基于移動激光掃描三維點云的限界檢測技術研究
2021-05-17 09:16:56張亞勇
鐵道標準設計 2021年5期
張亞勇
(蘇州市軌道交通集團有限公司,江蘇蘇州 215004)
引言
隨著我國城市化進程的持續快速推進,大城市面臨著越來越重的公共交通壓力。由于城市軌道交通具有快捷、運力大、綠色環保、基本不占用地面空間等優點,對優化城市空間布局、提高交通運輸效率、帶動經濟發展具有重大促進作用,已經成為大城市公共交通體系的骨干網絡,其運營總里程及在建里程的規模日益龐大。
為保障城市軌道交通的安全平穩運行,線路運營維護檢測具有重要的作用,而限界檢測則是其中的重要一環。限界是指為保證運輸安全而規定的建筑物、設備與機車車輛相互間在線路上不能逾越的輪廓尺寸線。限界分為車輛限界、設備限界、建筑限界3種,是設備和管線安裝位置、工程建設等必須遵守的依據。
傳統上城市軌道交通限界檢測的常用方法是斷面檢測法,依據設備限界規定的輪廓線,制造一臺限界檢測車,通過在軌道上行駛來實現限界檢測。限界檢測車由固定支架、可變支架和觸板組成,在行駛過程中當觸板與侵限物體發生物理碰撞時,即確定該處存在侵限。該檢測方法原理簡單,但在實施過程中存在較多弊端:需要耗費較多人力物力制造檢測車,上線下線困難;在線路不同區段如緩和曲線、圓曲線、車站、區間等限界發生變化時,現場需人工對觸板大小進行調整,效率低下;當遇到超限情況時,需倒車使觸板與侵限物體再次碰撞,人工量測侵限量并做記號;不能有效記錄檢測數據等,已不能滿足現代工程的檢測需求。
為了克服上述傳統限界檢測方法的弊端,近年來機器視覺[1]、移動式三維激光掃描[2-9]等技術在限界檢測應用方面得到廣泛研究,移動式三維激光掃描技術更是顯示出巨大的應用潛力。該技術集成了三維激光掃描儀、慣性測量單元、里程計等多種傳感器,通過為多源傳感器建立高精度的統一時間基準,實現了移動狀態下的數據同步采集。移動式三維激光掃描系統搭載于軌道小車上并被推行前進,激光掃描點在前進方向形成密集的螺旋線,從而完成對城市軌道交通的全斷面掃描;將掃描數據與慣性測量單元、里程計的數據相融合,即可得到按里程展開的、能夠反映隧道與鋼軌相對位置關系的海量點云數據。數據處理方面,文獻[10]采用全站儀引入外部坐標基準生成三維點云,增加了外業工作量;文獻[11]將線路設計中線用于提取點云斷面,僅能用于帶絕對坐標的點云數據處理,且增加了數據處理的復雜性;點云與點云的精確配準采用ICP方法[12-18],對點云與標準幾何模型的配準較少涉及;限界侵限點分析則多采用射線法[19-20],模型較為復雜。
基于現有技術的不足,本文采用相對測量的方法,將原始點云數據按線路里程展開,通過鋼軌精確配準來獲取建筑限界與點云疊加的位置基準,并提出一種新的侵限點分析方法,使內外業流程均得到極大簡化。
1 點云按線路里程展開
三維激光掃描儀架設在軌道小車上,其掃描方向與軌道垂直,則當軌道小車被推行前進時,掃描中心沿線路方向移動,因此與設備固連的掃描坐標系也處于不斷的運動當中。在每一個瞬間,掃描點的三維直角坐標均被定義在當前的掃描坐標系下,也即沿線路方向的坐標值為零,線路垂向及橫向的坐標值不為零。為了將掃描數據按線路里程展開,還需要將原始點云數據與里程計及慣性測量單元的數據進行融合處理。
由于為多源傳感器建立了高精度的時間基準,因此可以用時間來進行多傳感器數據的配準。為此首先建立線路空間直角坐標系:以前進方向為Y軸;線路橫向為X軸,面向大里程左負右正;線路垂向為Z軸。采用里程計數據,根據每個掃描點時間內插出當前掃描中心的里程,并將該里程作為掃描點的Y坐標;采用慣性測量單元的數據,根據每個掃描點時間內插出掃描中心在線路橫向的傾角,并采用該傾角對掃描點的X、Z坐標進行變換,坐標變換模型見式(1)。
(1)
式中,ε為掃描中心在線路橫向的傾角;(x1、z1)為變換后的掃描點坐標;(x2、z2)為變換前的掃描點坐標。由于以掃描中心為原點進行剛性變換,故沒有平移參數及尺度縮放參數。經上述多源數據融合處理后,即得到按線路里程展開的三維激光點云。圖1為隧道掃描數據經展開后的三維點云模型,該模型能夠反映隧道輪廓及各種建(構)筑物與鋼軌的相對位置關系,也反映了隧道在線路橫向與水平面的傾斜關系,為后續的鋼軌提取及限界分析奠定了數據基礎。
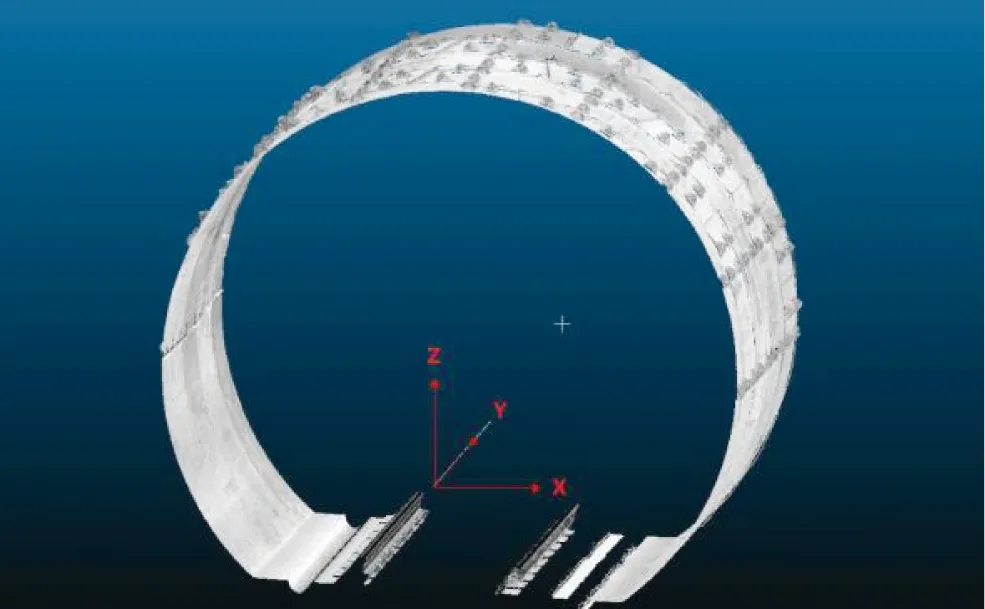
圖1 按線路里程展開的三維點云模型
2 鋼軌提取
2.1 鋼軌點云粗提取
限界以鋼軌為分析基準,在獲得按里程展開的三維點云模型后,應首先進行鋼軌提取。激光點云中的每個點僅包含空間直角坐標、反射強度、測量時間等信息,沒有被測物體的屬性信息,因此在沒有先驗信息的情況下,單純根據點云的幾何位置關系分析并提取鋼軌較為困難,且面對海量點云數據時計算效率極低。另一方面,按里程展開的三維點云模型在每個斷面上均以掃描儀的掃描中心為原點,而掃描儀安裝在軌道小車上,其掃描中心與鋼軌的相對位置保持固定,因此可以利用這種固定的位置關系進行鋼軌點云的粗提取,從而極大地提高效率。掃描中心與鋼軌相對位置關系見圖2。
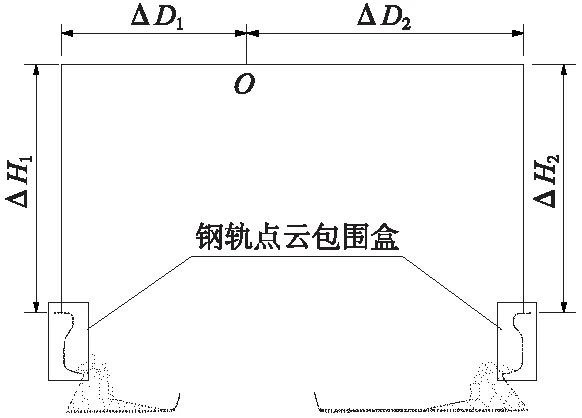
圖2 掃描中心與鋼軌相對位置關系示意
左右軌頂面中心與掃描中心O的水平距離分別為ΔD1及ΔD2,高差分別為ΔH1及ΔH2且兩者相等。以掃描中心為原點,根據上述參數能夠極為方便地獲取左右鋼軌頂面中心的坐標,再結合標準鋼軌斷面及20%的放大系數,即可得到矩形包圍盒的四個角點坐標,處于包圍盒內的點均為鋼軌掃描點。在斷面內左側鋼軌包圍盒四個角點坐標計算方法見式(2)。
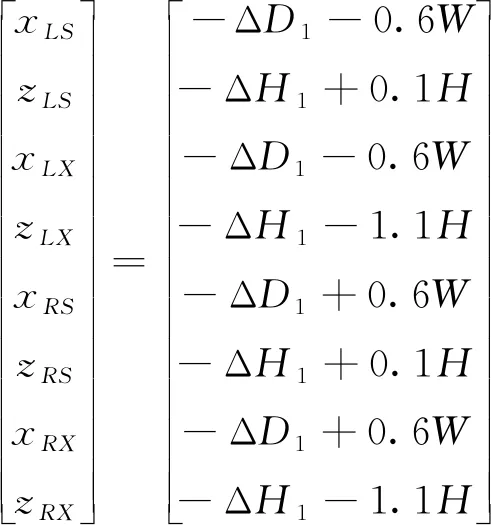
(2)
式中,W及H分別為標準鋼軌斷面的寬度及高度;(xLS、zLS、xLX、zLX、xRS、zRS、xRX、zRX)分別為左側鋼軌矩形包圍盒左上、左下、右上、右下四個角點的坐標。右側鋼軌的矩形包圍盒可類似處理。
2.2 鋼軌點云精確配準
鋼軌點云精確配準采用迭代最近點算法(ICP, Iterated Closest Points Algorithm)進行,其原理是通過迭代計算配準點集與待配準點集之間的最優變換矩陣,從而實現點云配準。ICP算法具有原理簡單、匹配精度高的優點,但對待配準點集的初始位置較為敏感。該算法每次迭代均需對待配準點集的全部點進行運算,當待配準點集中數據量過大時將導致配準效率顯著下降或迭代計算不收斂的情況。
為避免出現配準效率低下及迭代不收斂的情況,同時基于標準鋼軌斷面模型生成配準點集,對ICP算法流程進行改進。將鋼軌點云粗提取所獲得的左右軌點云矩形包圍盒坐標作為初始值,僅對該包圍盒內的點進行配準處理,從而可極大提高配準效率,算法流程如下。
(1)取固定步長ΔY,對按線路里程展開的三維點云進行劃分,則根據式(3)提取第i段pi的點云數據。
y∈[iΔY,(i+1)ΔY]
(3)

(3)建立標準鋼軌斷面,以軌頂中心為坐標原點,坐標軸系與點云模型相同。則可根據ΔD1、ΔH1及iΔY建立初始變換矩陣R0及t0。

(4)
(5)構建目標函數式(5),采用奇異值分解方法在E(R,t)=min的約束條件下,求解變換矩陣R及t。
(5)
(6)采用式(5)計算E(R,t),當其值小于給定的閾值或迭代次數大于給定閾值時,停止迭代計算;否則采用R及t從第4步開始再次執行,直至運算過程結束。
按照上述流程再對右軌進行點云提取并精確配準,同時進行配準誤差分析。點云與標準鋼軌斷面模型配準后效果見圖3,基于精確配準后的鋼軌點云,可以提取鋼軌頂面中心點,并作為設計建筑限界定位的基準。
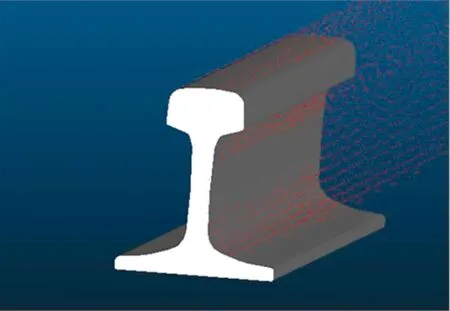
圖3 鋼軌點云配準效果圖
3 限界分析
3.1 建筑限界
城市軌道交通建筑限界是一組首尾相連的線段所形成的封閉空間,為確保行車安全,除受流裝置等特殊裝備外,其他建(構)筑物及設備等不得侵入。建筑限界不是一成不變的,在不同區段或站臺,其建筑限界也會不同,因此需要根據實際情況建立不同的建筑限界圖,每個建筑限界跟里程相關,以便侵限分析時不至于采用了錯誤的限界數據。
3.2 建筑限界與點云疊加
建筑限界以線路中心為基準且高于軌面一定數值進行定位,為此需要基于三維點云數據提取線路中線及軌面高程,以便將建筑限界與點云數據進行疊加。為此首先以ΔY為步長提取點云斷面,在精確配準鋼軌點云的前提下,獲取左右軌的軌頂面中心點坐標,然后根據兩個軌頂面中心點坐標計算線路中心及軌頂高程,進而確定建筑限界與點云疊加的位置基準。
圖4所示為建筑限界與點云疊加后的示意,同時以掃描中心為坐標原點建立直角坐標系,計算建筑限界的線段端點在該坐標系下的坐標。
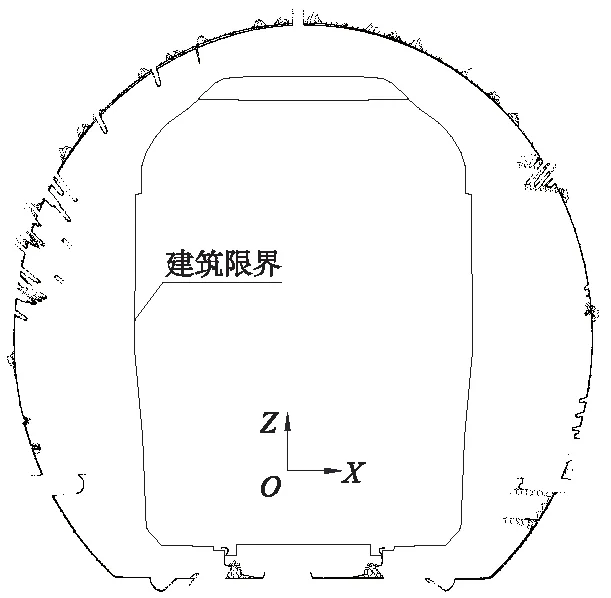
圖4 建筑限界與點云疊加
3.3 侵限點分析
限界分析的目的是發現是否存在已經侵限及即將侵限的情況,為此需要進行侵限點分析。在圖4所示的斷面坐標系內,當掃描點與坐標原點的連線與所有限界線段均不相交,則該掃描點侵限;當掃描點與坐標原點的連線與任一限界線段相交,則該掃描點不侵限。
設某段建筑限界線段的兩個端點坐標分別為(x1,z1)及(x2,z2),掃描點坐標為(xS,zS),坐標原點和掃描點的連線與該段限界的交點為(x,z),開列直線參數方程如下
(6)
式中,r為比例系數,經改化得x及z的表達式為
(7)
由于交點同時還處于限界線段上,因此基于式(7)及限界線段的端點坐標開列式(8)
(8)
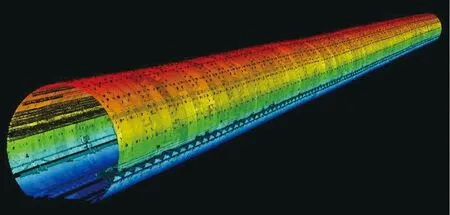
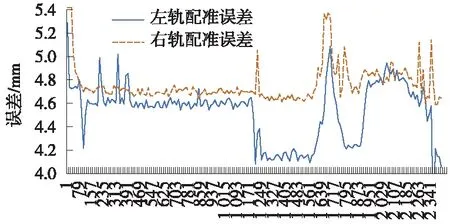
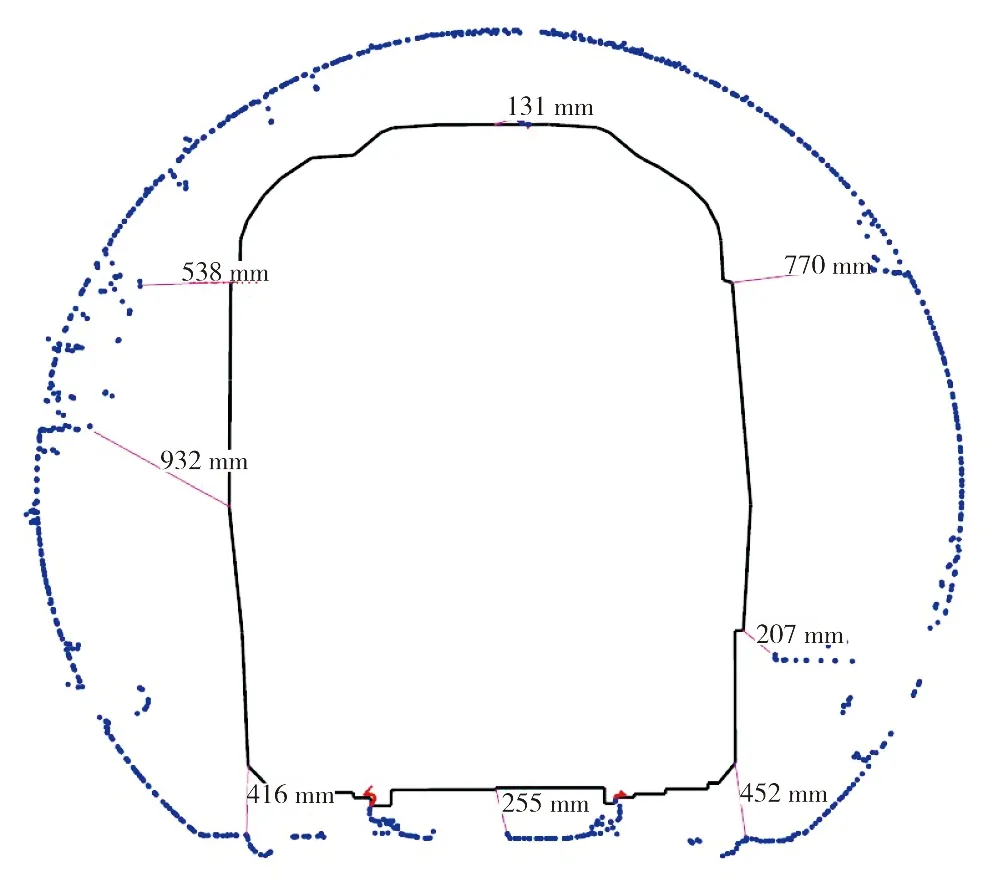
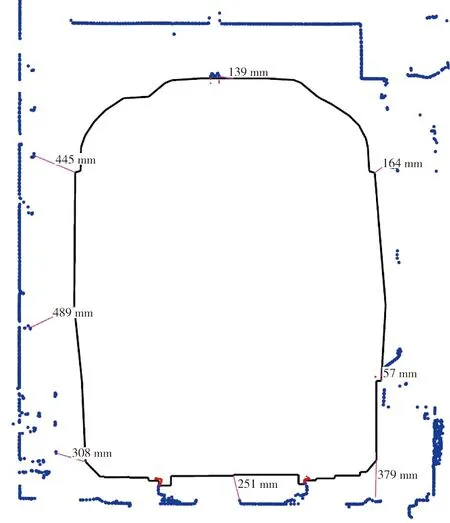
解式(8)所表示的一元一次方程并得到參數r值。重復上述過程,在掃描點保持不變情況下,針對每一段建筑限界線段均可計算出一個r值,則當所有的r值均>1時,該掃描點處于建筑限界內,表示侵限;當存在0 對處于設備限界之外的掃描點,計算每個點與設備限界線段端點的距離,并取極小值,則該值可用于評估設備限界之外的物體即將侵限的程度,值越小,表明即將侵限的程度越嚴重,應引起運營單位的重視。 在某城市新建軌道交通線路上開展三維激光掃描作業。測試段落均為隧道,線路全長2 400 m,包含三站兩區間;測試區段內,平曲線及豎曲線各有6條,其中平曲線最大半徑為1 200 m,最大超高值120 mm,最大豎曲線半徑5 000 m。作業采用的軌道小車集成有三維激光掃描儀、慣導系統及里程系統,當推行前進時多傳感器進行數據同步采集,三維激光掃描儀沿垂直線路方向作螺旋線式掃描。點云最大獲取速率為100萬點/s,掃描精度為1 mm,垂直視野范圍320°,在掃描儀正下方存在40°的盲區。線路掃描完成后,共獲取數據約40 GB。 按照前文所述數據處理流程對采集數據進行處理,首先對多源數據進行融合處理,將原始掃描數據按照里程展開,得到三維激光點云。對展開后的數據進行檢查,三維激光點云很好地反映隧道各類構(建)筑物的相對位置關系,其中一段區間段落的三維點云數據如圖5所示。 圖5 區間段落三維激光點云 采用經改進的ICP算法進行鋼軌點云提取并精確配準,左右軌配準誤差分布見圖6。左右軌配準誤差分布較為接近,其中左軌配準誤差均值為4.53 mm,中誤差0.25 mm;右軌配準誤差均值為4.76 mm,中誤差0.15 mm;這表明應用本文算法進行的鋼軌配準達到了較高的精度,為準確地提取軌頂面中心坐標奠定了基礎。 圖6 左右軌配準誤差統計 基于精確配準后的鋼軌點云開展區間及車站的建筑限界分析。根據設計文件建立本試驗段落的區間及車站標準建筑限界模型,然后按照一定間距及固定厚度提取點云斷面數據,并跟標準建筑限界模型進行疊加,最后進行侵限點分析。為了使限界分析完整準確,初次分析時點云斷面提取的間距與厚度應相同,且不宜大于5 cm,以確保所有掃描點均參與了限界分析計算,從而發現侵限點。區間限界分析及車站限界分析分別見圖7及圖8。 圖7 區間建筑限界分析 圖8 車站建筑限界分析 圖7、圖8中,用紅色線段標示出離建筑限界線段端點最近的掃描點,并給出距離值;當掃描點處于限界內時,則將點標示為紅色。 為了驗證基于三維點云進行限界分析的準確性及可靠性,不發生漏檢、誤檢等情況,對本試驗段檢測出的3處侵限斷面進行了現場復核,并與限界車檢測結果進行了對比。限界車也檢出了3處侵限斷面,侵限里程及斷面上侵限位置均與基于三維點云的檢測結果吻合良好。 本文針對當前移動式三維激光掃描技術在限界檢測應用方面存在的不足,提出按里程展開原始點云數據,顯著簡化外業操作流程;采用改進的迭代最近點算法進行鋼軌點云與標準鋼軌斷面的精確配準,解決了點云與幾何圖形的配準問題;提出基于兩條直線的交點位置來判斷點云是否侵限的分析方法,計算模型比傳統射線法侵限分析模型更加簡單。采用2.4 km隧道掃描實測數據對本文方法進行驗證,鋼軌提取并精確配準精度小于5 mm,能夠通過限界分析發現侵限物體,且侵限物體的里程及具體位置與限界檢測車的檢測結果一致,表明應用本文方法基于移動式三維激光掃描數據進行城市軌道交通限界檢測,分析結果準確可靠,滿足限界檢測應用的相關需求。隨著城市軌道交通的大規模建設以及對限界檢測要求的提高,移動式三維激光掃描技術已得到越來越廣泛的應用,因此本文方法可為相應工程項目所借鑒,具有較高的應用價值。4 應用實例
5 結語
猜你喜歡
北方建筑(2021年6期)2021-12-31 03:03:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
文苑(2020年10期)2020-11-07 03:15:36
現代裝飾(2020年6期)2020-06-22 08:43:12
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
海峽科技與產業(2016年3期)2016-05-17 04:32:12
