成莊礦無軌膠輪車調度系統研究
2021-05-21 12:01:04趙越仁
煤礦現代化 2021年3期
關鍵詞:系統
趙越仁
(晉能控股煤業集團成莊礦,山西 晉城 048000)
0 引 言
無軌膠輪車具有車型多樣、靈活高效、運輸成本低以及運量高等優點,在煤礦井下輔助運輸中應用逐漸普遍[1-2]。成莊礦近些年來通過技術改造,井下輔助運輸中無軌膠輪車已逐漸替代調度絞車、齒軌卡軌車、無極繩絞車等運輸方式。但受井下巷道斷面面積以及無軌膠輪車體積限制,尤其是遇到支架搬運車、鏟車等大型車輛運輸時,絕大多數巷道寬度無法滿足無軌膠輪車錯車要求,因此,必須采用分區段單向單車運行控制方式。膠輪車輔助運輸系統運行主要通過人工調度實現,從而使得無軌膠輪車運行效率低,車輛運行安全保障能力較差。特別是巷道內有兩輛對向行駛的無軌膠輪車時,駕駛人員通過對講機相互聯絡,不僅存在通信效率低下而且生產、工作效率均不能滿足礦井高效生產需要。
為了提高成莊礦無軌膠輪車運輸效率及運行安全保證能力,提出采用先進的網絡通信以及電子信息技術設計一種無軌膠輪車調度系統,實現對井下所有無軌膠輪車運行的安全、高效調度,從而在一定程度上提升成莊礦輔助運輸系統工作效率。
1 無軌膠輪車調度系統總體結構

圖1 調度系統總體結構
無軌膠輪車調度系統應在滿足國家相關規范、標準基礎上,適應煤礦井下長時間連續工作以及運行環境惡劣等需要。無軌膠輪車運行由地面指揮中心統一調度,操控界面直觀、便于調度。調度系統綜合無線網絡通信、車輛定位、調度智慧、車載視頻監控等技術,可實現車輛防追尾、運行狀態實時監控、車輛調度管理、數據查詢以及司機管理等功能,實現無軌膠輪車有序工作[3-4]。
調度系統的關鍵組成包括有井下無軌膠輪車定位系統、無線網絡系統、膠輪車車載終端系統以及安全管控系統等。調度系統各功能模塊構成見圖1 所示。
2 關鍵子系統分析
2.1 無線通信網絡
在成莊礦地面辦公區均布置有無線通信網絡,因此在井下主要輔助運輸巷構建無線網絡系即可滿足無軌膠輪車監控需要。無線網絡系統包括有eSCN230 核心網、地面基站、KTZ319-Z 光電轉換器、UPS 電源、交換機、融合通信調度系統等構成。由于地面無線網絡已實現全覆蓋,文中重點對井下無線網絡構建進行闡述。
井下無線通信系統主要由本安型基站、UPS 電源等構成。井下巷道布置基站時基站天線向巷道左右2 個方向覆蓋,巷道條件不同,基站的有效覆蓋范圍也存在明顯差異。在坡度小、平直巷道內基站有效覆蓋半徑可達到1 000 m,在有較大坡度的巷道基站有效覆蓋半徑降低至750 m,當巷道內存在多個轉彎點時基站有效覆蓋范圍為500 m。
根據井下無軌膠輪車行走路線,在4105 巷、4102 巷、四五聯絡一巷、5102 巷等巷道內布置足夠數量的無線基站。井下無線基站通過光纖與地面KTZ319-Z 光電轉換器連接。根據現場需要將無線網絡組網方式為鏈型組網。
2.2 無軌膠輪車、人員定位
無軌膠輪車高效調度的基礎工作之一就是精準掌握各無軌膠輪車位置。以往煤礦井下定位一般采用區域定位技術,該定位技術精度較低,難以滿足無軌膠輪車高效調度需要。近些年來隨著科學技術發展,煤礦礦車等機電設備定位技術也不斷發展,特別是基于UWB 的定位技術應用,為無軌膠輪車定位精準定位提供了可靠選擇,該定位技術定位精度可達到30 cm,可滿足井下無軌膠輪車調度需要[5]。具體基于UWB 的定位技術原理見圖2。
成莊礦無軌膠輪車、人員定位采用基于UWB 的定位技術。井下定位系統包括有車載定位裝置、定位基站、人員定位裝置以及位置計算模塊。車載定位裝置用以定位無軌膠輪車實時位置、人員定位裝置用以確定需求方位置,定位裝置中的定位卡采用UWB協議將位置信息傳輸給定位基站并通過無線網絡將位置信息傳輸給地面監控中心。在地面監控中心顯示器上可事實顯示無軌絞車位置、人員位置[6-7]。通過精準掌握無軌膠輪車、工作人員位置,并通過無線通信網絡即可搭建無軌膠輪車供給方以及需求方間信息傳輸通道,在確保安全的前提下提高無軌膠輪車運行能效。
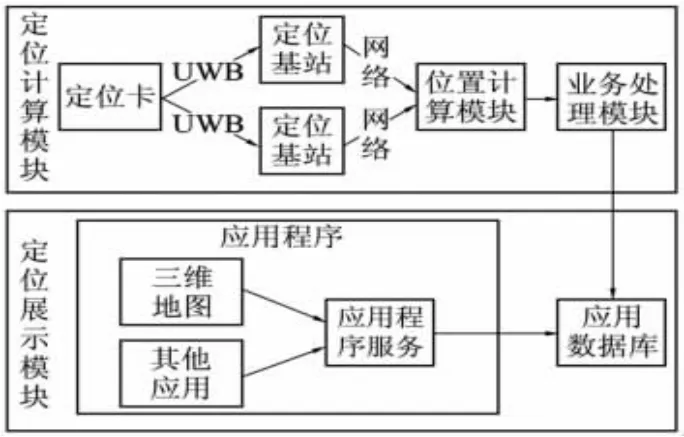
圖2 基于UWB 的定位技術原理圖
2.3 無軌膠輪車運行安全管控
為了提高無軌膠輪車運行保障能力,調度系統集成了井下定點測速、交通信號重要路口(巷道交匯位置)語音報警、區段測速以及視頻監控等數據,通過調度系統內嵌的軟件分析處理后,根據井下需要可控制重要路口紅綠燈狀態,從而控制無軌膠輪車停止、避讓以及行進等操作,確保無軌膠輪車可順暢運行。通過融合監測到的實時數據,可在一定程度上規范駕駛員行為,不僅解決無軌膠輪車運行擁堵問題,而且提升了輔助運行系統安全管控水平。
2.4 車載終端接入
車載終端通過無線網絡與地面調度中心聯通,從而建立了無軌膠輪車司機與調度中心間的信息交互通道,具體無軌膠輪車車載終端各操作界面見圖3。車載終端人機交互界面可實時顯示無軌膠輪車狀態參數,并顯示調度中心發出的調度指令。無軌膠輪車司機根據自身情況對是否接受指令進行判定,當接受指令調度中心根據需求方位置向車載終端發出導航信息。

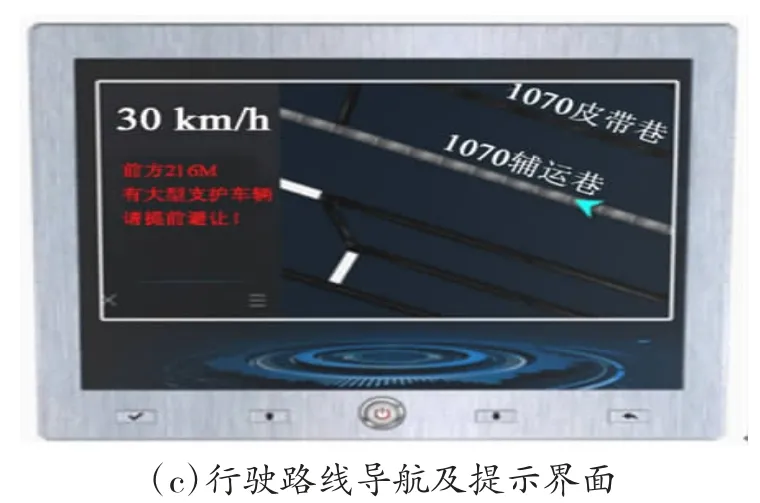
圖3 車載終端操作界面
同時車載終端接入車載視頻信號(包括倒車影像、車廂影像),駕駛員可通過車載視頻掌握無軌膠輪車內外環境情況,同時視頻信號通過無線網絡傳輸至地面監控中心進行存儲,存儲時間為7 d。
3 調度系統軟件構成
3.1 軟件架構
調度系統軟件由客戶端、服務端兩部分構成。服務端通過井下無線網絡將信車輛位置信息、需求方位置信息以及車輛行駛狀態等傳輸到地面監控中心,調度系統按照預先控制邏輯以及車輛行駛規則發出紅綠燈控制指令,從而實現無軌膠輪車的有序通行。
3.2 調度軟件功能
1)巷道監控顯示。在表示層通過不同顏色表示不同巷道位,并顯示出無軌膠輪車在巷道內的滯留、行駛時間,行駛速度。實時顯示巷道內無線基站、定位裝置等設備的運行情況。當發現通信網絡出現故障時會技術發出預警信息,并通過報表記錄故障時間、類型等參數。
2)車輛運行指揮。調度系統采用基于UWB 的定位技術對無軌膠輪車進行定位、跟蹤,并實時顯示車輛位置及運行狀況。車輛運行指揮通過控制各巷道內紅綠燈實現,通過合理控制紅綠燈指揮無軌膠輪車有序駛入特定巷道或者在錯車區等待,從而確保人員、車輛可平穩通行。調度系統控制主機根據現場監測結果發出控制指令實現車輛合理調度。若井下遇到緊急情況時可手動控制信號等顏色,或者發出警報信息,提醒井下人員及時撤離。
3)車輛智能調度。根據井下各無軌膠輪車位置、工作狀態以及需求方位置,調度軟件會自動生產調度指令,具體調度算法根據已經研究成果確定,生成調度指令后需要調度員再次確定后向無軌膠輪車發出調度指令。司機接收指令后按照調度系統生產的運行路線行駛至需求方位置,從而實現車輛的智能調度。
4 結 論
結合成莊礦無軌膠輪車調度情況,提出綜合無線傳輸、精準定位等技術的無軌膠輪車調度系統,并對該系統的結構組成、主要功能等進行闡述。提出的智能調度系統以輔助運輸巷無線通信為基礎,通過集成車輛位置、需求方位置、運行情況等情況,調度系統會自動發出調度指令。駕駛員接收調度指令后,依據調度系統給出的運行路線行駛,從而實現井下無軌膠輪車的高效調度及安全運行。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
