基于物聯網的火場人員救助方法與實驗*
2021-05-08 06:10:50胡宇虹
通信技術 2021年4期
關鍵詞:信息
張 勤,胡宇虹
(華南理工大學,廣東 廣州 510641)
0 引言
隨著社會城市化進程加快,高層建筑大量涌現,建筑的高層化,結構的復雜化,給建筑消防帶來了新的挑戰。如何快速地應對火災,減少二次災害,保證財產和生命安全是消防救援工作的重要課題。
目前的人員救助方法主要有消防人員通過消防設備救援,直升機救援,通過逃生裝備自救,以及機器人救援等方式實現人員救助。其中最常見的救援方式是消防員實地救援,消防人員收到火警,抵達火場,搜查被困人員,對被困人員實施救援。對被困人員的定位局限于大聲喊叫、揮動毛巾和消防員實地搜救等原始方式,救援風險較大,容易造成二次災害。直升機救援對建筑要求較高,僅適用于樓距較大,樓頂開闊的樓盤。隨著機器人技術的發展,消防機器人不斷出現,日本研制出一種復合型吊艙式機器人系統[1],通過吊艙上配備的紅外線攝像和玻璃切割等裝置,實現信息采集和人員救助。文獻[2]提出了SIRIUSC系列的機器人,通過高層建筑頂層的提升機構和水平移動機構,機器人可以實現縱向和橫向的快速移動和越障等功能。文獻[3]提出高層救生艙系統,當火災發生時,被困人員通過逃生艙快速安全到達安全地點。但無論哪種救援方法,都需要預先知道被困人員和火災現場情況,才能實現有效的救助。
被困人員位置分布和火災現場信息是消防救援決策的重要依據,也是實現快速、有效救援的保證。針對這個問題,國內外學者開展了一些前瞻性研究,并取得了一定的成果。
在火場信息采集方面,為確定人員分布,文獻[4]提出了一個基于傳感器驅動和情景感知計算的平臺,通過定位移動人員攜帶的小型傳感器標簽,監測人員可以獲得移動人員的準確位置和動態模型;文獻[5]提出使用遠程射頻識別標簽跟蹤人員的動態位置,并搭建疏散中心信息集成系統,一旦檢測到某個人員的動態位置,疏散中心信息集成系統將該位置發送到救援隊,以實現快速救援。文獻[6]利用具有時空地理信息系統(Geographic Information System,GIS)功能的移動機器人進入火場,通過機器人配備的多種傳感器,實時勘測人員位置。文獻[7]提出采用基于接收信號強度(Received Signal Strength Indication,RSSI)技術的定位系統,確定被困人員的位置。
在確定著火點位置以及火勢發展上,主要借助各種傳感器,感知煙霧、溫度等著火點信息[8-10]來實現。
在高層建筑火災的救援路徑規劃方面,國內外學者提出最短路徑規劃算法、群智能仿生算法、機器學習等思想來解決這一問題。在最短路徑規劃算法方面,文獻[11]采用路由信息協議(Routing Information Protocol,RIP)中的路由(Digital Video,DV)算法,借助路由轉發機制,實時計算最優逃生路徑。文獻[12]基于弗洛伊德(Floyd)算法,提出可以進行動態調整以及及時反饋的最優路徑。文獻[13]基于改進A星(A-Star,A*)算法,提出了一種效率更高的多起點、多出口的路徑規劃算法。在群智能仿生算法方面,文獻[14]提出環境障礙閾值和安全代價函數,為火災環境下A*算法和蟻群算法的選用提供參考。文獻[15]基于改進的自適應果蠅算法,進行節點和路徑容量受限情況下的動態疏散路徑規劃。文獻[16]針對大型公共建筑的疏散規劃,提出基于神經網絡的動態路徑規劃方法,其運行速度比傳統算法快8~10倍。此外,文獻[17]提出基于火災相關產物影響條件下的人員疏散速度模型,可以真實反映火場中的疏散效果。文獻[18]針對火災動態擴散過程提出基于漣漪擴散算法(RSA)的協同進化路徑優化方法(Co-Evolutionary Path Optimization,CEPO),避免出現被困人員繞遠現象,有效提高火災疏散效果。
縱觀國內外高層救援的現狀可以看出:
(1)目前高層建筑人員救助系統主要是被動救援方式,消防人員或者機器人收到火警到達火災現場后才開始搜救,也就是說消防響應時間內,被困人員處于等待或者隨機的自救中,容易錯過最佳逃生時間;
(2)救助人員與被困人員信息交互匱乏。火災現場煙霧彌漫,由于缺少信息交互的渠道,造成搜救時間過長,逃生方向不明等混亂狀態。
為了解決上述問題,本論文提出基于物聯網的高層救援路徑規劃方法。基于物聯網,建立了消防救助人員、被困人員、指揮人員、應急設施等全方位、多通道的信息采集反饋與交互系統:被困人員通過手機等終端反饋位置信息,控制中心根據火災現場信息、天氣信息、被困人員位置信息規劃安全逃生路徑,發出救助指令,指揮被困人員逃生;基于信息融合和蟻群算法,快速定位個性化救援目標,完成快速救援最優安全路徑的規劃。提出的人員救助方法,可最大限度地縮短救援時間,有效利用消防應急響應時間,實現被困人員的救助。
1 人員救援系統的構成與救援方法
高層人員救援系統由信息采集、通信系統、智能指揮控制中心、人員救助系統組成。信息采集系統通過電腦、手機等物聯網終端、煙霧傳感器、緊急按鈕和監控等多種監測方式,收集建筑物內部的信息。一旦發生火情,立即將火警信息發送到建筑內數據庫中每個人的移動終端。通過人員反饋回來的信息,收集被困人員的位置信息,并實時發送到智能指揮控制中心。交通、醫療和消防中心等外部公共信息通過網絡實現共享,在消防信息采集系統實現信息融合和交互通信。通信系統建立被困人員。消防人員、救生艙等應急設備之間的聯系與交互。智能指揮控制中心根據火災現場信息、被困人員位置信息以及天氣等信息規劃安全快捷的逃生路徑,發出救助指令給被困人員,指導逃生方法,同時調動人員救助系統完成人員救助。智能指揮控制中心系統有自主模式和人工干預模式。自主模式用于消防響應時間內的救助,一旦發生火警,立即根據信息采集系統的信息進行綜合評判,生成逃生和救援路徑,指揮被困人員和救助系統行動;人工干預模式是消防響應后,也就是專業消防人員到達火災現場后,根據現場信息,綜合判斷,參與救援路徑的規劃。人員救助系統由救生艙及其附件組成,救生艙平時放在樓頂處于休眠待命狀態,一旦發生火災,可以立即激活。救生艙在樓頂可以沿導軌做平面移動,通過吊艙沿垂直方向移動,實現救生艙的空間移動,根據指揮系統生成的最優救援路徑實施人員救助。人員救助方法分為集體救助和個性化救助,指揮中心根據火場分布,房間布局,易燃品、危險品分布,風向風速等信息確定個性化逃生路線,被困人員根據指揮中心反饋回來的樓層逃生路線指引,前往指定樓層避難地或者指定地點乘救生艙逃生;對于無法到達指定避難地點進行集體逃生的被困人員,按照救援指引在原地等待或者到達指定位置,救生艙根據個性化救援的人員信息,基于蟻群算法生成安全最優救援路徑,救生艙依順序將各樓層的被困人員載離。人員救助過程如圖1所示。
救援路徑規劃軟件系統是基于服務器—客戶機(Client-Server,C/S)架構開發,由Mysql數據庫、Tomcat服務器、客戶端App組成,包含火警推送模塊,被困人員信息采集模塊,火災信息融合模塊,救援策略和路徑生成模塊,救援人員干預救援模塊。
信息采集與交互是制訂救援方案的依據,也是實時救援指導的保證。基于物聯網的消防信息采集系統針對以太網形式的 WiFi 局域網環境,構建嵌入式 Web 服務器,設計了被困人員定位信息采集和交互通信等功能的具體實現方案。一旦有火警,被困人員手機立刻會收到預警推送提示,可以通過手機等移動終端提供被困位置信息給信息采集系統,并實時接收指揮中心反饋回來的救援引導信息進行逃生,從而極大縮短救援等待時間,增加逃生幾率。消防人員也可以通過手機等移動終端登錄救援頁面,可查看系統收集到的被困人員位置和分布信息,掌握被困人員情況,干預制定消防策略,實現被困人員和消防人員的雙向交互通信。
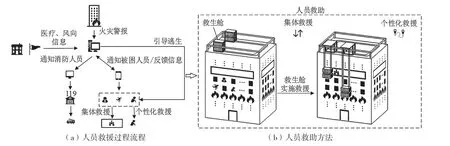
圖1 人員救助系統
2 基于蟻群算法的個性化救援
2.1 人員救助路徑優化模型的建立
在保證安全的前提下,被困人員的等待時間、救援路徑的長度直接影響救援效率。首先以被困人員平均等待時間最短f1作為優化條件,篩選救援目標,然后由救生艙最短路徑f2進一步優化救援路徑,最后考慮著火點、危險區域、火勢走向等確定最優安全路徑。
建立救援界面坐標系xoy,如圖2所示。設高層建筑中有n個求救位置并對其進行順序編號,在人員救助路徑中對應求救位置編號i的位置序號為ri,即ri=1,2,…,n(i≤n),每個求救位置處的等待救援人數為pi(i≤n),則需要確定一條人員救助路徑r=(r1,r2,…,rm)(m≤n),使得救生艙從起始點出發經過m個求救位置后最終到達安全點,保證每個位置序號ri(i≤m)處的求救位置只經過一次。
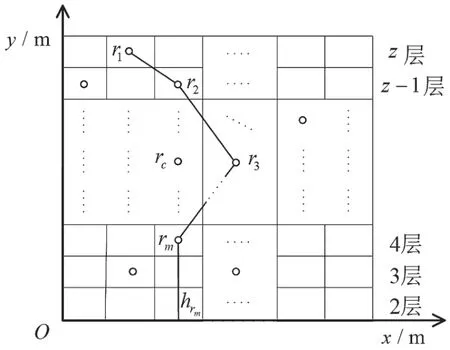
圖2 人員救助路徑
建立平均等待時間數學規劃模型:
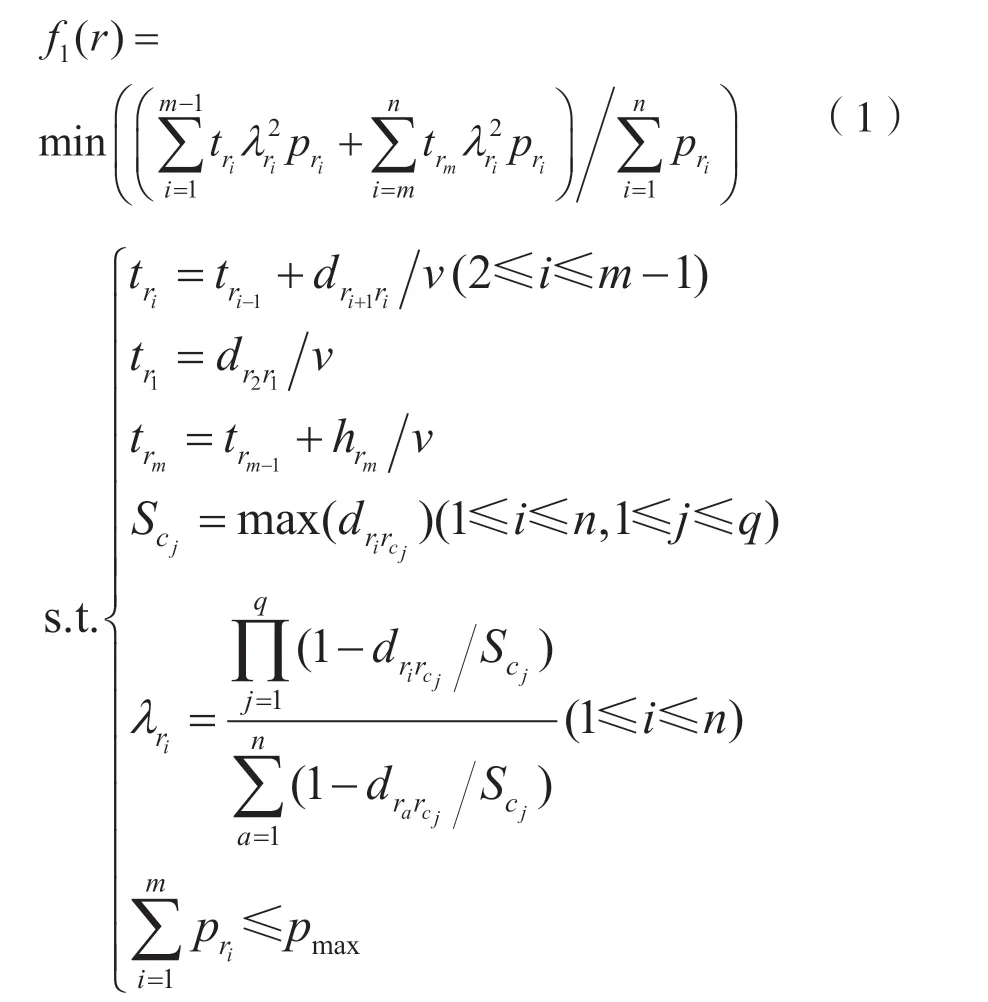
式中,tri表示在人員救助路徑中位置序號ri處被困人員需要等待的時間;λri表示位置序號ri在路徑中相對危險位置的重要程度,即權重;pri表示位置序號ri處的被困人員數量;表示人員救助路徑上所有被困人員的等待時間之和;表示人員救助路徑之外的所有被困人員的等待時間之和;表示高層建筑中所有被困人員的數量;dri+1ri表示求救位置ri+1ri間的距離;v表示救生艙運行速度;hrm表示最后一個人員救助路徑上的位置序號到地面的高度;trm既表示人員救助路徑中位置序號rm處每個被困人員需要等待的時間,同時也是人員救助路徑之外的位置序號處每個被困人員的等待時間;q表示火源位置和存放危險易燃物質位置數量之和,其中危險位置序號為cj;表示各個求救位置與火源之間的距離。將相對權重進行歸一化處理和累乘即可得到Scj表示中的最大值。由于救生艙等消防設備的承載能力有限,出于安全性考慮,一條人員救助路徑上救援的被困人員數量不能超過其最大承載量,其中pmax表示最大承載量,此時共有m個救援位置。
經過f1生成最短平均等待時間路徑后,通過最短路徑模型f2進行進一步優化,獲得經過危險位置點的最短救援路徑。建立路徑最短數學規劃模型:

考慮著火點周圍熱場,危險點周圍的不安全因素,以及風向、煙囪效應對火勢蔓延的影響,確定危險區域,確保救助路徑安全。
假設著火點等危險區域的熱場初始半徑為R(R根據火勢確定)。設風向向量為e,火災煙囪效應對危險半徑影響為豎直方向的向量h,火災危險區域在e方向上的最大值為KeR,在h方向上的最大值為KhR,Ke、Kh分別根據救援現場風速和著火點的火勢確定,可以確定危險區域范圍,如圖3所示。
假設A、B為求救位置,從A到B實施救援時,要繞開危險區域。分別經過A、B點對二次曲線作外切線,通過對比的大小可選出避開危險區域該段路程最小值的最優安全路徑。
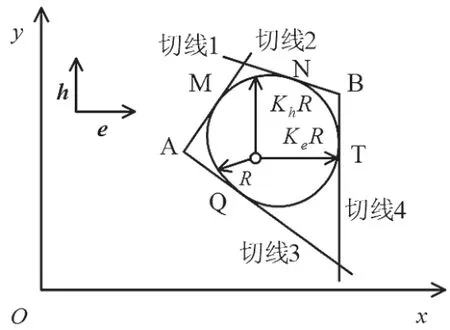
圖3 最優安全路徑生成
2.2 基于蟻群算法的模型求解
采用蟻群算法求解人員救助路徑數學模型,分成三個模塊。首先考慮路徑長度,被困人員數,著火點影響,基于人員最短等待時間模型f1篩選救援位置r=(r1,r2,…,rm)(m≤n);然后基于最短路徑模型f2,獲得經過篩選出的救援位置的最優路徑;最后考慮風向風速和危險位置避開危險,獲得最優安全路徑。求解過程的流程如圖4所示。

圖4 蟻群算法尋優人員救助路徑流程
3 仿真驗證與實驗
3.1 仿真驗證
為了驗證提出算法的可靠性,基于Matlab進行仿真分析。
假設建筑有15層,著火點在1106房間,505房間內有危險品,救生艙的最大承載人數為18人。為了節約時間,首先將救生艙從樓頂移動到著火點的上方。由仿真軟件隨機生成的求救位置數量n為30,每個求救位置隨機分布被困人員,如圖5所示。圖5中的小圓圈代表求救位置,數字代表該位置被困人員數量,黑色實心點、灰色實心點分別代表著火點和存放危險品房間的位置。根據蟻群算法的參數最優選擇原則[19-20]設置Matlab模擬仿真參數螞蟻數量k=13,信息啟發式因子α=1,期望啟發式因子β=5,信息素揮發系數ρ=0.1,信息素總量Q=100。通過100次迭代,在基于人員最短等待時間救援路徑模型f1得到的m個救援位置上,再通過f2篩選出救援位置的最短路徑,如圖5(a)中的實線所示。在救生艙救援人數有限的情況下,在第一次救援中優先前往危險程度高,被困人員數量多的求救位置。
考慮著火點、危險點的安全范圍和風向,對生成的救援路徑進行優化,生成的最優安全救援路徑如圖5(b)所示。可以看出,生成的最優安全救援路徑與人工救援方法非常相似,證明了蟻群算法求解得出的最優路徑及其最優目標函數值的合理性。

圖5 救援路徑的仿真結果
3.2 救援響應時間實驗
實驗地點為華南理工大學的汽車科技大樓,該樓為L型結構的15層建筑。實驗成員為50名,每人攜帶一部安裝了高層救援路徑規劃軟件客戶端App的手機,50名成員隨機分布在建筑內的某層的隨機房間中。通過實驗測試系統的救援響應時間,也就是測試由推送平臺發送火警通知電話到手機終端,50名實驗成員接收到火警后,反饋回自己的位置及安全信息,然后收到控制中心發送的個性化救援指導方案所需要的時間,每組實驗重復20次。實驗結果表明,在局部網環境、網絡速度65 Mb/s情況下,火災預警到達率為100%,由火警通知發出,到50名人員反饋信息到數據庫的平均時間為27.92 s;控制中心生成最優安全路徑并反饋給被困人員平均時間為1.5 s,也就是說,整個救援響應時間為29.42 s,與現有的消防系統收到報警、出警、到達現場至少5 min消防響應時間相比大幅度降低。圖6為高層救助系統手機App的工作界面。由此可見,通過被困人員、消防人員之間的信息融合與交互,救援實時性強,救助更加有序,減少了救援盲目性,大大減少了救援時間。
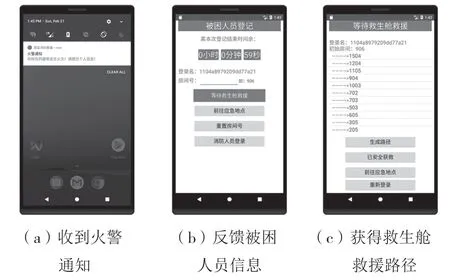
圖6 手機App頁面
4 結語
(1)提出基于物聯網的火場人員救助方法,基于多通道的信息采集、融合、決策、反饋機制,將主動救援和被動救援相結合,可以大大縮短消防響應時間,提高逃生幾率。特別是對于高層或者超高層建筑的救援,消防車能力達不到的情況下,救援效果更加顯著。在實驗室條件下,從火警通知發出,到被困人員收到逃生指引所需要的平均時間僅為30 s,火警預警電話送達準確率達到100%,滿足信息響應的準確性和實時性要求。
(2)本文建立了人員救助路徑優化模型,提出了基于蟻群算法的個性化救援路徑規劃方法,并通過仿真證明了提出算法的可靠性。
(3)安全救援路徑的規劃與建筑的內部結構、人員分布、易燃易爆品的存儲情況等密切相關。根據這些信息需要事前構建數據庫,完備的數據庫是實現安全救援路徑規劃的重要保證。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32