55:44
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
中國科技論壇(2017年7期)2017-07-25 08:49:53
環球時報(2017-03-30)2017-03-30 06:44:45
中國信息化周報(2016年47期)2017-03-25 17:33:41
中國衛生(2015年3期)2015-11-19 02:53:32
中國信息化周報(2015年27期)2015-08-12 22:09:31
中國信息化周報(2015年28期)2015-08-06 22:08:50
中國信息化周報(2015年13期)2015-06-01 21:47:12
