基于變頻器的電潛泵智能系統(tǒng)及其控制方法
2021-05-08 04:06:48王傳鴻
中國新技術新產(chǎn)品 2021年4期
王傳鴻
(四機賽瓦石油鉆采設備有限公司,湖北 荊州 434000)
0 引言
電潛泵是1種在井下工作的多級離心泵,它與油管一同被放到油氣井液面以下。地面控制系統(tǒng)通過控制單元、升壓變壓器和動力電纜啟動電潛泵電機,使其帶動多級離心泵旋轉(zhuǎn),將油氣井中的井液舉升至地面。
電潛泵作為1種井下大排量、高揚程的井液舉升設備,它能廣泛應用于油井采油、氣井排水采氣等工況;特別是在排水采氣時,變頻電潛泵可以不受井深和井斜的限制,由于排量可調(diào),因此它可以用于作業(yè)的全生命周期,適合在高氣液比、高揚程的工況中應用,且有一定的處理固體顆粒的能力,能解決絕大多數(shù)的井下問題,因此得到了廣泛應用。
電潛泵最初采用定頻電機驅(qū)動,由于存在啟動電流大、不節(jié)能以及壽命短等缺陷,因此逐步改為變頻控制系統(tǒng),該系統(tǒng)具有啟動電流小、泵排量連續(xù)可調(diào)、可以避免電機頻繁啟停、節(jié)能以及可以延長電潛泵壽命等優(yōu)點。電潛泵工作深度較大、電纜較長且電壓壓降較大,采用變頻系統(tǒng)后,可以自動穩(wěn)定電機電壓,保證電機處于正常的工作狀態(tài)下,從而減少機組異常停機的次數(shù)。
電潛泵智能系統(tǒng)能夠?qū)﹄姖摫迷趩舆^程和生產(chǎn)過程中出現(xiàn)的異常情況進行監(jiān)控和自動處理,例如固體顆粒或者沉淀物堵塞電潛泵,造成電潛泵啟動困難或過載,增加了電能消耗;由于含氣量過高導致電潛泵抽吸不到井液;因系統(tǒng)工作不穩(wěn)定而產(chǎn)生氣鎖現(xiàn)象,從而導致電機溫度異常升高等[1];這時需要控制系統(tǒng)能自動針對異常情況進行反應和處理,如果遇到無法自動處理的復雜工況,系統(tǒng)還能夠提供遠程專家會診。
1 電潛泵智能系統(tǒng)整體設計方案
電潛泵智能控制系統(tǒng)由信號采集單元、電機控制單元、智能控制單元和云服務器單元組成,系統(tǒng)框架如圖1所示。控制系統(tǒng)實時采集井底泵組傳感器的信息,通過對比實際值和理論值之間的偏差,對變頻器進行實時調(diào)整,調(diào)整井下電潛泵的工作狀態(tài),消除實際值與理論值之間的偏差,維持電潛泵的正常運行,從而實現(xiàn)閉環(huán)控制。由于該系統(tǒng)是實時采集數(shù)據(jù),并對變頻器進行實時調(diào)整,因此大幅提高了系統(tǒng)的響應速度和控制精度,為電潛泵智能控制提供了有力的保障。
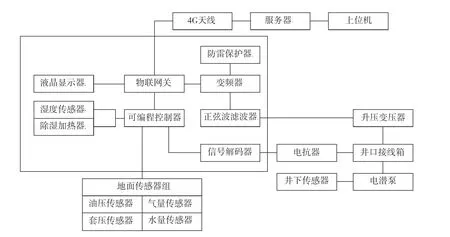
圖1 電潛泵智能控制系統(tǒng)
信號采集單元包括地面?zhèn)鞲衅鹘M和井下傳感器模塊。地面?zhèn)鞲衅鹘M可以對電潛泵的輸送管道參數(shù)和控制柜環(huán)境參數(shù)進行采集,包括油壓、套壓、氣量、液量以及環(huán)境溫濕度等信號,它們直接接入控制柜內(nèi)的可編程控制器[2]。井下傳感器模塊實際測量的數(shù)據(jù)以直流脈沖的形式通過動力電纜和電抗器傳送給變頻器控制柜內(nèi)的信號解碼器,經(jīng)過解碼后,變頻器控制柜內(nèi)的可編程控制器可以實時采集井下傳感器的數(shù)據(jù),井下傳感器數(shù)據(jù)包括泵入口壓力、泵出口壓力、井下溫度、電機溫度以及震動加速度等。
電機控制單元包括變頻器、正弦波濾波器、升壓變壓器以及電潛泵電機等。由于變頻器會輸出高頻諧波電流,且輸出的是PWM波,因此會增加升壓變壓器、動力電纜以及電潛泵電機的損耗,還會引起發(fā)熱并破壞絕緣;變頻器控制柜內(nèi)的變頻器輸出側(cè)接有正弦波濾波器,可以將變頻器輸出的PWM波轉(zhuǎn)換成正弦波,使用正弦波濾波器可以保護絕緣,延長變壓器、電纜和電機的壽命,減小電機軸承電流,增加傳輸距離,從而提高了系統(tǒng)的可靠性[3]。
智能控制單元包括可編程控制器、變頻器、信號解碼器、人機界面以及輔助電氣元件。可編程控制器編程實現(xiàn)了電潛泵的控制邏輯,用戶通過人機界面發(fā)布控制指令,實現(xiàn)電潛泵的啟停、調(diào)速、控制功能與參數(shù)設置。可編程控制器根據(jù)采集變頻器、地面?zhèn)鞲衅鹘M和井下傳感器實時反饋的數(shù)據(jù)來判斷電潛泵當前的作業(yè)狀態(tài),并根據(jù)實際需求調(diào)用可編程控制器內(nèi)部對應的啟動智能控制程序塊或者生產(chǎn)智能控制程序塊控制電潛泵作業(yè),從而應對電潛泵不同階段的使用工況,進而保證電潛泵處在正常工作的狀態(tài),同時還能降低電潛泵的能耗,延長它的使用壽命。
云服務器單元由物聯(lián)網(wǎng)關、云服務器以及上位機程序組成。物聯(lián)網(wǎng)關可以實現(xiàn)本地控制系統(tǒng)與云服務器之間的無線網(wǎng)絡數(shù)據(jù)通信,云服務器用于對數(shù)據(jù)進行實時采集與存儲,并向上位機程序提供網(wǎng)絡訪問接口。用戶可以通過上位機程序?qū)崿F(xiàn)對設備運行狀態(tài)的遠程監(jiān)控與專家支持。
變頻器控制柜主要包括變頻器、正弦波濾波器和控制系統(tǒng)等部分,如圖2所示。
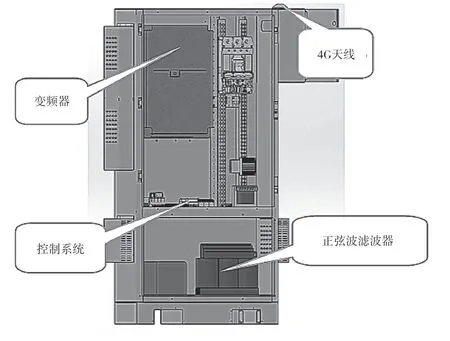
圖2 變頻器控制柜結(jié)構圖
控制柜控制系統(tǒng)主要由可編程控制器、人機界面、信號解碼器、物聯(lián)網(wǎng)關及其他電氣元件組成。可編程控制器還連接了濕度傳感器和除濕加熱器,可以實時檢測變頻器控制柜內(nèi)的濕度,當濕度超過限制后,就可以自動啟動除濕加熱器,避免對柜內(nèi)電控元件產(chǎn)生不利影響。控制柜還設有防雷保護器,防雷保護器和變頻器采用電性連接,從而防止雷擊的過電壓對變頻器以及控制系統(tǒng)造成損害,示意圖如圖3所示。
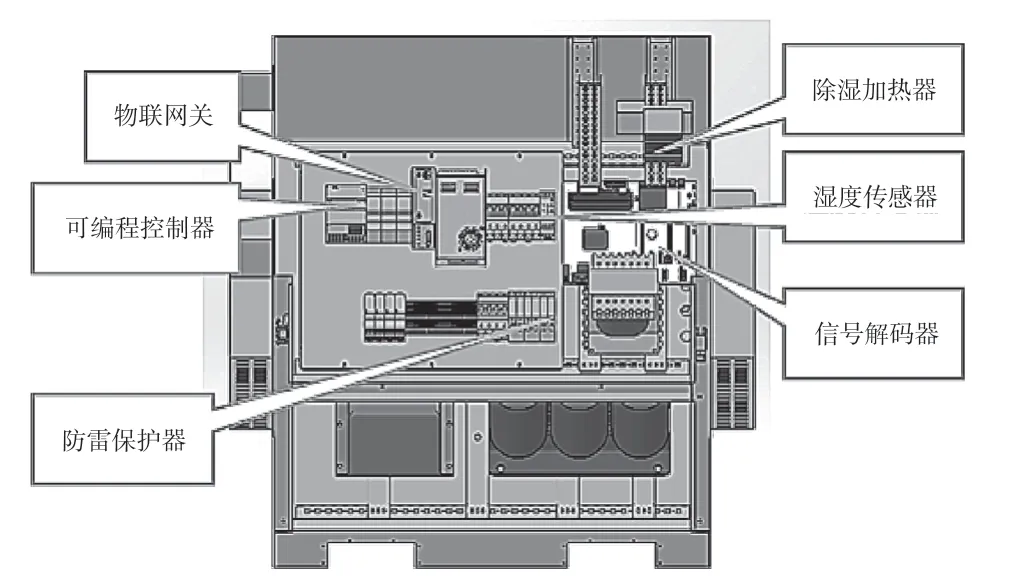
圖3 變頻器控制柜控制系統(tǒng)
2 智能系統(tǒng)控制方法
在電潛泵的啟動和生產(chǎn)過程中,經(jīng)常會因為井下生產(chǎn)環(huán)境發(fā)生變化,造成啟動困難、砂堵和氣鎖等異常情況,智能系統(tǒng)能根據(jù)實際運行狀態(tài)自動調(diào)用對應的智能控制單元對上述情況進行處理。
2.1 啟動智能控制
由于在電潛泵的啟動過程中,固體顆粒或者沉淀物可能會堵塞電潛泵,造成電潛泵啟動困難,因此系統(tǒng)會根據(jù)變頻器和傳感器反饋的數(shù)據(jù)自動調(diào)用不同的子程序處理單元,協(xié)助電潛泵正常啟動;自動提高啟動轉(zhuǎn)速子程序,當交流升壓變壓器將低電壓向中電壓轉(zhuǎn)換時,提高啟動轉(zhuǎn)速有利于提高功率傳輸?shù)男剩乐箚訒r出現(xiàn)升壓變壓器飽和的現(xiàn)象;系統(tǒng)可以自動提高啟動轉(zhuǎn)速,其主要設定的參數(shù)為初始調(diào)制頻率,該頻率以電潛泵的運行頻率為基準。
該子程序的參數(shù)包括啟動轉(zhuǎn)速、輔助啟動轉(zhuǎn)速、保持時間間隔以及輔助啟動電流等。
如圖4所示,電潛泵以低轉(zhuǎn)速啟動后,在保持時間間隔內(nèi)按照設定轉(zhuǎn)速運行,再自動將轉(zhuǎn)速調(diào)整至輔助啟動轉(zhuǎn)速上限,完成電潛泵的正常啟動流程。在保持時間間隔內(nèi),變頻器還可以按照系統(tǒng)輔助設定對輸給電機的電流進行控制。
電流脈沖啟動,當正常啟動流程運行結(jié)束且電潛泵沒有達到設定轉(zhuǎn)速時,系統(tǒng)能自動輸出一系列高電流脈沖,幫助電潛泵完成加速,直至達到設定轉(zhuǎn)速。電流脈沖啟動參數(shù)包括啟動電流占電潛泵額定電流的比例、脈沖個數(shù)、脈沖持續(xù)時長和循環(huán)執(zhí)行次數(shù);震蕩啟動參數(shù)包括振蕩次數(shù)、反轉(zhuǎn)頻率、反轉(zhuǎn)時長、正轉(zhuǎn)頻率、正轉(zhuǎn)時長和正反轉(zhuǎn)間隔時長。電流脈沖啟動工作的原理如圖5所示。
在使用過程中,可以通過調(diào)節(jié)脈沖的幅度與頻率來調(diào)整脈沖啟動的推力。在脈沖啟動流程完成后,如果仍然不能達到正常的轉(zhuǎn)速,系統(tǒng)就會再次調(diào)用自動提高啟動轉(zhuǎn)速子程序,從而完成電潛泵的正常啟動。
2.2 生產(chǎn)智能控制
生產(chǎn)過程中的電潛泵還會存在能耗大、溫度高的問題,系統(tǒng)會根據(jù)變頻器和傳感器反饋的數(shù)據(jù),自動調(diào)用不同的子程序處理單元協(xié)助電潛泵正常工作,因此設計了電潛泵生產(chǎn)智能控制程序,該程序包括能耗優(yōu)化子程序、過載或欠載保護子程序和回轉(zhuǎn)轉(zhuǎn)速監(jiān)測子程序,生產(chǎn)智能控制程序構架圖如圖6所示。
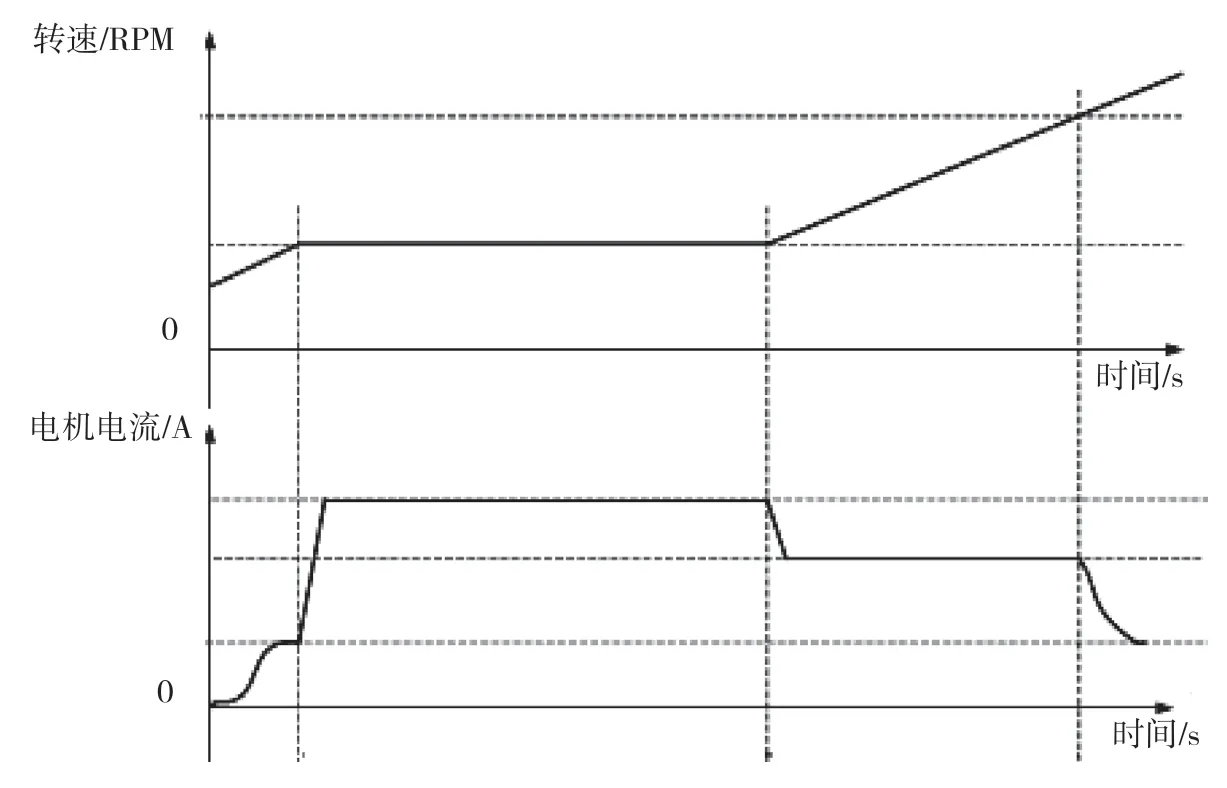
圖4 自動提高啟動轉(zhuǎn)速子程序原理圖
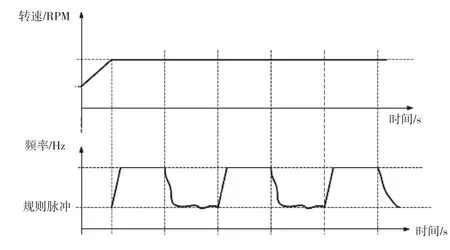
圖5 脈沖啟動子程序原理圖
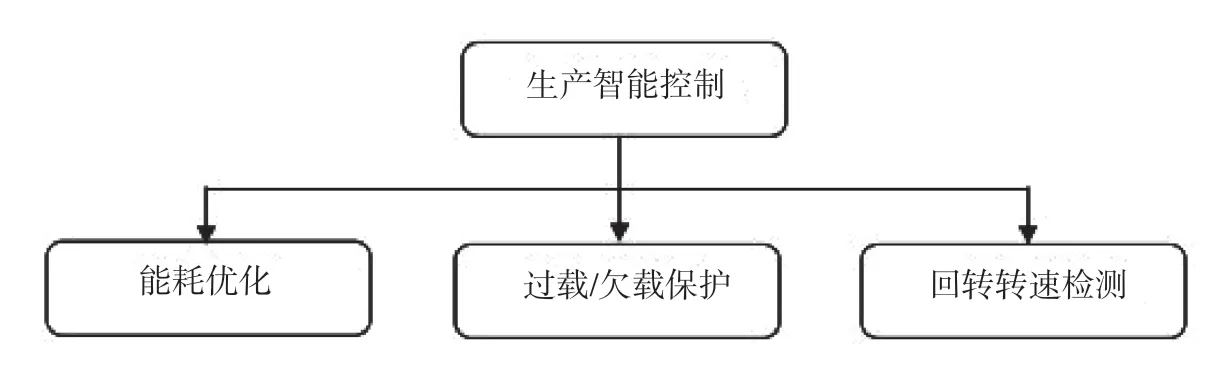
圖6 電潛泵生產(chǎn)智能控制程序
生產(chǎn)智能控制程序主要由能耗優(yōu)化、過載/欠載保護和回轉(zhuǎn)轉(zhuǎn)速監(jiān)測3個功能模塊組成。
2.2.1 能耗優(yōu)化
能耗優(yōu)化模塊可以在負載發(fā)生快速變化時及時對電潛泵的運行狀態(tài)進行干預,并根據(jù)實際負載自動調(diào)整變頻器異步電機矢量控制模型的磁通給定控制器,通過修改控制器磁通絕對值來改變電潛泵的磁通參數(shù),優(yōu)化電潛泵的電流,從而減少電能消耗,降低電潛泵的工作溫度,延長設備的使用壽命[4];由控制程序生成的電機估值電流能給變頻電機提供穩(wěn)定可靠的實時機械負載指示。
2.2.2 過載或欠載保護
通過設定負載曲線,可編程控制器實時監(jiān)測電潛的工作頻率,判斷系統(tǒng)的負載狀態(tài)。當運行中出現(xiàn)過載或欠載的狀態(tài)時,變頻器會按照用戶設定的處理方式(不做處理、警告、警告并停機、故障跳閘以及智能處理)來進行后續(xù)處理,使系統(tǒng)盡快脫離過載或欠載的狀態(tài),該功能可以有效保護設備的長時間穩(wěn)定運行,使設備在安全與生產(chǎn)效率之間達到平衡。
負載監(jiān)控在一定的電機轉(zhuǎn)速或頻率范圍內(nèi)是有效的。標量電機對應的是頻率范圍,其他類型的電機對應的是轉(zhuǎn)速范圍,該范圍的設定包括5組參數(shù)(欠載載荷、過載載荷),其設定值都為正值。
2.2.3 回轉(zhuǎn)轉(zhuǎn)速監(jiān)測
在生產(chǎn)停止或者中斷時,可編程控制器啟用回轉(zhuǎn)轉(zhuǎn)速監(jiān)測,只有當回轉(zhuǎn)轉(zhuǎn)速為0或者低于安全值時,電潛泵才能重新啟動。
回轉(zhuǎn)轉(zhuǎn)速監(jiān)測功能可以實時監(jiān)測電機的實時轉(zhuǎn)速,防止由于液柱異常回流造成電潛泵異常反轉(zhuǎn)。在該功能運行時,電機必須處于停機狀態(tài)。回轉(zhuǎn)轉(zhuǎn)速監(jiān)測能有效防止因意外重啟而產(chǎn)生的葉輪附著,并且減少了下次重啟的時間,從而提高了生產(chǎn)效率。
3 云服務器單元
電潛泵智能控制系統(tǒng)還通過物聯(lián)網(wǎng)關、4G天線、服務器和上位機程序?qū)崿F(xiàn)對電潛泵的遠程實時監(jiān)控。操作人員通過上位機程序訪問云服務器,可以遠程監(jiān)控電潛泵的運行狀態(tài)與運行參數(shù),對現(xiàn)場施工進行指導,從而保證現(xiàn)場端設備的穩(wěn)定正常運行。在確保現(xiàn)場無線網(wǎng)絡通信條件穩(wěn)定、實時的條件下,可以實現(xiàn)電潛泵遠程智能控制與無人值守,極大地降低了人工成本。
4 結(jié)語
該文以變頻器、可編程控制器為電氣主體,完成了對各單元模塊的設計,并對單元模塊的組成及功能進行了詳細說明。該智能系統(tǒng)有效地解決了電潛泵在生產(chǎn)過程中遇到的主要異常工況,降低了設備運行能耗,為操作人員提供了更具智能化的操作方式,具備較好的實際應用價值和市場應用前景。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(2020年3期)2020-11-06 09:07:42
文苑(2018年23期)2018-12-14 01:06:06
測控技術(2018年5期)2018-12-09 09:04:50
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
