永磁同步電機(jī)磁鏈修正無位置傳感器控制
2021-05-20 08:07:08吳建華吳航
電機(jī)與控制學(xué)報(bào) 2021年4期
吳建華, 吳航
(浙江大學(xué) 電氣工程學(xué)院,杭州 310000)
0 引 言
隨著《中國制造2025》規(guī)劃的出臺,國家和政府明確強(qiáng)調(diào)要推動(dòng)機(jī)器人和數(shù)控裝備等創(chuàng)新產(chǎn)業(yè)的發(fā)展,其中,永磁同步電機(jī)因具有轉(zhuǎn)矩大、精度高、效率高等優(yōu)點(diǎn)而廣泛應(yīng)用于伺服設(shè)備,并且采取矢量控制策略可以使其具有類似直流電機(jī)磁鏈和轉(zhuǎn)矩相互解耦的特性,可以單獨(dú)對轉(zhuǎn)矩或磁鏈進(jìn)行控制,并且由于永磁體的存在,在電壓允許的條件下,可以有效提高電機(jī)的輸出轉(zhuǎn)矩,因此永磁同步電機(jī)在工控設(shè)備領(lǐng)域得到了越來越多的應(yīng)用和發(fā)展,是當(dāng)前的研究熱點(diǎn)之一。矢量控制方法對電機(jī)的位置精度提出了較高的要求,傳統(tǒng)的永磁同步電機(jī)常采用有位置編碼器獲得位置信息,這不但提高了系統(tǒng)的成本,還增加了電機(jī)的體積,并對使用環(huán)境提出了較高的要求,而使用無位置傳感器控制方法可以省去位置傳感器,并針對電機(jī)特定的工作環(huán)境選擇對應(yīng)的無位置傳感器控制策略。因此,無位置傳感器控制策略的研究具有廣闊的前景[1-4]。
內(nèi)置式永磁同步電機(jī)無位置傳感器控制策略在低速和中高速運(yùn)行時(shí)常用的方法分別是高頻注入法和反電勢法,而表貼式電機(jī)在低速運(yùn)行時(shí)由于凸極效應(yīng)不明顯往往采用IF控制方法。其中高頻注入法主要包括脈振高頻信號注入法、旋轉(zhuǎn)高頻信號注入法等[5-7],該方法需要利用內(nèi)置式電機(jī)的凸極特性,因此不適用于表貼式永磁同步電機(jī),而IF控制屬于轉(zhuǎn)速開環(huán)電流閉環(huán)的無位置控制方法,該方法可以有效解決表貼式電機(jī)的起動(dòng)問題。反電勢法主要包括滑模觀測器算法、模型參考自適應(yīng)算法等,該方法則利用電機(jī)的電壓方程估算電機(jī)反電勢,進(jìn)而估算電機(jī)位置信息[8-15],其中,由于表貼式永磁同步電機(jī)電壓方程的特殊性,電機(jī)轉(zhuǎn)速可以直接由估算的反電勢和電機(jī)磁鏈的比值獲得,而實(shí)際的運(yùn)行工況下,電機(jī)磁鏈?zhǔn)且粋€(gè)隨工況變化的測量量,往往無法直接由固定的磁鏈幅值估算電機(jī)位置信息。
永磁同步電機(jī)在不同的運(yùn)行工況下,溫度、電流等參數(shù)的變化不僅會(huì)影響定子電感、電阻的大小,還會(huì)影響磁鏈幅值,因此電機(jī)在運(yùn)行過程中磁鏈的變化不僅會(huì)嚴(yán)重影響對位置信息的估算,還會(huì)降低系統(tǒng)的穩(wěn)定性甚至失控。此外,由于電機(jī)磁鏈本身就是一個(gè)測量量,當(dāng)測量初值存在誤差時(shí),利用磁鏈觀測電機(jī)轉(zhuǎn)速時(shí)則會(huì)將誤差直接引入到估算的轉(zhuǎn)速和位置信息。磁鏈誤差觀測器根據(jù)電機(jī)的磁鏈方程,可以觀測得到磁鏈的誤差,通過磁鏈誤差對磁鏈幅值進(jìn)行在線修正,可以有效提高磁鏈幅值的準(zhǔn)確性[16-19]。本文提出了一種帶有磁鏈修正的滑模觀測器(FC-SMO),通過重寫磁鏈方程構(gòu)建磁鏈誤差觀測器以獲得磁鏈誤差,并對永磁體磁鏈進(jìn)行在線修正,進(jìn)而根據(jù)滑模觀測器估算的反電勢和磁鏈修正值估算轉(zhuǎn)速和位置信息。仿真與實(shí)驗(yàn)表明,本文所提出的方法能夠有效估算電機(jī)磁鏈誤差,在對磁鏈進(jìn)行在線修正后可以準(zhǔn)確估算出電機(jī)轉(zhuǎn)速和位置,實(shí)現(xiàn)永磁同步電機(jī)的無位置傳感器控制。
1 數(shù)學(xué)模型
表貼式永磁同步電機(jī)在靜止兩相坐標(biāo)系α、β下的電壓方程為
(1)
(2)
式中:ω為轉(zhuǎn)子電角速度;ψf為永磁體磁鏈;θ為轉(zhuǎn)子位置。
將式(1)改寫為電流的狀態(tài)方程,即
(3)
2 帶磁鏈修正的滑模觀測器
2.1 傳統(tǒng)滑模觀測器算法
基于式(3)所示的永磁同步電機(jī)電流狀態(tài)方程,為了獲得反電動(dòng)勢的估算值,傳統(tǒng)滑模觀測器的設(shè)計(jì)通常為
(4)

將式(3)和式(4)作差,可得定子電流的誤差方程為
(5)

滑模面函數(shù)為
(6)
滑模控制律設(shè)計(jì)為
(7)
式中m為滑模控制律增益系數(shù)。
當(dāng)觀測器的狀態(tài)變量到達(dá)滑模面后,根據(jù)等效控制原理,可得反電勢估算值為
(8)
根據(jù)式(2),可得電機(jī)轉(zhuǎn)速和位置估算值為
(9)
(10)
2.2 磁鏈誤差觀測器
電機(jī)磁鏈初值一般由測量獲得,測量的精度會(huì)直接影響轉(zhuǎn)速和位置的估算精度,此外,由于電機(jī)運(yùn)行在不同工況下會(huì)存在一些擾動(dòng)信號,使得定子電感、電阻以及永磁體磁鏈的幅值和角度發(fā)生偏移,此時(shí),如果將磁鏈幅值看作常量,并利用式(9)和式(10)計(jì)算得到轉(zhuǎn)子轉(zhuǎn)速和位置,勢必會(huì)出現(xiàn)偏差,嚴(yán)重時(shí)將會(huì)直接影響系統(tǒng)的穩(wěn)定性,造成系統(tǒng)失衡。利用磁鏈誤差觀測器獲得磁鏈誤差并進(jìn)行在線修正,將會(huì)提高電機(jī)轉(zhuǎn)速和位置的估算精度。
根據(jù)圖1可得定子磁鏈在兩項(xiàng)靜止坐標(biāo)系下的表達(dá)式為
(11)

同理可得,實(shí)際定子磁鏈在兩項(xiàng)靜止坐標(biāo)系下的表達(dá)式為
(12)
式中Δψα和Δψβ分別為兩相靜止坐標(biāo)系下的磁鏈誤差,其表達(dá)式為
(13)
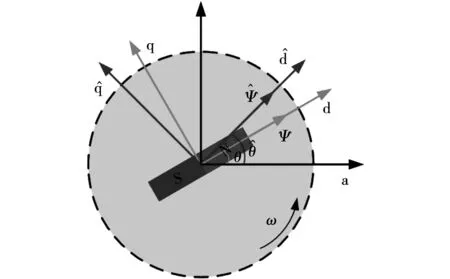
圖1 定子磁鏈模型Fig.1 Stator flux linkage model
根據(jù)式(12)和電機(jī)定子磁鏈方程可得
(14)
根據(jù)上式,當(dāng)定子磁鏈出現(xiàn)誤差時(shí),定子磁鏈微分方程可以表示為
px=Ax+Bu+Cd-Bff。
(15)

系數(shù)矩陣表達(dá)式為
(16)
當(dāng)忽略電機(jī)定子電感磁鏈時(shí),由式(11)可得
(17)
設(shè)計(jì)磁鏈誤差滑模觀測器如下,其結(jié)構(gòu)框圖如圖2所示。
(18)
式中kψ為常系數(shù)。

圖2 FC-SMO觀測器結(jié)構(gòu)框圖Fig.2 Diagram of FC-SMO
當(dāng)磁鏈誤差觀測器的狀態(tài)變量在滑模面附近切換時(shí),由式(13),定子磁鏈誤差即為永磁體磁鏈誤差,可以表示為
Δψ=msgn(z)+nz。
(19)
則實(shí)際磁鏈幅值和角度可由永磁體磁鏈經(jīng)過式(19)和式(20)修正后得到,整個(gè)磁鏈修正無位置傳感器控制框圖如圖3所示,即
(20)
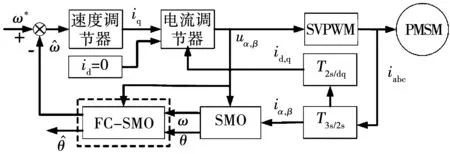
圖3 FC-SMO無位置傳感器控制框圖Fig.3 Diagram of FC-SMO position sensorless control
轉(zhuǎn)子位置可通過式(10)或下式獲得:
(21)
2.3 穩(wěn)定性分析
利用李雅普諾夫函數(shù)證明磁鏈誤差觀測器的穩(wěn)定性,其表達(dá)式為
(22)
對上式的α分量求導(dǎo)可得
(23)
則存在m>0,使得
(24)
3 仿真分析
3.1 永磁同步電機(jī)無位置傳感器控制系統(tǒng)
FC-SMO無位置傳感器控制框圖如圖3所示,表1為永磁同步電機(jī)模型參數(shù),搭建基于MATLAB/Simulink仿真以驗(yàn)證本文所提磁鏈修正方法的有效性,并對磁鏈存在誤差下的修正過程進(jìn)行了仿真分析。
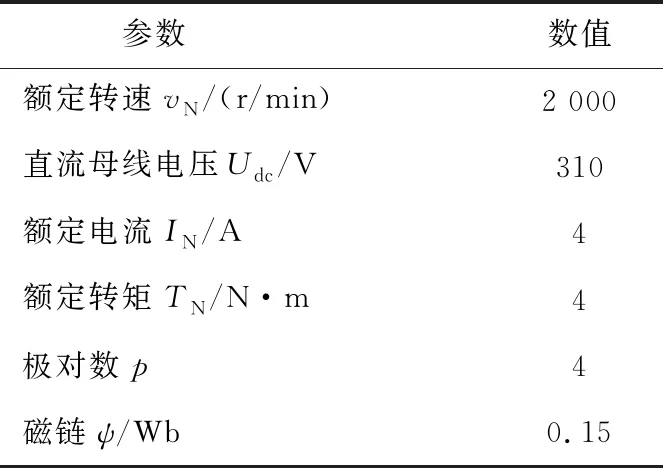
表1 永磁同步電機(jī)樣機(jī)參數(shù)
3.2 磁鏈擾動(dòng)下轉(zhuǎn)速和位置的跟蹤性
為驗(yàn)證FC-SMO對磁鏈誤差的修正能力,仿真設(shè)定電機(jī)轉(zhuǎn)速為1 500 r/min空載運(yùn)行,人為設(shè)定電機(jī)磁鏈為0.1 Wb作為磁鏈初值以驗(yàn)證本文所提磁鏈修正方法的有效性,如圖4所示。圖中:v和θ為電機(jī)實(shí)際轉(zhuǎn)速和位置;vSMO和θSMO為未經(jīng)修正的電機(jī)轉(zhuǎn)速和位置;vFC-SMO和θFC-SMO為經(jīng)過磁鏈誤差觀測器修正后的電機(jī)轉(zhuǎn)速和位置;Δψα和Δψβ為αβ坐標(biāo)系下的磁鏈誤差;ψ為永磁體磁鏈幅值。由圖4(a)可見,在電機(jī)磁鏈初值存在誤差或擾動(dòng)時(shí),傳統(tǒng)的滑模觀測器轉(zhuǎn)速和位置估算方法已無法跟蹤實(shí)際轉(zhuǎn)速和位置,電機(jī)估算轉(zhuǎn)速和位置均存在較大誤差,而經(jīng)過磁鏈誤差觀測器修正的電機(jī)轉(zhuǎn)速可以跟蹤實(shí)際轉(zhuǎn)速,具有較強(qiáng)的跟蹤能力。經(jīng)過磁鏈誤差觀測器修正后的永磁體磁鏈如圖4(b)所示,在對磁鏈進(jìn)行誤差修正后,永磁體磁鏈由初始的0.1 Wb跟蹤到實(shí)際的0.15 Wb。
為了進(jìn)一步驗(yàn)證所提磁鏈誤差觀測器的有效性,設(shè)置初始磁鏈為0.2 Wb,由圖4(c)和4(d),磁鏈誤差觀測器可以達(dá)到同樣的效果。通過仿真研究,磁鏈初值誤差在約±40%以內(nèi)時(shí)利用本文所提方法可以收斂至實(shí)際磁鏈,由此可見,當(dāng)電機(jī)磁鏈存在一定的擾動(dòng)及誤差時(shí),本文所提磁鏈誤差觀測器可以對電機(jī)磁鏈進(jìn)行修正,使其跟蹤電機(jī)實(shí)際磁鏈,并使電機(jī)估算轉(zhuǎn)速和位置跟蹤電機(jī)實(shí)際轉(zhuǎn)速和位置信息。
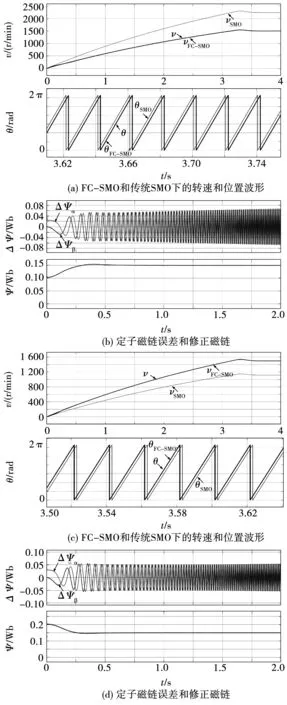
圖4 轉(zhuǎn)速、位置和磁鏈的跟蹤性Fig.4 Tracking performance of speed position and flux linkage
3.3 反電勢
增加磁鏈誤差及擾動(dòng)后無位置傳感器控制反電勢波形如圖5所示,反電勢波形仍具有較好的正弦性和穩(wěn)定性。

圖5 反電勢Fig.5 Back-EMF
4 實(shí)驗(yàn)驗(yàn)證
搭建dSPACE實(shí)驗(yàn)平臺驗(yàn)證本文所提磁鏈修正方法的正確性,對表1的表貼式永磁同步電機(jī)進(jìn)行實(shí)驗(yàn)研究,如圖6所示。
圖6 實(shí)驗(yàn)平臺Fig.6 Experiment platform
永磁同步電機(jī)首先由IF控制方式起動(dòng),當(dāng)電機(jī)轉(zhuǎn)速升到200 r/min時(shí),切換到FC-SMO控制方式運(yùn)行。利用未經(jīng)修正的磁鏈估算的電機(jī)轉(zhuǎn)速和位置與實(shí)際值誤差較大,系統(tǒng)無法在不同工況下穩(wěn)定運(yùn)行,在經(jīng)過磁鏈修正后,系統(tǒng)穩(wěn)定性顯著改善。
永磁同步電機(jī)首先在500 r/min空載和負(fù)載運(yùn)行測試,磁鏈初始值由反拖電機(jī)并根據(jù)式(9)計(jì)算獲得,反拖轉(zhuǎn)速為100 r/min,磁鏈計(jì)算結(jié)果約為0.153 Wb。由圖7(a)可見,電機(jī)在空載穩(wěn)態(tài)運(yùn)行時(shí),經(jīng)FC-SMO對磁鏈修正后可以準(zhǔn)確估算電機(jī)轉(zhuǎn)速,估算位置略滯后于實(shí)際位置。反電勢及估算磁鏈波形如圖7(b)所示,圖中Iabc為定子三相電流,E為反電勢波形,磁鏈在dSPACE上位機(jī)界面讀取數(shù)值為0.146 Wb。

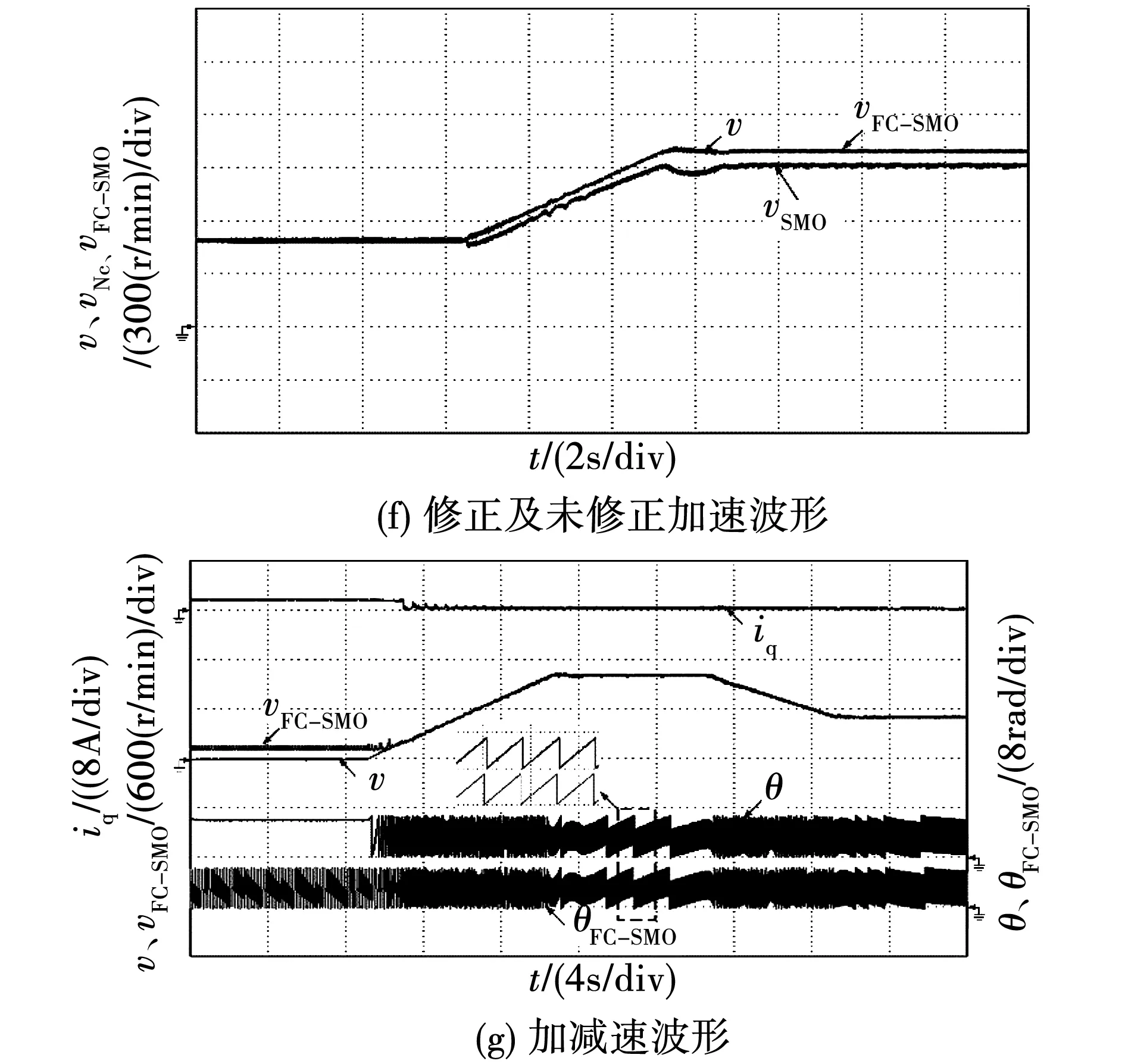
圖7 實(shí)驗(yàn)波形Fig.7 Experiment waveforms
圖7(c)為電機(jī)負(fù)載2 N·m運(yùn)行時(shí)定子電流、反電勢及磁鏈波形,負(fù)載運(yùn)行時(shí),定子電流約為2.2 A,反電勢基本保持不變,此時(shí)磁鏈讀數(shù)為0.141 Wb,由于電機(jī)負(fù)載運(yùn)行,定子電流產(chǎn)生的磁場對電機(jī)磁鏈造成了干擾,而磁鏈誤差觀測器對磁鏈加以修正,使電機(jī)轉(zhuǎn)速維持穩(wěn)定。由實(shí)驗(yàn)可以看到,不同工況下電機(jī)磁鏈?zhǔn)遣煌模柙诰€修正才能保證轉(zhuǎn)速和位置的估算精度。
圖7(d)為電機(jī)1 500 r/min負(fù)載3 N·m運(yùn)行時(shí)轉(zhuǎn)速和位置波形,轉(zhuǎn)速提高后,轉(zhuǎn)速誤差略有增加,但仍能準(zhǔn)確跟蹤實(shí)際轉(zhuǎn)速,圖7(e)為該工況下反電勢及估算磁鏈波形,磁鏈讀數(shù)為0.137 Wb,轉(zhuǎn)速提高時(shí),電機(jī)鐵耗增加,對磁鏈造成干擾,磁鏈在觀測器的修正后仍能保持轉(zhuǎn)速的準(zhǔn)確跟蹤。經(jīng)實(shí)驗(yàn)驗(yàn)證,磁鏈初值與終值在約±30%誤差范圍內(nèi)都能準(zhǔn)確觀測和修正。
圖7(f)中為磁鏈固定為0.15 Wb時(shí)電機(jī)由300 r/min加速至1 000 r/min的轉(zhuǎn)速波形,可見在電機(jī)轉(zhuǎn)速為300 r/min時(shí),磁鏈設(shè)置為0.15 Wb可以準(zhǔn)確估算出實(shí)際轉(zhuǎn)速,但是當(dāng)電機(jī)加速至1 000 r/min后估算轉(zhuǎn)速出現(xiàn)較大偏差,利用該轉(zhuǎn)速和位置信息已無法控制電機(jī)正常運(yùn)行,而經(jīng)過修正的電機(jī)轉(zhuǎn)速可以準(zhǔn)確跟隨實(shí)際轉(zhuǎn)速,可見利用數(shù)學(xué)公式估算電機(jī)轉(zhuǎn)速時(shí)進(jìn)行磁鏈修正是非常必要的。
圖7(g)為磁鏈初始值設(shè)置為0.19 Wb時(shí)電機(jī)由靜止起動(dòng)加速至1 000 r/min并加速回500 r/min的轉(zhuǎn)速波形,由于磁鏈初值存在誤差以及反電勢估算不明顯,電機(jī)在零速時(shí)估算出的電機(jī)轉(zhuǎn)速存在約80 r/min的誤差,在電機(jī)以IF控制起動(dòng)后,轉(zhuǎn)速達(dá)到100 r/min后,利用公式估算的電機(jī)轉(zhuǎn)速和鎖相環(huán)法估算的電機(jī)轉(zhuǎn)速基本一致,IF控制和滑模觀測器法的切換轉(zhuǎn)速設(shè)置為250 r/min,轉(zhuǎn)速切換成功后利用公式法估算的電機(jī)轉(zhuǎn)速和位置控制電機(jī)時(shí),加減轉(zhuǎn)速可滿足控制要求。實(shí)驗(yàn)中位置波形異常的原因是橫坐標(biāo)時(shí)間軸每格表示時(shí)間過大,采樣數(shù)據(jù)點(diǎn)不足所致,當(dāng)減小時(shí)間軸每格表示時(shí)間,位置信息即可恢復(fù)正常。
5 結(jié) 論
本文提出了一種帶有磁鏈擾動(dòng)修正的滑模觀測器FC-SMO,通過重寫定子磁鏈方程構(gòu)建磁鏈誤差觀測器以獲得磁鏈誤差,并對永磁體磁鏈進(jìn)行在線修正,進(jìn)而根據(jù)滑模觀測器獲得的反電勢和修正后的磁鏈值估算轉(zhuǎn)速和位置,仿真和實(shí)驗(yàn)驗(yàn)證了方法的有效性,F(xiàn)C-SMO具有以下優(yōu)點(diǎn):
1)構(gòu)建了磁鏈誤差方程,通過磁鏈誤差觀測器獲得磁鏈誤差并對永磁體磁鏈進(jìn)行在線修正,提高了轉(zhuǎn)速和位置的估算精度。
2)通過磁鏈誤差觀測器構(gòu)建磁鏈閉環(huán)控制,使傳統(tǒng)的表貼式永磁同步電機(jī)轉(zhuǎn)速估算方法適用于實(shí)際的無位置傳感器控制。
3)由于磁鏈誤差修正器的存在,拓寬了磁鏈初值的給定范圍,使得磁鏈初值約在±30%的誤差內(nèi)即可準(zhǔn)確估算電機(jī)位置信息,達(dá)到控制要求。