城市軌道交通全自動洗車方案研究
2021-05-13 07:57:58秦小虎孫曉光
鐵路通信信號工程技術 2021年4期
秦小虎,孫曉光
(1. 重慶市軌道交通(集團)有限公司,重慶 401120;2. 通號城市軌道交通技術有限公司,北京 100070)
1 概述
隨著城市快速發展,人們的出行需求急劇增加,為提高城市軌道交通系統的運行效率,全自動運行控制系統應運而生,且將被廣泛使用。全自動停車場作為全自動運行控制系統的重要組成部分之一,主要完成全自動洗車的功能。全自動洗車能夠大幅提高洗車效率,降低運營維護人員的工作強度,充分體現了全自動停車場的自動化程度。為實現全自動洗車的功能,信號系統需要增加與洗車機的接口功能和邏輯關系。本文主要對洗車過程中各個相關系統的信息交互、接口方式、通信流程及洗車機狀態等進行研究,給出城市軌道交通全自動洗車方案。
2 接口方案設計
全自動運行控制系統中,系統根據洗車作業計劃給出提示,在人工進行確認后自動觸發至洗車線的進路,列車在全自動駕駛模式(FAM)下,洗車作業由車載VOBC 控制完成,車載VOBC 通過聯鎖系統向洗車機發送洗車請求,收到洗車機的確認回復后,車載VOBC 向車輛發送洗車模式及牽引命令,待列車就位后開始洗車作業;在洗車作業的過程中,車載VOBC 控制列車定點停車及折返換端,完成列車的清洗;洗車完成后,車載VOBC 控制列車出清洗車庫停車點,列車停穩后退出洗車模式,系統再根據洗車作業計劃自動觸發回庫進路。
由此可見,全自動運行控制系統的全自動洗車功能,由信號系統與洗車機間的接口配合實現,因此,首先對信號系統與洗車機間的接口方案進行詳細分析與設計。
2.1 洗車機、聯鎖系統、車載VOBC間信息交互
全自動洗車過程由車載VOBC 控制。聯鎖系統負責傳送車載VOBC 與洗車機之間的交互信息,本身不直接參與洗車過程的相關邏輯。
聯鎖系統根據車載VOBC 發送的狀態及命令,向洗車機發送洗車請求、暫停、頭洗車停穩狀態、暫停、尾洗車停穩狀態、列車通過洗車區請求等信息;同時,采集來自洗車機的洗車機就緒、洗車請求確認、頭洗車允許移動命令、尾洗車允許移動命令、緊急停車命令、返回確認狀態信息以及洗車機故障信息等,轉發給車載VOBC。其具體交互過程如圖1 所示。
2.2 聯鎖系統與洗車機接口方式
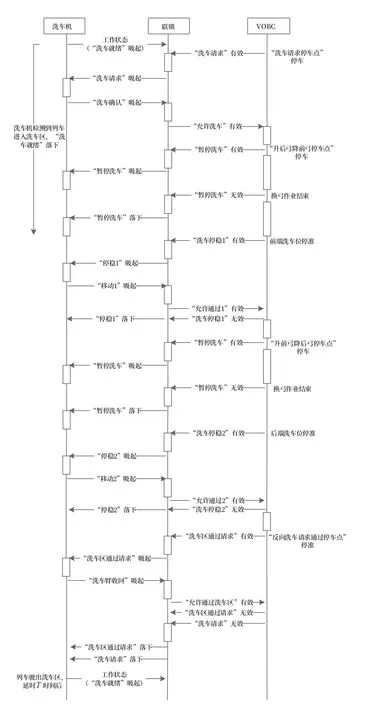
圖1 洗車機、聯鎖系統、車載VOBC間信息交互Fig.1 Information interaction among car washer, interlocking system and onboard VOBC
全自動洗車機位于洗車庫內,通過繼電接口與聯鎖系統連接,進行控制信息和狀態信息的交互。繼電電路為雙斷電路,通過安全型輸入/輸出板對安全繼電器進行狀態采集和命令驅動。聯鎖系統將洗車請求、暫停洗車、停穩、通過洗車機請求等信息發送給洗車機;洗車機將洗車機就緒、洗車請求確認、允許移動、洗車機故障、返回確認狀態信息發送給聯鎖系統。具體交互信息如表1 所示。

表1 聯鎖系統與洗車機接口Tab.1 Interface between interlocking system and car washer
3 洗車過程中VOBC-CI通信流程
在確定信號系統與洗車機的接口方案后,為實現全自動洗車功能,需根據正常洗車流程,設計在洗車過程中,VOBC 與CI 需遵循的相應通信流程,以此來控制列車狀態和洗車機以實現自動洗車功能。
洗車機處于自動模式是全自動洗車的前提,正常的洗車流程為:VOBC 發送“洗車請求”,洗車機收到后回復“請求確認”,之后啟動自動洗車功能。根據此流程,VOBC 與CI 的具體通信流程如下。
VOBC 按照CBTC 互聯互通原則,在具備“CI通信軌道區段”屬性的軌道區段前配置距離內,開始 與CI 建 立 通 信。VOBC 發 送VOBC-CI 心 跳幀、VOBC-CI 控制信息幀的條件均與CBTC 互聯互通系統相同。VOBC 發送VOBC-CI 控制信息幀時,應同時發送VOBC-CI 全自動運行交互信息幀。在列車停穩前,VOBC-CI 全自動運行交互信息幀中“自動洗車”部分的全部信息均為默認值(下稱“VOBC 全自動洗車默認幀”)。
CI 與VOBC 建立通信后,發送CI-VOBC 心跳幀、CI-VOBC 狀態信息幀的條件均與CBTC 互聯互通系統相同。CI 發送CI-VOBC 狀態信息幀時,應同時發送CI-VOBC 全自動運行交互信息幀。CI 收到VOBC 發送的VOBC 全自動洗車默認幀后,發送的CI-VOBC 全自動運行交互信息幀中的“自動洗車”部分的全部信息均為默認值(下稱“CI 全自動洗車默認幀”)。
VOBC 控車在“洗車請求停車點”停車,停穩后,VOBC 向CI 發送的VOBC-CI 全自動運行交互信息幀中的“洗車請求”字段取值應變為“請求有效”(下稱“洗車請求有效”),其他字段應均為默認值。
CI 收到VOBC 發送的“洗車請求”信息后,向洗車機轉發洗車請求。
CI 收到VOBC 發送的“洗車請求有效”信息時,應根據收到洗車機的“洗車請求確認”信息判斷向VOBC 發送的CI-VOBC 全自動運行交互信息幀中的“洗車請求確認”字段:若洗車機允許洗車,則該字段取值應為“允許洗車”(下稱“允許洗車”);若洗車機不允許洗車,則該字段取值應為“不允許洗車”(下稱“不允許洗車”)。
VOBC 發送“洗車請求有效”信息,且未處于洗車工況時,若收到CI 發送的“允許洗車”信息,應進入洗車工況并通知車輛TCMS,允許列車前行(洗車過程中由車輛控制列車前行,VOBC 控制列車停車)。
VOBC 處于洗車工況時,若收到CI 發送的“不允許洗車”信息,應實施緊急制動,退出洗車工況,并停止發送洗車請求。
VOBC 應控制列車在“升后弓降前弓停車點”/“升前弓降后弓停車點”停準,并禁止列車繼續前行。列車在“升后弓降前弓停車點”/“升前弓降后弓停車點”停穩時,VOBC 應通知TCMS 進行該停車點規定的換弓動作,換弓結束后,VOBC 應允許列車繼續前行。若該停車點同時具備“洗車暫停停車點”屬性,則列車停穩時,VOBC 向CI 發送的VOBC-CI 全自動運行交互信息幀中的“暫停洗車”字段取值應變為“請求有效”,換弓結束后,“暫停洗車”字段取值應變為“請求無效”。
CI 應將收到的VOBC-CI 全自動運行交互信息幀中的“暫停洗車”信息轉發給洗車機。
VOBC 應控制列車在“前端洗位停車點”/“后端洗位停車點”停準,并禁止列車繼續前行。列車在“前端洗位停車點”/“后端洗位停車點”停穩時,VOBC 向CI 發送的VOBC-CI 全自動運行交互信息幀中的“洗車停穩1”/“洗車停穩2”字段取值應變為“請求有效”。
CI 應將收到的VOBC-CI 全自動運行交互信息幀中的“洗車停穩1”/“洗車停穩2”信息轉發給洗車機。
CI 收到VOBC 發送的“洗車請求有效”信息時,應根據洗車機發送的前端洗車結束/后端洗車結束信息判斷向VOBC 發送的CI-VOBC 全自動運行交互幀中的“允許通過1”/“允許通過2”字段取值:若前端洗車/后端洗車結束,則“允許通過1”/“允許通過2”字段取值應為“允許通過”,若前端洗車/后端洗車未結束,則“允許通過1”/“允許通過2”字段取值應為“禁止通過”。
VOBC 判斷列車在“前端洗位停車點”/“后端洗位停車點”停準,且向CI 發送“洗車停穩1”/“洗車停穩2”字段取值為“請求有效”時,若收到CI 發送的“允許通過1”/“允許通過2” 字段取值為“允許通過”,則向CI 發送的 “洗車停穩1”/“洗車停穩2”字段取值應變為“請求無效”,并允許列車繼續前行。
VOBC 應根據ATS 發送的折返命令,控制列車在“折返停車點”停車,列車停穩后,退出洗車工況并通知TCMS,之后進行折返換端。換端后,新首端VOBC 應繼續向 CI 發送洗車請求有效信息。換端完成后,VOBC 控制列車前行。
VOBC 應控制列車在“洗車請求通過停車點”停準,并禁止列車繼續前行。列車在“洗車請求通過停車點”停穩后,VOBC 向CI 發送的VOBC-CI全自動運行交互信息幀中的“洗車區通過請求”字段取值應變為“請求有效”。CI 應將收到的VOBCCI 全自動運行交互信息幀中的“洗車區通過請求”信息轉發給洗車機。
CI 收到VOBC 發送的“洗車請求有效”信息時,應根據洗車機發送的允許通過信息判斷向VOBC 發送的CI-VOBC 全自動運行交互幀中的“允許通過洗車機”字段取值:若洗車機允許通過,則“允許通過洗車機”字段取值應為“洗車臂已收回”,若洗車機不允許通過,則“允許通過洗車機”字段取值應為“洗車臂未收回”。
VOBC 判斷列車在“洗車請求通過停車點”停準,且向CI 發送“洗車區通過請求”字段取值為“請求有效”時,若收到CI 發送的“允許通過洗車機” 字段取值為“洗車臂已收回”,則向CI 發送的“洗車區通過請求”字段取值應變為“請求無效”,“洗車請求”字段取值變為“請求無效”,并控制列車繼續前行。
VOBC 發送“洗車請求有效”信息時,若判斷列車安全包絡有重疊的軌道區段均無“洗車停車區域”屬性,則應退出洗車工況,向CI 發送的“洗車請求”字段取值變為“請求無效”。
CI 收到VOBC 發送的“洗車請求有效”信息時,應根據洗車機發送的故障狀態信息及急停按鈕狀態判斷向VOBC 發送的CI-VOBC 全自動運行交互幀中的“洗車機故障”字段取值:若洗車機無故障且急停按鈕未按下,則“洗車機故障”字段取值應為“洗車機無故障”,若洗車機故障或急停按鈕按下,則“洗車機故障”字段取值應為“洗車機故障”。
VOBC 收到CI 發送的“洗車機故障”字段取值為“洗車機故障”時,若處于洗車工況,則應退出洗車工況,輸出緊急制動停車,并通知ATS 報警。洗車工況下,若VOBC 判斷與CI 通信斷開,則應退出洗車工況,輸出緊急制動停車,并通知ATS 報警。
洗車工況下,若VOBC 輸出緊急制動,則應退出洗車工況,輸出緊急制動停車,并通知ATS 報警。
4 洗車機狀態跳轉
在洗車過程中,聯鎖系統對車載VOBC 與洗車機之間的交互信息進行傳送,控制洗車機動作完成自動洗車功能。根據通信流程中CI 傳送過來的通信指令,結合洗車機當前狀態,洗車機進行狀態跳轉。具體狀態跳轉如圖2 所示。
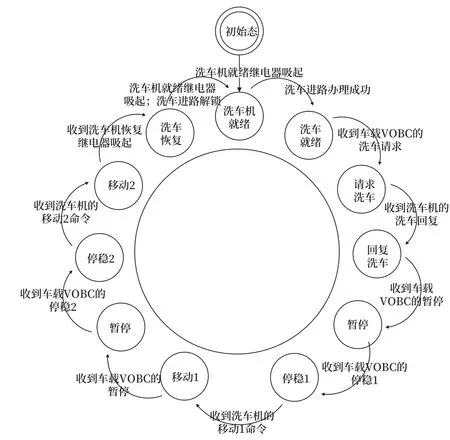
圖2 洗車機狀態跳轉圖Fig.2 Car washer state-jump diagram
洗車機處于圖中狀態情況時,執行的功能如下。
洗車機處于初始態,當洗車機就緒繼電器吸起時,轉為洗車機就緒狀態。
洗車機就緒狀態:向ATS 發送洗車機狀態;判斷是否滿足跳轉條件,若洗車進路辦理成功,則轉為洗車就緒狀態。
洗車就緒狀態:判斷是否滿足跳轉條件,若收到車載VOBC 的洗車請求,則轉為請求洗車狀態。
請求洗車狀態:向洗車機發送洗車請求(驅動對應繼電器吸起);判斷是否滿足跳轉條件,若收到洗車機的洗車回復,則轉為回復洗車狀態。
回復洗車狀態:向車載VOBC 發送洗車的請求回復信息;判斷是否滿足跳轉條件,若收到車載VOBC 的暫停信息,則轉為暫停狀態。
暫停狀態:向洗車機發送暫停命令信息;判斷是否滿足跳轉條件,若收到車載VOBC 的停穩1 信息,則轉為停穩1 狀態。
停穩1 狀態:向洗車機發送停穩1 列車狀態信息(驅動對應繼電器吸起);判斷是否滿足跳轉條件,若收到洗車機的移動1 命令,則轉為移動1 狀態。
移動1 狀態:向車載VOBC 發送移動1 的命令信息;判斷是否滿足跳轉條件,若收到車載VOBC 的暫停信息,則轉為暫停狀態。
暫停狀態:向洗車機發送暫停命令信息;判斷是否滿足跳轉條件,若收到車載VOBC 的停穩2 信息,則轉為停穩2 狀態。
停穩2 狀態:向洗車機發送停穩2 列車狀態信息(驅動對應繼電器吸起);判斷是否滿足跳轉條件,若收到洗車機的移動2 命令,則轉為移動2 狀態。
移動2 狀態:向車載VOBC發送移動2 的命令信息;判斷是否滿足跳轉條件,若收到洗車機恢復繼電器吸起信息,則轉為洗車恢復狀態。
洗車恢復狀態:判斷是否滿足跳轉條件,若洗車機就緒繼電器吸起、洗車進路解鎖,則轉入洗車機就緒狀態。
5 結束語
全自動洗車相比傳統洗車,具有高可靠性、高安全性、高自動化程度的特點,聯鎖系統與洗車機接口的交互信息也更加豐富。本文主要對洗車信息交互、接口方式、通信流程及洗車機狀態轉換等方面進行研究。在設計方案的過程中,需要綜合考慮各方面因素,以更好的實現全自動洗車功能。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
中外會展(2014年4期)2014-11-27 07:46:46
