高速動車組牽引傳動系統拍頻抑制及其半實物仿真研究*
2021-05-21 01:53:54宋文勝趙雷廷周義杰
鐵道機車車輛 2021年2期
蔣 威,楊 寧,宋文勝,趙雷廷,周義杰
(1 中國鐵道科學研究院集團有限公司 機車車輛研究所,北京100081;2 北京縱橫機電科技有限公司,北京100094;3 西南交通大學,成都610031)
牽引傳動控制是高速動車組的關鍵技術之一,也是我國高速動車組自主化研制過程中所必須掌握的核心技術[1-3]。我國高速動車組牽引傳動系統普遍采用交-直-交主電路拓撲[4],其由單相整流器、中間直流環節、三相逆變器和牽引電機組成,如圖1 所示。其中,單相整流器會導致中間直流電壓中含有2 倍網壓頻率的脈動分量,當牽引電機工作頻率接近2 倍網壓頻率時,直流側脈動分量會導致“拍頻”現象的發生,引起系統損耗、電機溫升和轉矩脈動的增大,以及機械振動加劇等嚴重問題[5]。
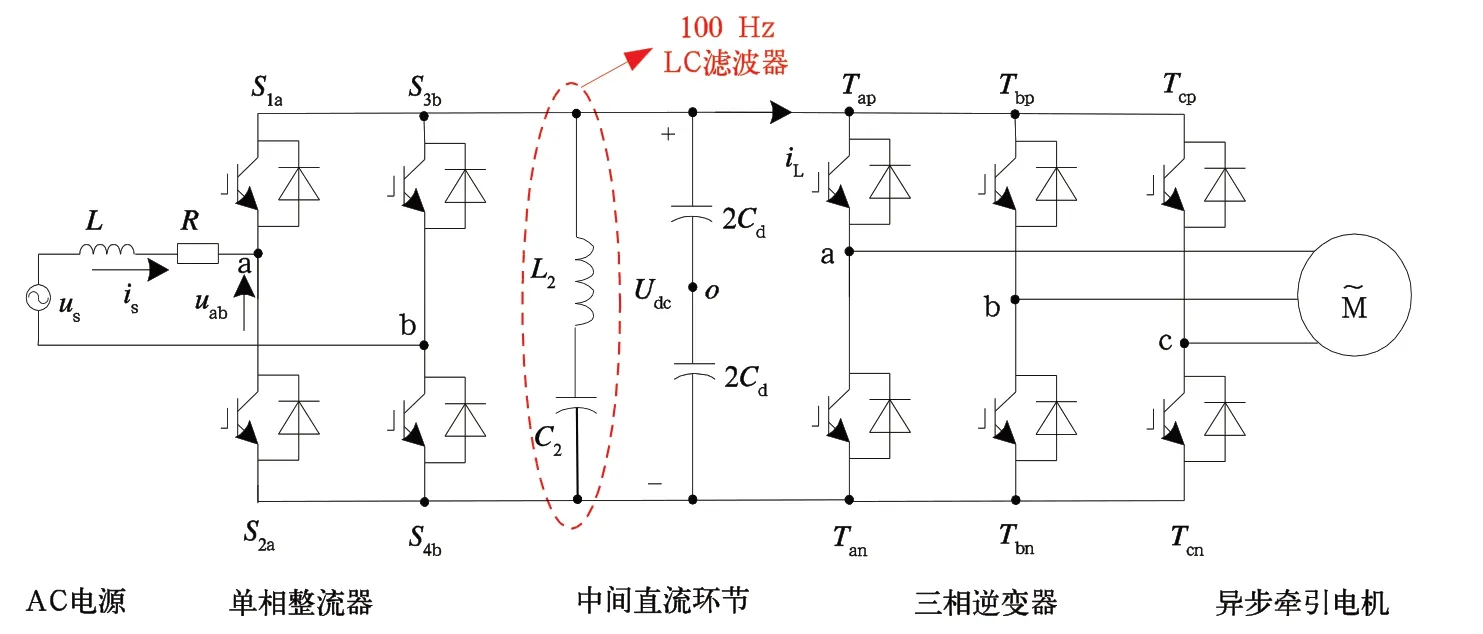
圖1 交-直-交電力牽引傳動系統拓撲
目前,較多采用增加硬件吸收裝置的方法抑制拍頻現象,如圖1 所示,在中間直流環節并入LC 諧振支路,用于吸收中間直流電壓的脈動分量。由于動車組正常運行時的中間直流電壓通常為2~3 kV,且諧振頻率僅為100 Hz,因此LC 諧振支路具有較大的體積和質量[1],導致列車整體質量的增加,以及運營和設備維護成本的增大,同時也一定程度影響牽引系統的可靠性[6-7]。
因此取消LC 諧振支路,通過控制策略抑制2倍脈動分量對牽引傳動系統的不利影響,具有重要的實用價值。文獻[8-9]提出了基于調制度補償的拍頻抑制算法,但是由于存在采樣零階保持誤差,相應補償誤差較大。文獻[10]對基于調制度補償的方法進行了改進,采用內模控制器對下一周期直流電壓平均值進行預測,以減小補償誤差。但是當電機工作于方波區時調制度恒定為1,文獻[8-10]中的算法都將失效。文獻[11-12]提出了一種基于單周期控制的拍頻抑制算法,依據伏秒平衡原理調整開關切換時刻來實現拍頻抑制,但該類算法基于模擬電路實現,難以實際應用。文獻[4]提出了一種頻率補償算法,通過修正電機定子頻率以實現拍頻抑制。但是在實際工程應用時,通常因控制頻率較低導致頻率補償量存在偏差,實際效果欠佳。
文中首先分析了牽引傳動系統的拍頻現象產生機理,對比了現有拍頻抑制算法的優缺點,針對既有方法工程應用時存在的問題,給出了一種帶有采樣補償的改進型算法,可有效提升拍頻抑制的效果,并在半實物實時仿真平臺上對該算法的有效性和可行性進行了驗證。
1 拍頻現象產生機理
動車組牽引傳動系統單相整流器本身的特點決定了其輸出直流電壓必然包含2 倍網壓頻率的脈動分量。若只考慮基波分量,則網側電壓us和網側電流is可以表示為式(1)、式(2):

式中:Us表示網壓基波有效值;Is表示網流基波有效值;φ表示基波電壓電流之間的夾角;ωn表示網壓角頻率。
則牽引變流器的網側輸入功率Pin可表示為式(3):

根據網側變流器的等效數學模型,其輸出功率Pout為式(4):

式中:Udc和u~dc分別為直流側電壓udc的平均值和波動量;IL為直流側負載電流的平均值;Cd為直流側電容。
由式(3)和式(4)可以看出,整流器輸入功率、輸出功率均由穩態分量和動態分量組成。理想情況下,交流側瞬時輸入功率和直流側瞬時輸出功率相等,則根據能量守恒原理,可得式(5):
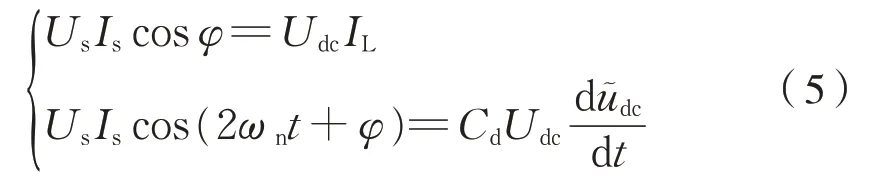
則直流側電壓紋波u~dc可表示為式(6):

由式(6)可以看出,直流側紋波電壓波動頻率為網壓頻率的2 倍,其幅值與輸入功率成正比,與直流側電容值成反比。
令

則直流電壓可表示為式(8):

在理想條件下,牽引逆變器脈寬調制的開關函數Sh(t)(h=u,v,w)可表示為式(9):
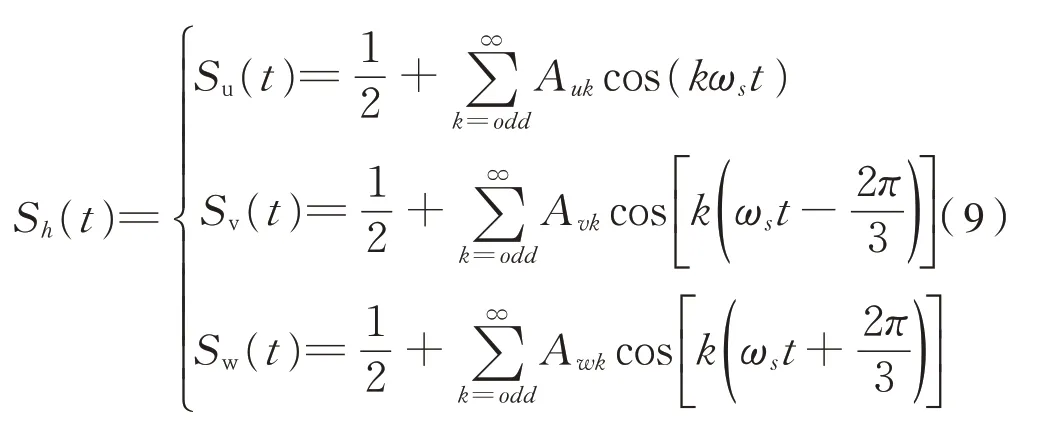
式中:ωs表示牽引逆變器輸出電壓的角頻率;Auk、Avk、Awk分 別 代 表u、v、w相 的 第k次 諧 波 電 壓 的峰值。
聯立式(8)與式(9),可得逆變器輸出相電壓為式(10):

式中:

由式(10)可知,逆變器輸出相電壓中存在諧波分量,其中等式右側第1 項是由直流電壓穩態分量導致的奇次諧波分量,第2 項、第3 項是由拍頻導致的諧波分量。考慮到Ahk的取值與頻率成反比,因此當角頻率為2ωn±ωs(也即k=1)時,拍頻分量導致的諧波分量最大。
2 拍頻抑制原理及其改進方法
2.1 基于頻率補償的拍頻抑制算法[4]
基于頻率補償的拍頻抑制算法通常在逆變器輸出頻率上疊加補償量,即通過調節瞬時頻率達到一個開關周期內的伏秒平衡。
加入頻率補償分量時,逆變器瞬時輸出頻率fi可表示為式(11):

式中:Δfr為頻率補償系數;fs為牽引逆變器平均頻率值;φr為補償量的相位角。
根據式(9)與式(11),可將開關函數重新表示為式(12):
式中Jn(x)為n 階貝塞爾函數。僅考慮消除頻率為2ωn-ωs的電壓分量,則令k=1。且考慮到C 的取值遠遠小于1,則令J0(C)=1、J1(C)= C/2。則式(13)可進一步簡化為式(14):

聯立式(8)與式(14),可將牽引逆變器輸出相電壓uuo(t)可表示為式(15):

由式(15),當ΔUdcAu1=Au1CUdc時,可以消除頻率為2ωn-ωs的電壓分量,即為式(16):

將C=πΔfr/ωn代入式(16),則頻率補償系數可表示為式(17):

根據式(17),可得基于頻率補償的拍頻抑制算法實現框圖,如圖2 所示。圖中,牽引傳動系統電機側控制采用“矢量控制+多模式調制”的控制策略,通過對中間直流電壓進行實時采樣和濾波處理,計算出頻率補償值,進而得到補償后的定子頻率再用于矢量控制計算,以實現拍頻抑制。
2.2 帶有采樣補償的改進方法
在工程應用時,牽引傳動控制主要采用數字控制器實現。由于在恒定的控制周期內進行采樣,不可避免存在采樣和計算延時導致的控制偏差,造成現有拍頻抑制算法在實際應用時效果不佳。
根據2.1 節分析,在理想情況下,計算Δfr時,應在1 個采樣周期Ts內完成計算,如圖3(a)中淺黑線所示。但由于采樣和控制計算導致的延時,將引入約1 個控制周期的滯后,即在后1 個周期計算完成時才能獲得Δfr的計算值,如圖3(a)深黑線所示。此時的頻率補償量與k+1 時刻實際應采用的補償值存在偏差,從而影響到實際拍頻抑制效果。
當牽引傳動系統運行功率穩定時,由式(6)可知,整流器直流側輸出電壓紋波可表示為一個含正弦函數的乘式,因此其取值也呈現周期性變化。而根據式(10)可知,逆變器輸出相電壓中的諧波分量也呈周期性復現[1]。
如圖3(b)所示,當系統運行功率穩定時,直流電壓紋波第N+1 個周期內k時刻采樣點的值與第N個周期內k時刻采樣點的值較為接近。考慮到采樣時延等因素,可將直流電壓第N個周期內k+2 時刻的采樣值作為第N+1 個周期內k時刻采樣的預測值,用以對采樣誤差的補償,相應步驟如下:
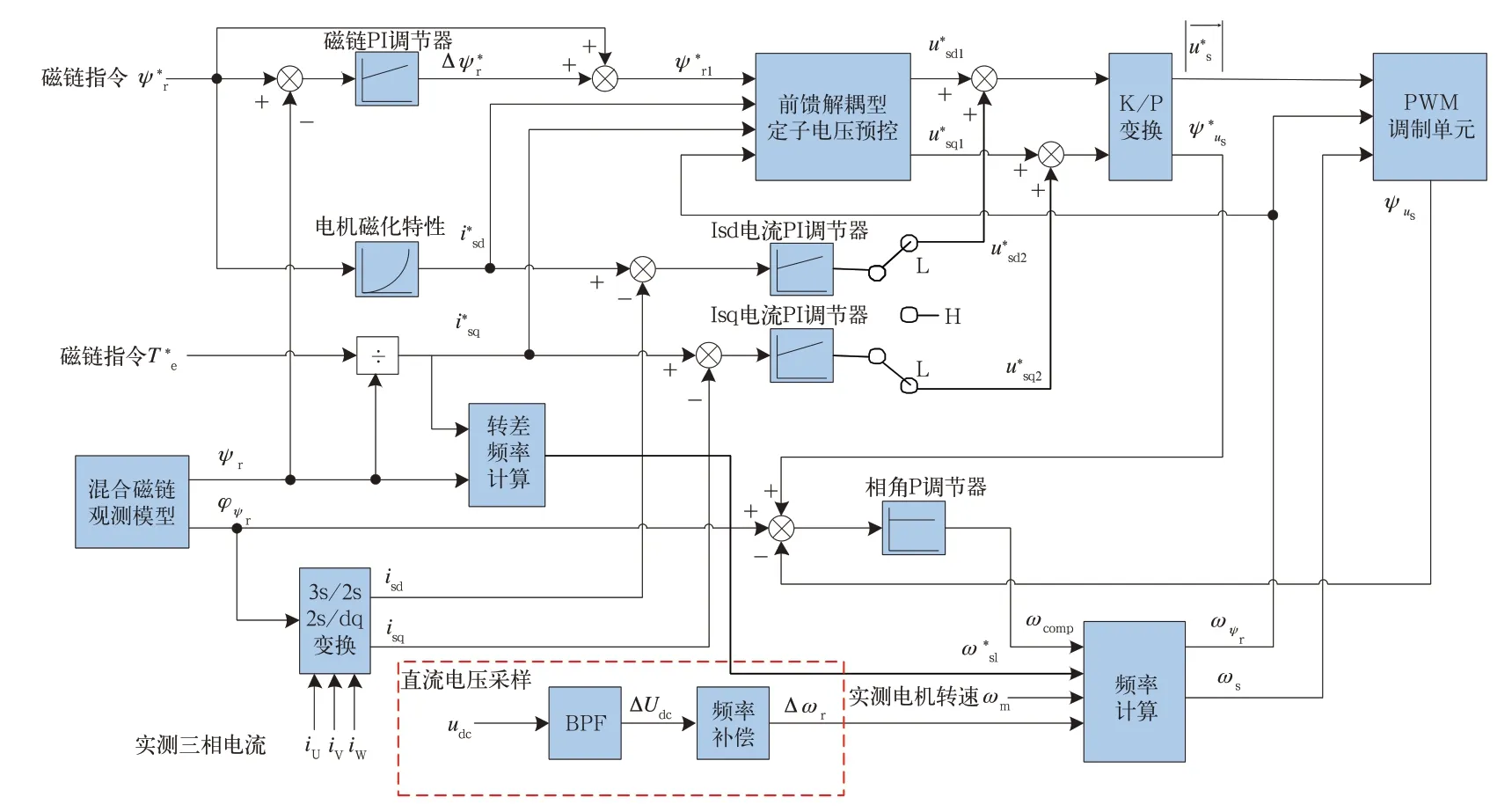
圖2 頻率補償拍頻抑制算法實現框圖

圖3 采樣延時與補償原理
(1)獲取中間直流電壓第N個周期內的K個連續采樣點的值作為歷史數據保存到數組中,記為:

(2)若當前控制周期采樣時刻對應于中間直流電壓第N+1 周期內的第k個采樣點,則用于計算補償量的電壓按式(18)取值:

式中:uin、uout分別表示直流電壓歷史采樣值及輸出預測值;T(N)、T(N+1)分別表示第N個、第N+1個周期。
(3)用當前控制周期的采樣值更新保存的歷史數據值。
根據式(17)和(18),可得到修正后的角頻率補償量為:

3 半實物仿真研究
為了驗證文中所研究拍頻抑制算法的有效性,利用牽引系統半實物實時仿真平臺對相關算法進行了測試及對比分析。
仿真模型中電機參數見表1。牽引傳動系統仿真模型采用“架控”方式,即牽引逆變器輸出側并聯2 臺牽引電機。在仿真驗證過程中,牽引逆變器主要采用5 分頻調制模式和3 分頻調制模式。
3.1 牽引工況測試結果
在系統無LC 諧振支路且工作在牽引工況下,當電機頻率約為102 Hz 時,分別給出無拍頻抑制、不帶采樣補償的拍頻抑制、帶有采樣補償的拍頻抑制3 種算法下的測試結果。輸出轉矩波形如圖4所示,定子電流波形如圖5 所示,定子電流的FFT結果如圖6 所示。
根據圖4、圖5 可知,不采用拍頻抑制算法,電機牽引工況穩態運行時,轉矩脈動較大,定子電流畸變嚴重。加入拍頻抑制算法后,轉矩脈動明顯減小,定子電流畸變明顯改善。相比之下,帶有采樣補償的拍頻抑制算法的抑制效果更好。
根據圖6 所給出定子電流FFT 結果可知:在不采用拍頻抑制算法時,2 Hz 脈動分量約為76%;采用不帶采樣補償的拍頻抑制算法后,2 Hz 諧波分量減少為18.5%;采用帶有采樣補償的拍頻抑制算法后,2 Hz 脈動分量減少為8.1%,抑制效果明顯提升。
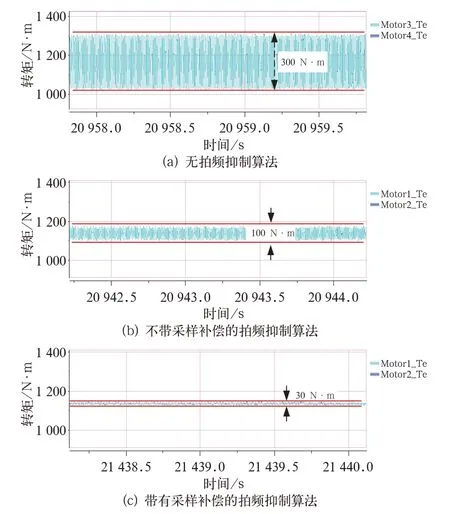
圖4 牽引工況下輸出轉矩波形
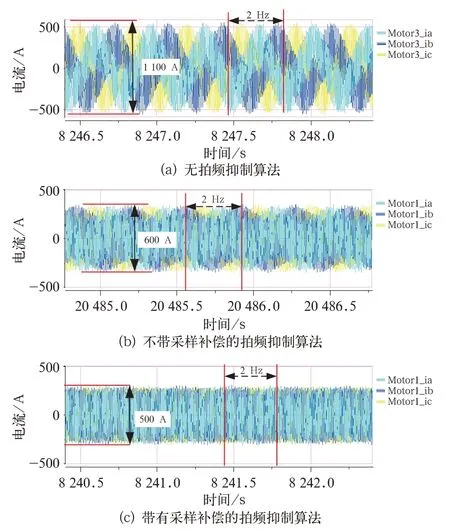
圖5 牽引工況下定子電流波形

圖6 牽引工況下定子電流的FFT 結果
3.2 制動工況測試結果
在系統無LC 諧振支路且工作在制動工況下,當電機頻率約為95 Hz 時,分別給出無拍頻抑制、不帶采樣補償的拍頻抑制、帶有采樣補償的拍頻抑制3 種算法下的測試結果。輸出轉矩波形如圖7所示,定子電流波形如圖8 所示,定子電流的FFT結果如圖9 所示。
根據圖7、圖8 可知,不采用拍頻抑制算法、電機制動工況穩態運行時,轉矩脈動較大,定子電流畸變嚴重。采用拍頻抑制算法后,轉矩脈動明顯減小,定子電流畸變明顯改善。相比之下,帶有采樣補償的拍頻抑制算法的抑制效果更為顯著。
根據圖9 所給出的定子電流的FFT 結果可知,在不采用拍頻抑制算法時,5 Hz 諧波分量約為99%;采用不帶采樣補償的拍頻抑制算法后,5 Hz諧波分量減少為13.5%;采用帶有采樣補償的拍頻抑制算法后,5 Hz 諧波分量減少為5%;抑制效果明顯提升。
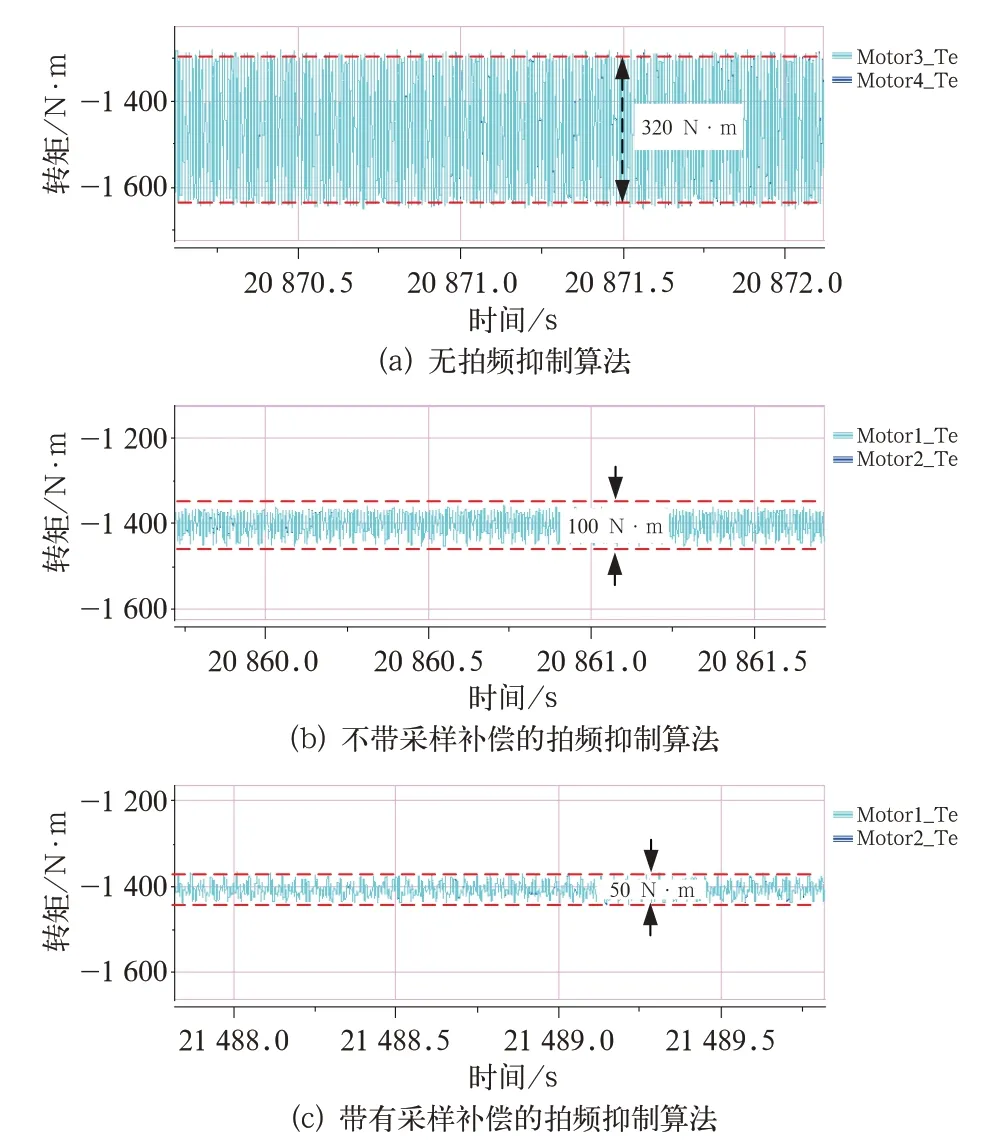
圖7 制動工況下輸出轉矩波形
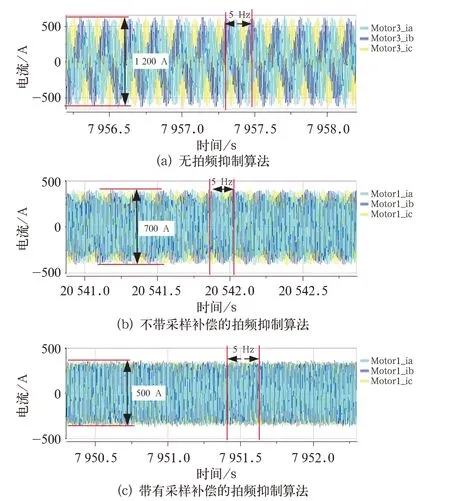
圖8 制動工況下定子電流波形

圖9 制動工況下定子電流的FFT 結果
4 結 論
主要對高速動車組牽引傳動系統取消LC 諧振支路后的電機側拍頻抑制算法進行研究。
文中研究和分析拍頻現象產生機理和基于頻率補償的拍頻抑制算法,考慮控制算法在工程應用時存在的問題,結合中間直流電壓2 倍脈動分量的特點,提出了一種帶有采樣補償的改進算法,并介紹了其實現方法,完成了半實物仿真驗證。仿真結果表明改進算法可以有效提升牽引傳動系統無LC 諧振支路情況下的拍頻抑制效果,具有較好工程應用與推廣價值。