基于深度學習的機器人目標檢測設計
2021-05-12 02:59:42余佳恩馬國軍任永恒王亞軍
電子設計工程 2021年8期
余佳恩,馬國軍,任永恒,王亞軍
(江蘇科技大學電子信息學院,江蘇鎮江 212003)
室內機器人在移動過程中,需要感知周圍環境,以進行目標檢測和路徑規劃。常用的傳感器有激光雷達、超聲波和紅外傳感器等,為獲得較多的信息,視覺傳感器也廣泛應用于機器人目標檢測。
機器人目標檢測方法是將提取的目標圖像特征轉化為特征向量,利用分類器進行分類[1-2],同時用滑動窗口對目標定位,找到與目標特征最相似的位置。
隨著人工智能技術的不斷發展,基于深度學習的目標檢測算法逐步被應用,并成為研究熱點。基于區域建議的算法先對可能存在的目標區域進行大量的建議,構成候選目標,然后進行識別,得到檢測結果,如Faster R-CNN 系列檢測算法[3-4],但該類算法存在處理數據速度慢,對候選區域進行處理時有大量的重復計算等問題。基于回歸學習的檢測算法能夠一步完成檢測過程,如YOLO 在去除區域建議的過程中[5],直接利用卷積神經網絡(Convolutional Neural Networks,CNN)對整幅圖像進行處理,預測出目標的位置和類別,該方法雖然提高了運算速度,增加了實時性,但其定位的準確性較低[6]。
基于此,文中設計并研究了基于MobileNet-SSD模型的目標檢測方法,并且輸出機器人到目標障礙物的距離。該方法使用MobileNet 網絡作為SSD 的基礎網絡進行特征提取,將檢測到的目標投影到深度圖中,同時計算包圍盒內的深度平均值作為障礙物到機器人的距離。
文中融合計算機視覺和深度學習的方法,進行機器人障礙物目標全自動檢測,并得到距離信息,為機器人避障、路徑規劃提供基礎。
1 MobileNet-SSD目標檢測
1.1 MobileNet
目前,為得到較高的準確率,CNN 的深度逐漸增加,復雜度逐漸增強[7]。但是,硬件資源的限制使得巨大且復雜網絡模型在嵌入式設備上無法實際應用。針對CNN 存在的問題,Google 于2017 年發布了MobileNet 卷積神經網絡模型[8]。
MobileNet 采用深度可分離卷積[9]代替普通卷積,為每個輸入通道提供單獨的濾波器,使用點卷積結合所有輸出的深度卷積,使計算量大大減小,標準卷積分解為可分離卷積的示意如圖1 所示。
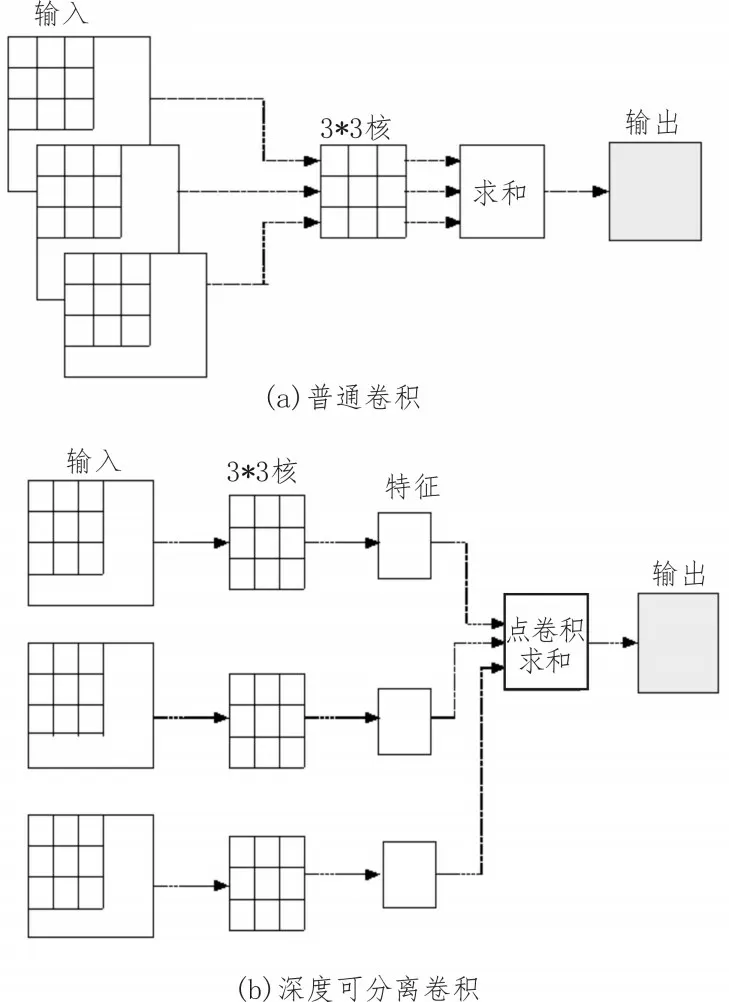
圖1 普通卷積和深度可分離卷積
1.2 SSD目標檢測算法
針對R-CNN 系列檢測算法處理數據速度慢,YOLO 類算法定位準確率低的問題,文獻[10]提出了SDD 算法。與兩階段目標檢測算法相比,SSD 采用端到端的方法和金字塔式的多尺度特征層,具有實時性好、結果準確的特點。
SSD 算法以VGG16 為基礎網絡,通過增加4 個卷積層獲得更多的特征圖。通過多尺度特征信息和待檢測圖像的大小信息,生成候選框位置和置信度。在輸出層,利用非極大值抑制算法((Non-Maximum Suppression,NMS)去掉無效的候選框,將候選框和標注框進行匹配,從而得到目標的信息,包括位置、類別和置信度[11-13]。
SDD 由基礎網絡和輔助網絡組成。輔助網絡在VGG-16 的基礎上增加用于目標檢測的卷積層,其目標檢測步驟如下:
Step1:初始化,載入模型進行網絡訓練;
Step2:提取部分圖像區域,構造候選框;
Step3:計算置信度,置信度值越大,準確性越高;
Step4:輸出置信度和物體在圖像中的位置。
1.3 MobileNet-SSD目標檢測流程
利用RGB 相機獲取場景的彩色圖像,利用MobileNet-SSD 進行障礙物檢測并構建目標包圍盒;然后,利用左右兩個紅外相機獲取場景的深度圖像,將RGB 彩色圖像和深度圖像融合配準,得到RGBD圖像數據;最后,將目標包圍盒投影到深度圖中,并輸出目標的類別和距離。具體流程如圖2 所示。

圖2 MobileNet-SSD目標檢測流程圖
2 RGBD圖像配準
圖像配準是將多個傳感器從不同視角獲得的多幅圖像,在同一場景下尋找幾何上的對應關系。
圖像配準可分為基于區域的配準和基于特征的配準兩種方法[14]。基于區域的配準方法[15]由事先定義好尺寸的窗口來進行相關性估計。比較典型的算法有相關算法、傅里葉算法和互信息算法。
基于特征的配準方法[16]是對不同圖像中提取的特征,如點、線特征進行關聯,因而對圖像的旋轉、平移和尺度變換等具有不變性。
在深度圖像配準中,由3D 相機獲得的圖像包括深度圖像和彩色圖像。由于深度相機和彩色相機的位置不同,因而需要通過配準,將深度圖像坐標系轉換到彩色圖像坐標系下,使得深度圖像和彩色圖像融合,得到配準深度圖像。
設3D 相機的左側相機為深度相機,右側相機為彩色相機,深度圖像配準到彩色圖像的過程由式(1)描述:
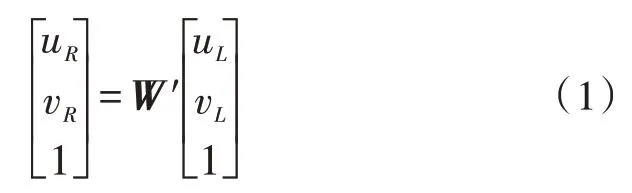
其中,W′為變換矩陣,(uL,vL,zL)T為深度圖像的像素坐標,(uR,vR,zR)T為彩色圖像的像素坐標。
變換矩陣W′的構造過程如下:
1)構造深度相機坐標系到圖像坐標系的變換,由攝像機標定原理可知,相機坐標到圖像坐標的變換為:

于是,圖像坐標系到相機坐標系的變換為:

其中,LR為雙目相機標定的左側相機內參矩陣。
2)同理,構造右側相機坐標系到圖像坐標系的變換:
其中,RR為雙目相機標定的右側相機內參矩陣。
3)左側相機坐標系到右側相機坐標系變換為:
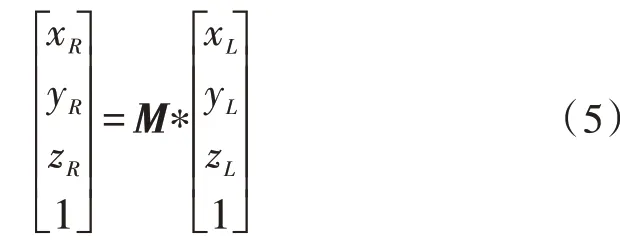
其中,M為兩個相機光心的外參矩陣。
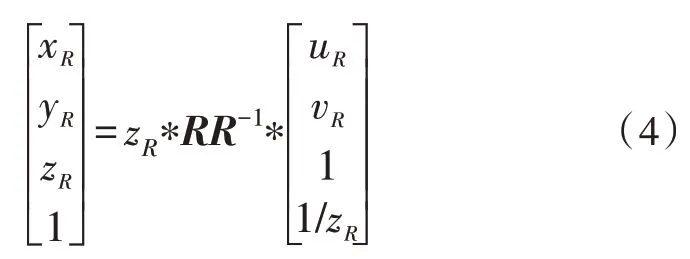
4)左側圖像坐標轉換到右側圖像坐標系,并左乘RR矩陣得到:

此時,根據深度圖像和彩色圖像中像素的坐標,可以得到配準深度圖像中的像素坐標。
3 實驗結果與討論
研究中的軟硬件實驗平臺為PC 端,操作系統為Ubuntu16.04,計算機配置為Intel 酷睿4 核CPU,內存為8 GB,框架使用TensorFlow 深度學習框架,使用的視覺相機是Intel RealSense D435i。
Intel RealSense D435i 可用于室內外的視覺檢測與導航,最大測距為10 m,與光照、場景、校正有關。圖像傳感器采用全局快門,每個像素大小為3 μm ×3 μm,深度相機最小測距為0.105 m,視場深度為(87°±3°)×(58°±1°)×(95°±3°),深度輸出分辨率最大為1 280×720,幀率為90 f/s,RGB 相機最大分辨率為1 920×1 080,RGB幀率為30 f/s,RGB傳感器視場FOV(H×12 V×D)為69.4°×42.5°×77°(±3°),長寬高為90 mm×25 mm×25 mm,所用接口為USB 接口,采用Vision Processor Board 及Intel Real Sense Vision Processor D4。文中實驗示意圖如圖3 所示。

圖3 實驗示意圖
紅外光發射器將紅外結構光投射到場景中,紅外接收部分主要有左右兩個紅外相機,用于接收被物體反射的紅外光,并采集場景內物體的空間信息;RGB 相機用于獲取彩色圖像。
實驗中,在D435i 前方放置目標,獲取彩色圖像和深度圖像,并配準對齊,融合到一幅圖像中,利用MobileNet-SSD 模型定位場景中的目標,構建包圍盒,通過深度圖像計算機器人到目標之間的距離。實驗中測到的距離為105.1 cm,實驗結果如圖4 所示。
4 結束語

圖4 實驗結果圖
對于機器人移動過程中的障礙物檢測,為了判斷目標障礙物的類別與距離,研究融合深度學習和視覺感知的障礙物檢測技術,利用Intel RealSense D435i 深度相機獲取場景信息,基于深度學習MobileNet 和SSD 網絡提取場景中的目標并輸出目標類別和距離,為機器人障礙物檢測提供新的方法。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
