基于HLA-DDS復合體系的拖拉機PST分布式虛擬試驗系統
2021-05-14 03:57:32閆祥海周志立
計算機應用與軟件 2021年5期
閆祥海 周志立
(河南科技大學車輛與交通工程學院 河南 洛陽 471003)
0 引 言
動力換擋變速器(PST)是拖拉機關鍵的動力傳動件,可實現負載條件下拖拉機動力不中斷自動換擋,使拖拉機的動力性、燃油經濟性、操縱舒適性、安全性及作業效率得到顯著提高。傳統物理試驗方法在PST性能測試中起到關鍵作用,但存在試驗周期長、費用高、污染重等問題,降低了PST產品開發效率[1-2]。隨著數字化設計在拖拉機PST創新產品開發中的應用及虛擬試驗技術的發展,PST虛擬試驗成為產品設計方案可行性分析、產品研發及產品試驗等多個環節評估和驗證的先進方法。目前,虛擬樣機技術、虛擬現實技術及虛擬儀器技術在PST虛擬試驗中均得到應用[3-4],但PST虛擬試驗以特定的試驗任務或明確的研究需求為引導,由于建模方法、數據格式及傳輸協議存在差異等原因,不同虛擬試驗系統之間相互孤立,無法實現系統聯通。因此,建立一套通用的PST虛擬試驗系統,集成PST現有模型及試驗設備,對提高PST虛擬試驗效率、縮短PST創新產品研發周期具有一定的作用。
根據PST試驗實際需求,一套通用的PST虛擬試驗系統必須具備標準的試驗運行支撐框架、分布式建模、虛擬作業環境模擬、試驗過程和數據管理、虛實融合驗證、試驗結果評價等功能,以及互操作性、可擴展性、可重用性及實時性等性能。高層體系結構(High Level Architecture,HLA)是對象管理組織(Object Management Group,OMG)和美國電氣和電子工程師協會(Institute of Electrical and Electronics Engineers,IEEE)認定的開放分布式仿真系統架構標準[5-6]。基于HLA體系建立PST虛擬試驗系統,規范了虛擬試驗的交互過程,使不同虛擬試驗參與對象之間的信息交互按照統一的標準執行,有效改善了系統的互操作性和重用性。但是,試驗數據均經過運行支撐環境(Run Time Infrastructure,RTI)交互,當數據傳輸量較大時,虛擬試驗系統實時性會下降,尤其在有硬件設備參與的虛實融合驗證試驗中,系統時延會影響虛擬試驗進程。數據分發服務(Data Distribution Service,DDS)是OMG制定的滿足實時性要求的分布式仿真系統架構規范,以數據為中心,提供實時高效的分布式數據傳遞服務和技術支撐[7],可有效補充HLA實時性不足的弱點。但是,HLA和DDS之間無法直接通信,HLA與DDS之間通信方式的選取及通信功能的技術實現是PST虛擬試驗系統的關鍵。
本文在分析拖拉機PST虛擬試驗系統構架的基礎上,重點研究HLA與DDS數據交互原理,解決HLA與DDS數據交互關鍵問題,建立基于HLA與DDS復合體系的拖拉機PST虛擬試驗系統。采用試驗的方式,測取系統數據傳輸時延和吞吐量參數,評價系統實時性和數據傳輸量性能指標。
1 PST虛擬試驗系統構架
1.1 邏輯結構
HLA、DDS規范了不同虛擬試驗仿真模型之間的信息交互標準與交互服務,根據虛擬試驗系統的需求及HLA、DDS體系特征,建立基于HLA-DDS復合體系的拖拉機PST虛擬試驗系統,其邏輯結構如圖1所示。
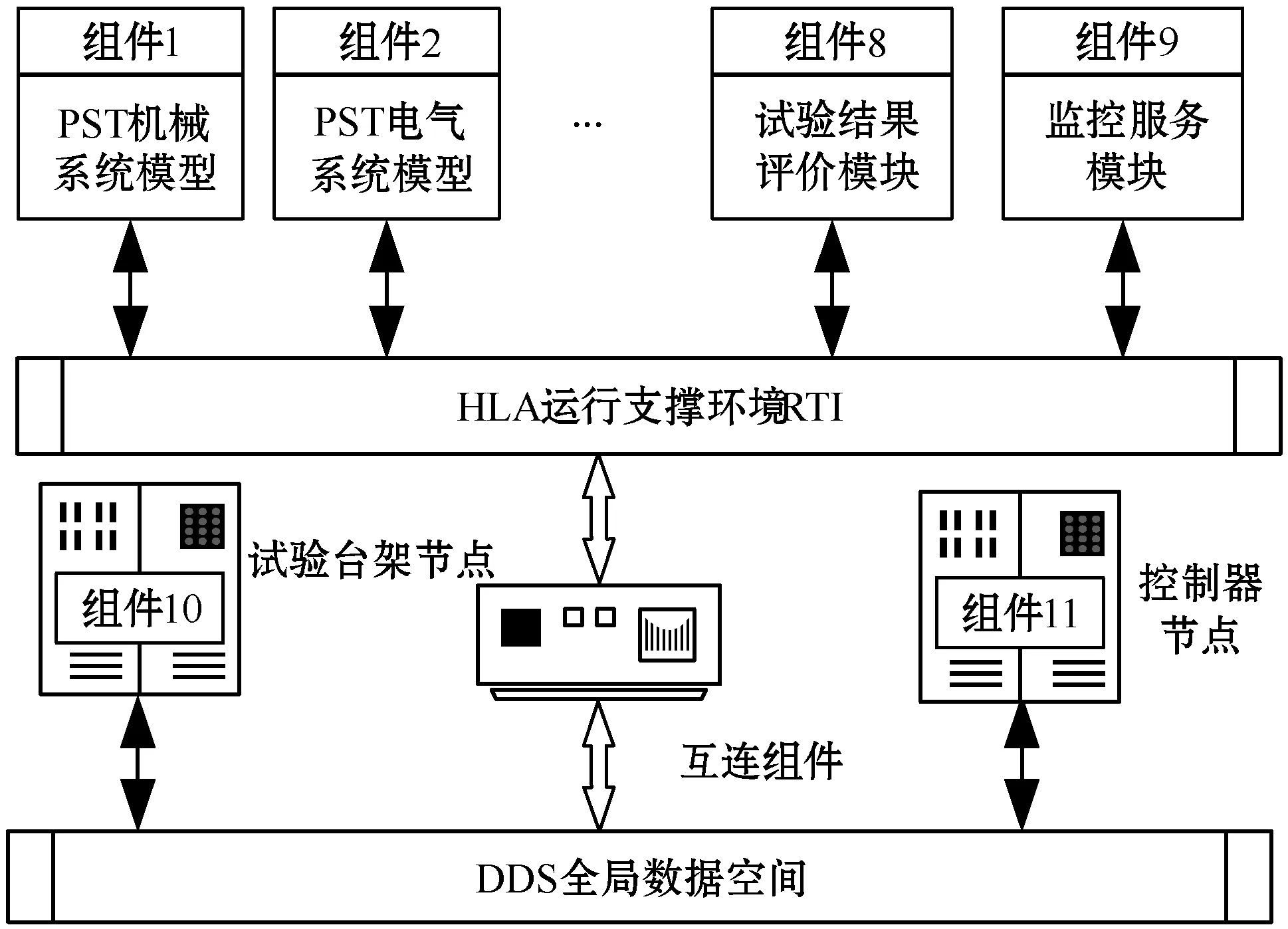
圖1 基于HLA-DDS虛擬試驗系統邏輯結構圖
圖1中:組件1-組件9分別為PST機械系統模型、電氣系統模型、液壓系統模型、控制系統模型、作業載荷模型、試驗流程管理模塊、試驗數據管理模塊、試驗結果評價模塊、監控服務模塊。9個組件分布于HLA體系,組件間數據交互均通過RTI進行。組件10為PST試驗臺架節點,組件11為控制器節點,以上2個硬件設備分布于DDS體系,通過全局數據空間交互數據。互連組件既是HLA組件又是DDS組件,實現二者之間的聯通。PST虛擬試驗系統邏輯結構既保留了HLA嚴格的時序控制和可擴展性,又增加了DDS優良的數據交互實時性。
1.2 硬件結構
根據虛擬試驗系統邏輯結構,建立PST虛擬試驗系統硬件平臺,如圖2所示。
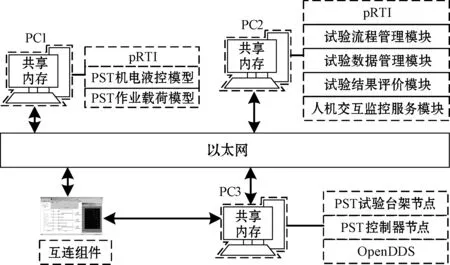
圖2 PST虛擬試驗系統硬件平臺
計算機性能參數為:64位Windows 7操作系統,CPU頻率3.2 GHz。3臺計算機以太網連接。
PC1計算機運行HLA運行支撐環境軟件pRTI、PST機械系統模型(Adams, Pro/E)、電氣系統模型(ModelSim)、液壓系統模型(AMESim)、控制系統模型(Simulink)和作業載荷模型等組件,組件之間采用共享內存的方式存儲數據。
PC2計算機運行HLA運行支撐環境軟件pRTI、試驗流程管理模塊、試驗數據管理模塊、試驗結果評價模塊、人機交互監控服務模塊等組件,組件之間采用共享內存的方式存儲數據。
PC3計算機運行DDS運行支撐軟件OpenDDS、互連組件、PST試驗臺架節點、PST控制器節點,組件之間采用共享內存的方式存儲數據。
2 HLA與DDS互連原理分析
HLA面向虛擬試驗過程,通過管理服務使得虛擬試驗系統按照試驗設計邏輯進行;DDS面向虛擬試驗中數據交換,通過QoS策略達到實時的數據傳輸[8-9]。二者均以發布/訂閱的形式完成體系內數據交互,但在對象粒度及數據類型方面存在差異[10-11]。HLA與DDS互連的關鍵是解決二者之間對象粒度和數據類型的轉換問題。本文在分析三種互連方案的基礎上,提出了橋接組件互連構想。
2.1 HLA與DDS互連方案
PST虛擬試驗系統中HLA體系部分包括組件(應用層)和RTI提供的運行支撐服務(支撐層),根據DDS體系在HLA體系中融入層次位置不同,形成三種虛擬試驗系統集成方案,如圖3所示。
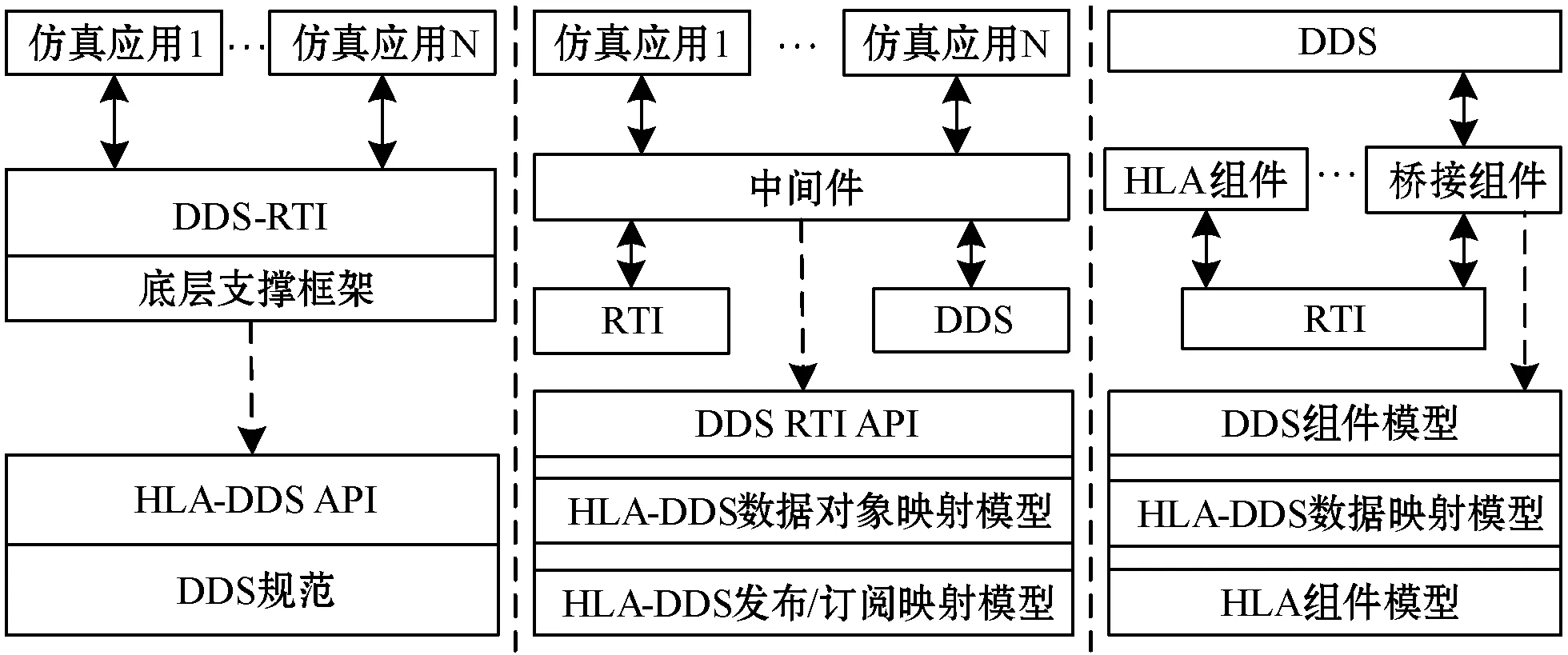
(a) HLA-DDS集成方案A (b) HLA-DDS集成方案B(c) HLA-DDS集成方案C圖3 三種HLA與DDS集成方案原理圖
圖3(a)所示的方案A中,在HLA支撐層融合DDS體系,形成基于DDS規范的底層支撐框架DDS-RTI,同時,DDS-RTI提供標準的HLA-DDS API。該方案從支撐層徹底解決了HLA與DDS的數據交互,但存在開發難度大、技術成本高、開發周期長等問題。
圖3(b)所示的方案B中,在HLA與DDS支撐層與應用層之間設計中間件,中間件映射HLA與DDS之間數據對象及發布/訂閱機制,提供標準的Middleware API。該方案利用中間件技術解決了HLA與DDS數據通信問題,但產生了全新的Middleware API,與現有的HLA體系及DDS體系API不同,對現有仿真應用的兼容存在問題。
圖3(c)所示的方案C中,在HLA和DDS的應用層設計橋接組件實現HLA與DDS的數據交換,橋接組件既是HLA體系組件,又是DDS體系組件。該方案最大限度地保留了HLA和DDS運行機制,可在成熟軟件平臺上開發PST虛擬試驗系統,開發難度小,與現有仿真應用兼容性好。雖然在每次系統初始化時均需對橋接組件進行軟件更新,但相對于航天、航空、武器等領域復雜機械產品,PST復雜程度低,數據類型、數據傳輸量少,能夠接受橋接組件的每次更新工作量和時間開銷。
2.2 橋接組件結構原理
橋接組件主要功能是完成HLA與DDS之間對象粒度統一及數據類型轉換,其結構由組件模型和映射插件組成,如圖4所示。
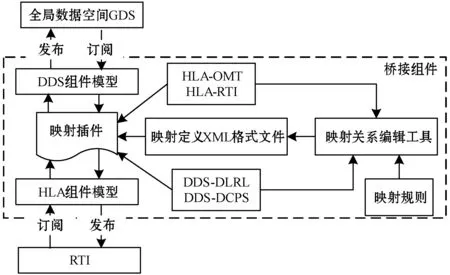
圖4 HLA-DDS橋接組件結構原理圖
HLA組件模型遵守HLA規范,負責發布/訂閱來自DDS體系的數據,與其他HLA組件進行數據交互。DDS組件模型遵守DDS規范,負責發布/訂閱來自HLA體系的數據,與其他DDS組件進行數據交互。
映射插件是橋接組件的核心,完成HLA組件模型與DDS組件模型之間的數據轉換。在初始化PST虛擬試驗系統時,映射關系編輯工具將HLA對象模型模板OMT(Object Model Template)與DDS以數據為中心的訂閱/發布層DCPS(Data Centric Publish Subscribe)、HLA-RTI與DDS數據本地重構層DCTS(Data Local Reconstuction Layer)分別進行解析映射,形成映射定義XML格式文件。在映射過程中,映射規則起約束作用。HLA-OMT對應的FED文件、DDS-DLRL對應的IDL文件、映射定義XML格式文件存儲路徑相同,形成映射插件。
3 基于元模型的橋接組件開發
根據橋接組件結構原理,利用元模型理論對橋接組件進行開發。元模型是模型更高層次的抽象,定義了模型的組成元素及元素之間的關系,能夠更高層次描述HLA與DDS象粒度及數據類型[12]。統一建模語言UML利用規范的圖形模型和模型間的聯系,抽象描述系統的子系統及子系統之間的關系,類圖是其中重要的一種圖形模型,應用于軟件需求分析、軟件代碼開發等場合[13]。采用UML類圖對橋接組件進行建模,利用Rational Rose開發平臺完成橋接組件代碼的開發。將橋接組件模型分為四部分,分別為橋接組件元模型(MetaModel)、HLA組件模型(HLA-UML)、DDS組件模型(DDS-UML)及映射規則(Rule),在Rational Rose開發平臺中分別對應四個封裝包。
3.1 橋接組件元模型
橋接組件元模型是組件模型更高層次的抽象,包含建立組件模型的元素,可消除HLA與DDS在數據交互規范層面的差異,如圖5所示。
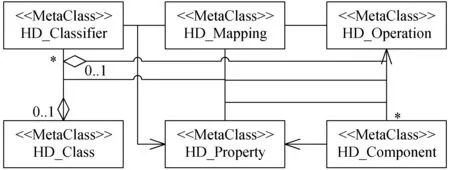
圖5 橋接組件元模型
圖5定義了6類橋接組件元模型構造型,構造型之間的關系包括聚合、單向關聯及雙向關聯。構造型與抽象對象之間的對應關系如表1所示。
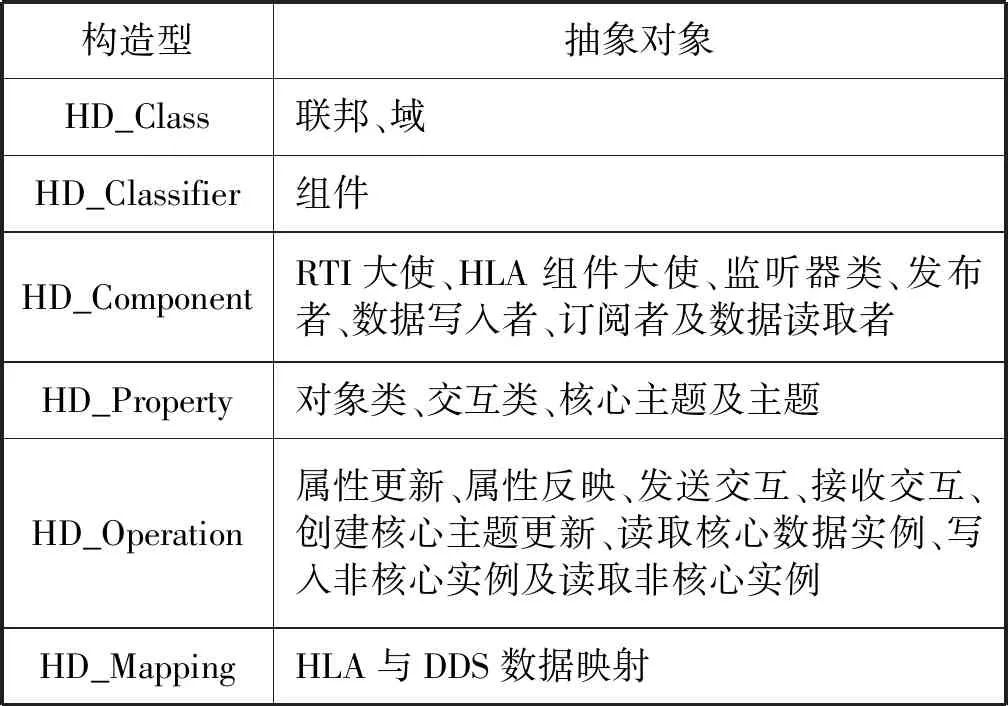
表1 構造型與抽象對象對應關系
3.2 橋接組件UML模型
橋接組件中的HLA組件模型滿足HLA規范,在pRTI軟件中按照RTI規范與其他聯邦成員交互數據,利用橋接組件元模型,建立HLA組件UML模型,如圖6所示。

圖6 HLA聯邦成員UML模型
圖6中,類<
橋接組件中的DDS組件模型滿足DDS規范,在Open DDS軟件中按照DCPS規范與其他組件交互數據,利用橋接組件元模型,建立DDS組件UML模型,如圖7所示。
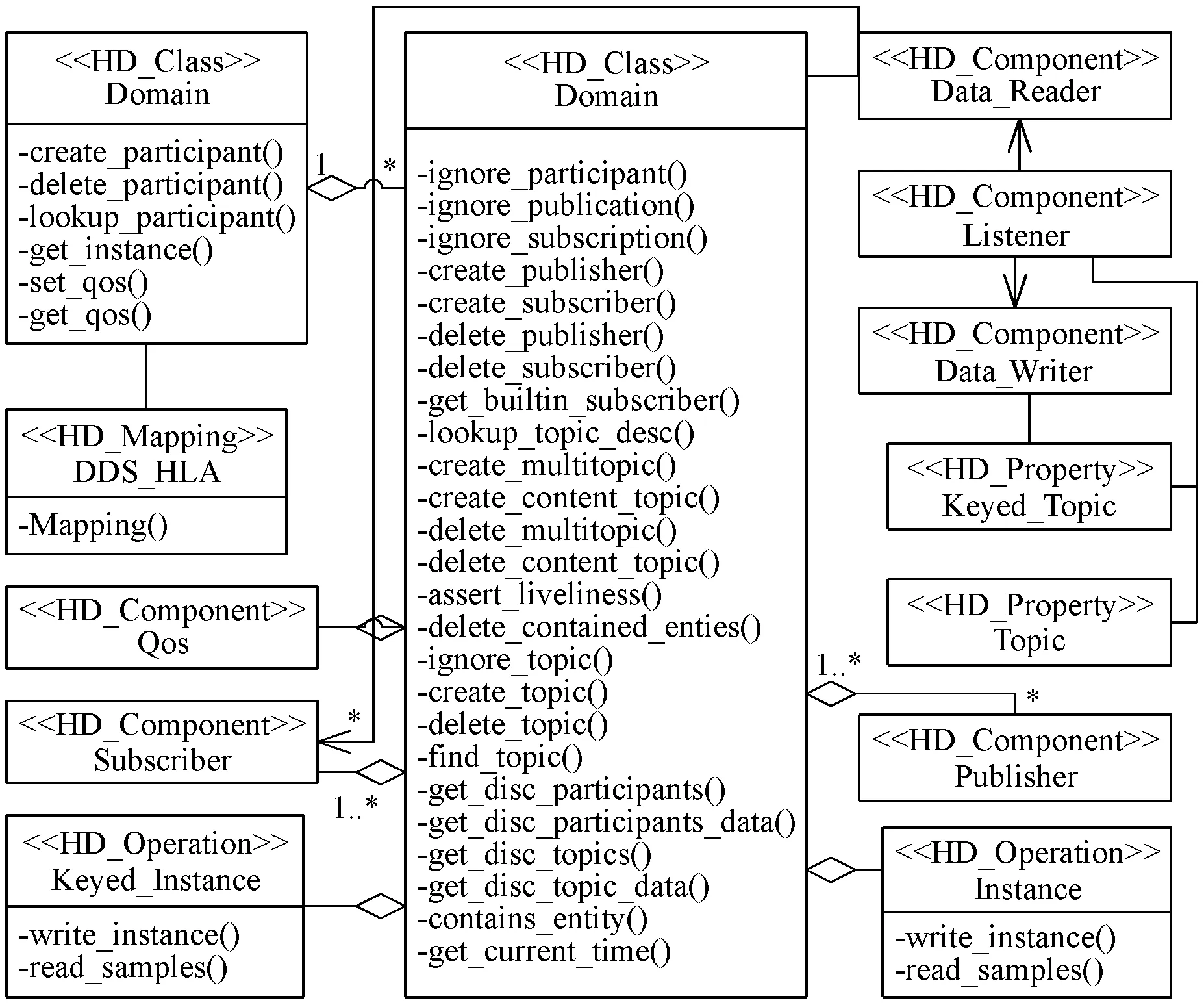
圖7 DDS域成員UML模型
圖7中,類<
3.3 橋接組件插件生成
映射類<
Mapping=
(1)
式中:ID為映射方向;ModelS為源模型;ModelT為目標模型;Rule為映射規則。
ID為00時,HLA組件UML模型為源模型;ID為01時,DDS組件UML模型為源模型,映射規則以表格的形式定義,見表2。
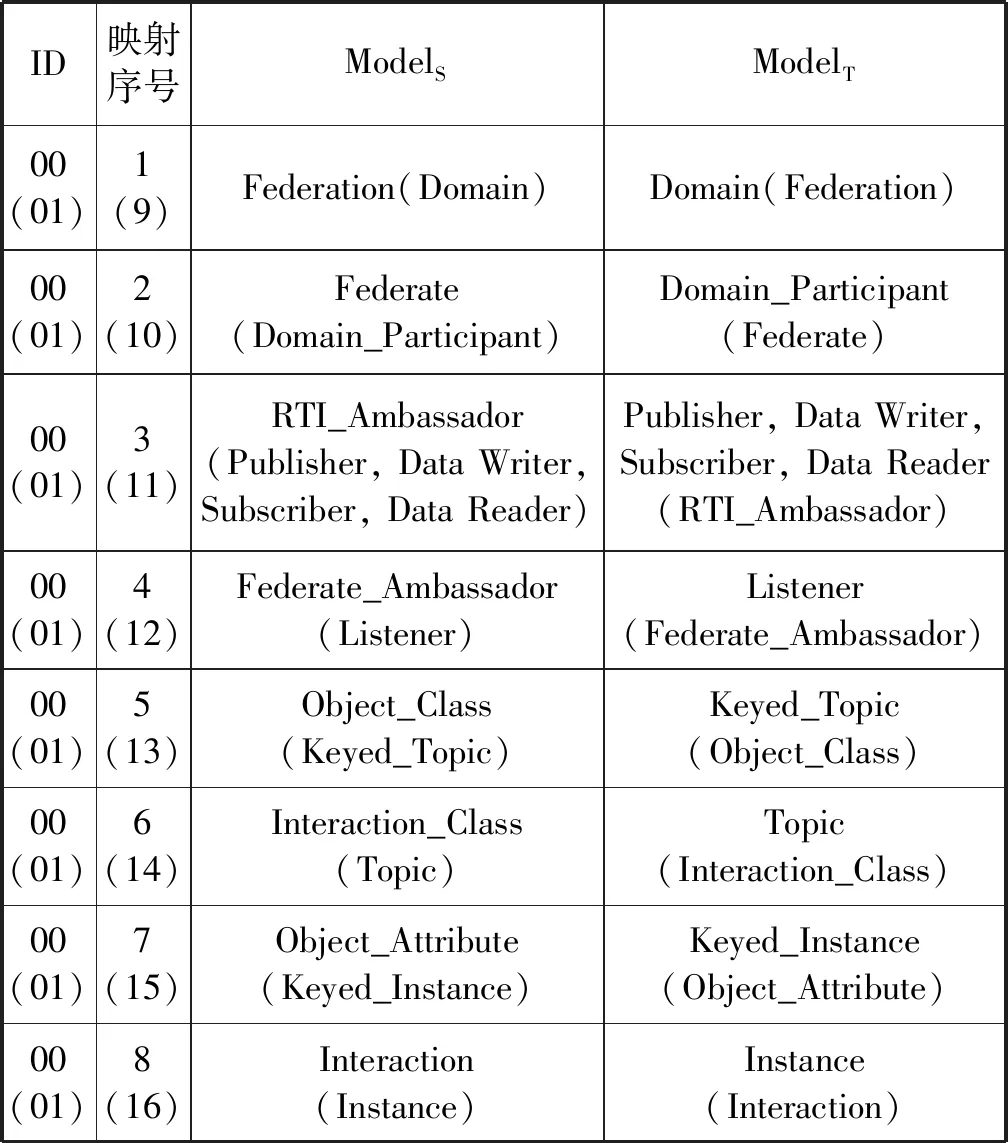
表2 橋接組件模型映射規則
表2中,HLA組件模型讀取ID為00的表中信息,將HLA數據轉換為DDS數據;DDS組件模型讀取ID為01的表中信息,將DDS數據轉換為HLA數據。利用Rational Rose開發平臺的雙向工程功能,對橋接組件UML模型進行代碼轉換,生成插件框架代碼。針對PST具體試驗工況,對橋接組件模型進行實例化,可得到最終橋接組件運行代碼。
4 虛擬試驗系統時延和吞吐量測試
數據傳輸時延和吞吐量參數體現了系統在實時性和數據傳輸量方面能力,是PST虛擬試驗系統重要的指標參數。根據虛擬試驗推進步長和硬件設備響應時間,系統時延應當不超過10 ms;根據系統組件數量及組件數據交互頻率,吞吐量應當不低于15 Mbit/s。基于PST加載試驗臺架,建立PST虛擬試驗系統測試平臺,如圖8所示,對PST分布式虛擬試驗系統數據傳輸時延和吞吐量進行測試。
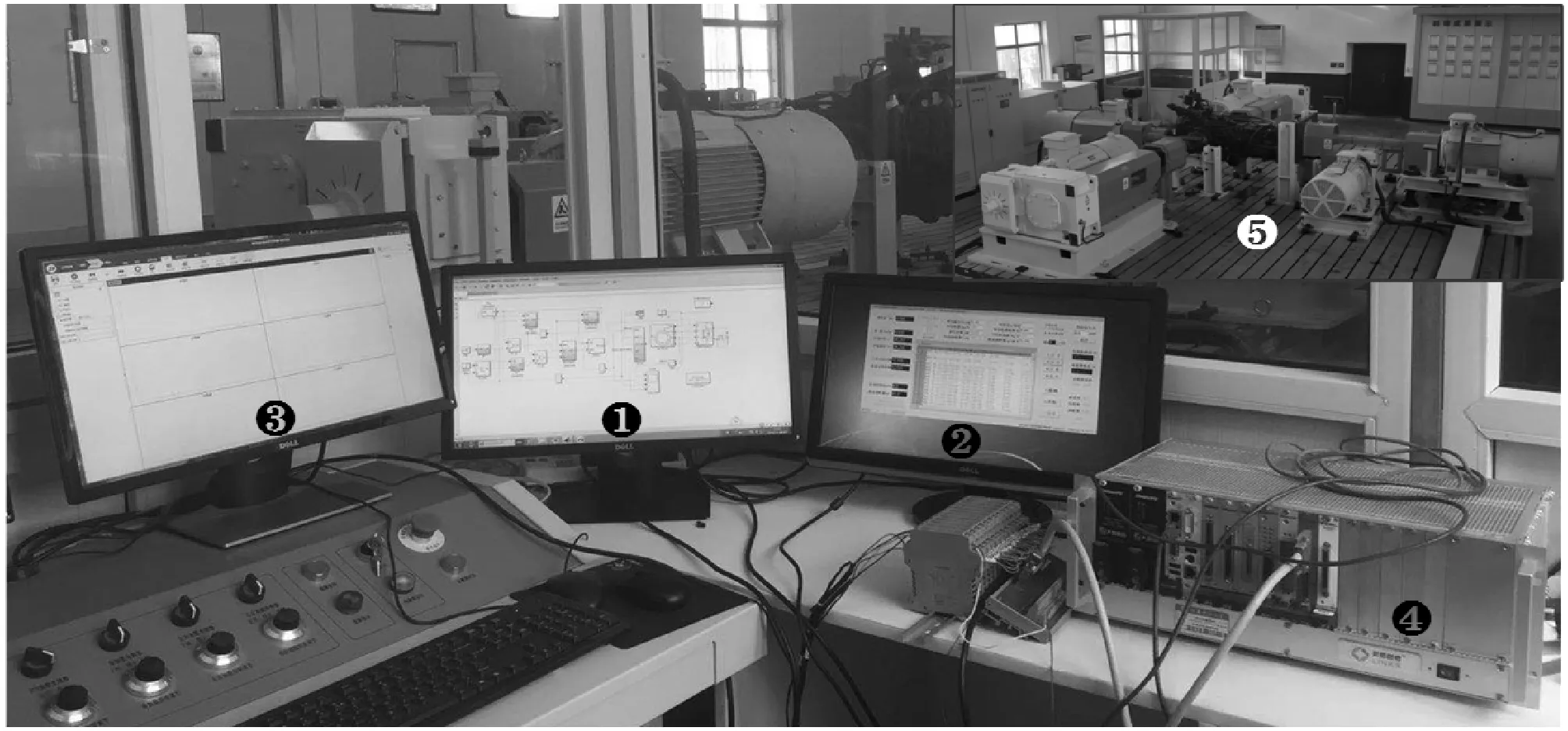
①:PC1;②:PC2;③:PC3;④:數據采集控制器;⑤:PST試驗臺架圖8 拖拉機PST虛擬試驗系統平臺
圖8中,PC1、PC2、PC3三臺分布式計算機的配置及運行程序與圖2保持一致。PC1運行pRTI軟件和控制系統模型(Simulink)組件,PC2運行pRTI軟件和人機交互監控服務模塊組件。PSTPST試驗臺架節點的數據采集控制器采集PST試驗臺傳感器信號和PST傳感器信號,同時可輸出PST試驗臺和PST執行機構控制信號。數據采集控制器上位機軟件Links-RT作為一個DDS組件與PC3中Open DDS軟件連接。橋接組件在PC3中運行,隨虛擬試驗系統完成初始化。
4.1 數據傳輸時延性能測試
為了對比不同對象屬性數量下的數據傳輸時延性能,Simulink組件建立了一個20路PWM控制模型(占空比相同),仿真20個對象屬性。具體測試方法如下:
(1) 啟動PST虛擬試驗系統,系統初始化完成;
(2) Simulink組件運行PWM控制模型,輸出1路PST換擋電磁閥電流控制信號,傳遞至Links-RT,同時啟動計時器,計為T1時刻;
(3) Links-RT接收到控制信號后,發送反饋信號至聯邦成員Simulink;
(4) 重復步驟(2)-步驟(3)50次,停止計時器,計為T2時刻;
(5) 得到1路電流控制信號對應數據大小下的時延為T2-T1;
(6) 重復步驟(2)-步驟(5),得到2-20路電流控制信號對應數據大小下的時延。
測得的數據傳輸時延結果如圖9所示。
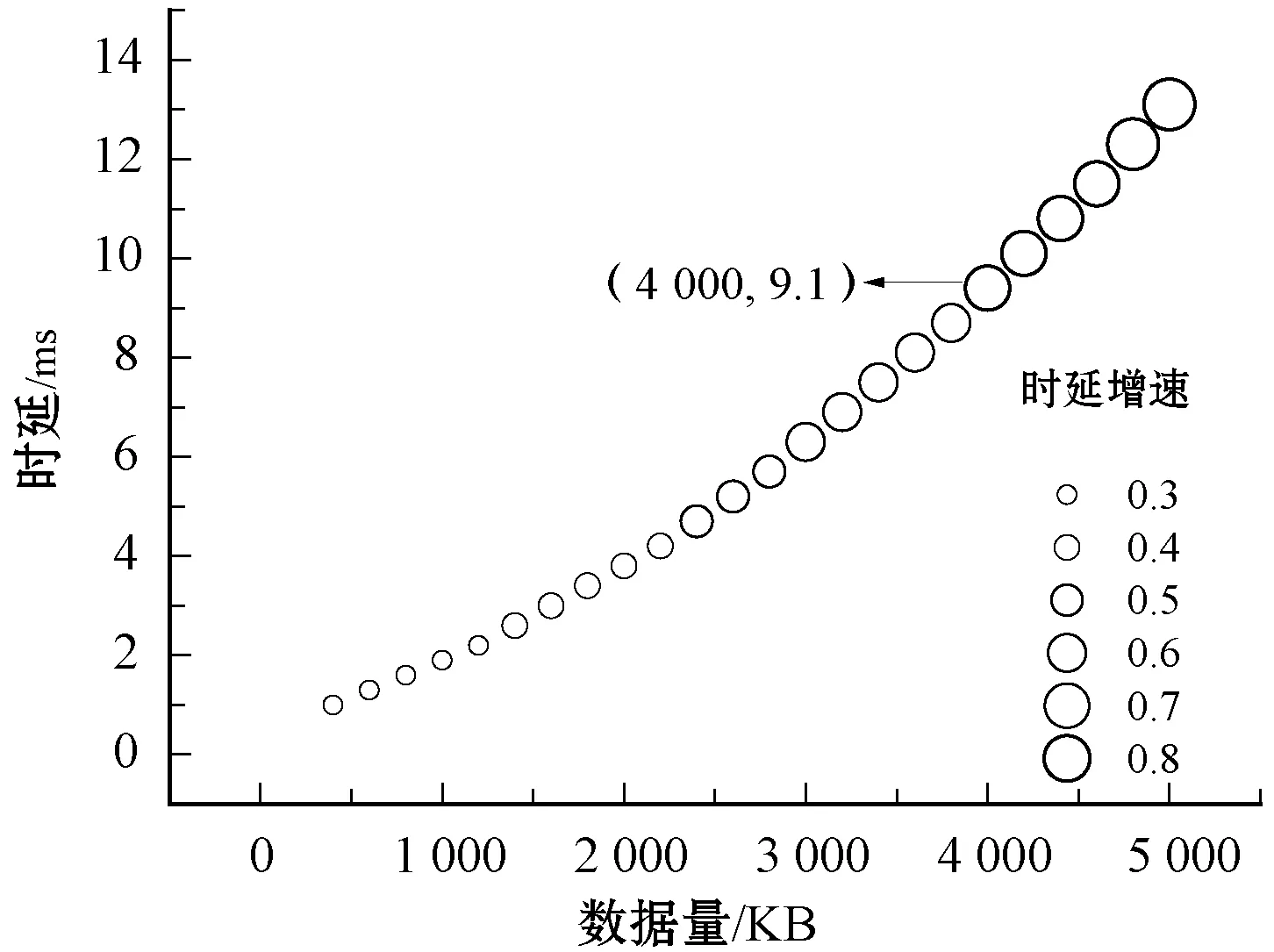
圖9 數據傳輸時延測試結果
圖9中,因為每次數據的傳輸都要經過橋接組件的映射轉換,隨著傳輸數據量增大,時延增長,且時延增速也增大。當數據量達到4 000 KB時,時延為9.1 ms,滿足系統最大時延不超過10 ms的實時性要求。在有硬件設備參與的PST虛擬試驗中,該數據傳輸時延性能是可以接受的。
4.2 數據傳輸吞吐量性能測試
為了測得橋接組件數據傳輸吞吐量最大值,利用數據傳輸時延性能測試場景對數據傳輸吞吐量性能進行測試。具體測試方法如下:
(1) 啟動PST虛擬試驗系統,系統初始化完成;
(2) Simulink組件運行PWM控制模型,輸出1路PST換擋電磁閥電流控制信號,傳遞至Links-RT,同時啟動計時器,計為T1時刻;
(3) Simulink組件以固定頻率連續發送控制信號數據,當Links-RT接收到的數據量達到1 MB時,Simulink組件停止發送控制信號數據,計時器計為T2;
(4) 得到數據傳輸吞吐量為1/(T2-T1);
(5) 重復步驟(2)-步驟(4),得到2-20路電流控制信號對應的數據傳輸吞吐量。如果數據傳輸吞吐量趨于平穩,可停止測試;如果數據傳輸吞吐量仍呈上升趨勢,可增加PWM控制模型,提高傳輸數據量,直至數據傳輸吞吐量趨于平穩。
測得的數據傳輸吞吐量結果如圖10所示。
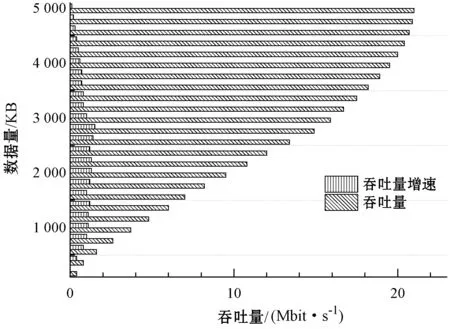
圖10 數據傳輸吞吐量測試結果
圖10中,隨著傳輸數據量增大、吞吐量增長,吞吐量增速減小,最后趨于平緩。因為傳輸數據量增大后,橋接組件數據映射轉換消耗時間增長,導致數據傳輸吞吐量在20 Mbit/s附近波動。當數據量達到4 000 KB時,數據傳輸吞吐量接近20 Mbit/s,滿足PST虛擬試驗系統數據傳輸量的要求。
5 結 語
本文對基于HLA與DDS復合體系建立的拖拉機PST分布式虛擬試驗系統進行了研究,解決了HLA與DDS之間數據交互問題。本文主要結果如下:
1) 虛擬試驗系統應用層采用橋接組件結構解決了HLA與DDS之間的數據交互。應用元模型理論和UML類圖建模方法開發了橋接組件軟件,實現了拖拉機PST分布式虛擬試驗系統數據交互和實時性的功能及性能要求。
2) 在有硬件設備參與虛擬試驗時,PST虛擬試驗系統性能穩定,數據量達到4 000 KB時,時延為9.1 ms,數據傳輸吞吐量接近20 Mbit/s,滿足虛擬試驗系統時延不超過10 ms,吞吐量不低于15 Mbit/s的要求。
3) 基于HLA與DDS開發的PST虛擬試驗系統高效利用現有PST模型和設備資源,在模型重用、互操作、虛實融合驗證及系統擴展方面具有一定優勢。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19