
雙源無軌電車氣動控制型集電器及其應用效果
2021-05-24 08:33:36北京公共交通控股集團有限公司
城市公共交通 2021年4期
關鍵詞:駕駛員
北京公共交通控股(集團)有限公司 孫 宇
雙源無軌電車的電能來源有兩部分,一部分來源于線網高壓電源,另一部分來源于車輛本身配置的動力電池,由于配置的動力電池容量有限,雙源無軌電車的驅動主要源自線網高壓電源。集電器是無軌電車從架空線網獲取電能的裝置,當集電器搭觸架空線網時,集電桿頂端的集電頭與線網觸線連通,架空線網的高壓電通過DCDC隔離電源整流后傳遞給動力電池或驅動電機,為車輛提供源源不斷的動力。氣動控制型集電器是一種新型集電器,是對傳統集電器的升級改造,有著明顯的先進性和可推廣性。
1 無軌電車傳統集電器結構原理與存在問題
1.1 傳統集電器結構及工作原理
雙源無軌電車傳統集電器主要由升降機構、集電機構、旋轉機構、控制機構和固定機構等部分組成,傳統集電器如圖1所示。
升降機構是安裝在旋轉機構上可以使集電桿升桿和降桿的機構,主要包括舉升彈簧總成、降桿氣室、集電桿前叉和壓集電桿搖臂等。當集電桿降桿時,駕駛員按下降桿按鈕,降桿氣室內的氣壓增加,推動壓集電桿搖臂下壓集電桿前叉,使集電機構脫線;升桿時,集電頭需位于捕捉器正下方,駕駛員按下升桿按鈕,降桿氣室解除壓力,在舉升彈簧總成拉簧作用下集電機構向上運動,此時集電頭通過捕捉器接觸至架空線網,使得整車電路與架空線網連通。
固定機構是在集電桿下落到位后將其固定、防止集電桿左右晃動的機構。集電桿降至車頂處時,車頂尾部兩個向下彎折的回轉掛鉤限制了集電桿水平旋轉,限位示意如圖2所示,升桿時,首先操控升降機構的降桿氣室將集電桿下壓,再將回轉掛鉤旋轉一個角度,解除對集電桿上升空間的限制,集電桿即可順利完成上升動作。此外,當集電桿被掛鉤限位鎖定時,旋轉機構的鎖定閥門也會接通,壓縮空氣經電磁閥進入水平旋轉鎖定氣缸,推動活塞桿鎖定旋轉器。通過雙重鎖定,集電桿的左右旋轉功能被限制。
1.2 傳統集電器存在的問題
(1)自動捕捉成功率較低。由于傳動集電器捕捉成功的關鍵取決于車輛停靠的位置是否合適,僅當雙源無軌電車的集電頭停靠在捕捉器正下方時,集電器捕捉線網時才會捕捉成功。因此傳統集電器對駕駛員的駕駛技術要求較高,每當車輛停靠偏離捕捉器時,均會造成捕捉失敗。

圖1 傳統集電器實物圖
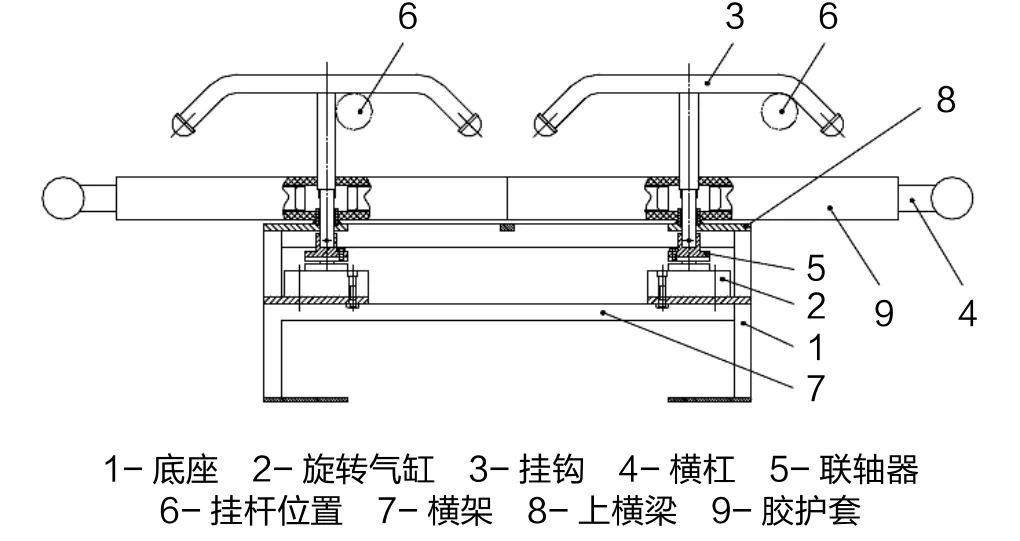
圖2 固定機構結構圖
(2)手工搭桿存在安全隱患。當集電器自動捕捉未能成功時,需要駕駛員或乘務管理員下車手動搭桿,基本上需要2-3min或者更長時間,容易造成交通不暢。駕駛員或乘務員下車搭桿時,身體暴露在車流中,存在較大的安全隱患。
(3)故障率較高。傳統集電器解除降桿壓力時,由于拉簧的拉力較大,集電桿接觸線網時集電頭會對架空線網造成一定程度的沖擊,長此以往會影響集電頭的使用壽命,致使集電頭故障率較高。
2 氣動控制型集電器結構原理與功能特點
氣動控制型集電器是一種采用氣動控制、圖像識別技術實現集電桿自動捕捉線網的新型集電技術,具有先進的自動識別捕捉技術、脫線主動和被動安全技術,可有效解決傳統集電器的諸多問題。相對于傳統集電器,氣動控制型集電器主要對集電器的基座總成及尾部收桿座總成部分進行了升級和優化,集電桿和集電頭部分延用傳統集電器的結構和技術。
2.1 氣動控制型集電器主要結構
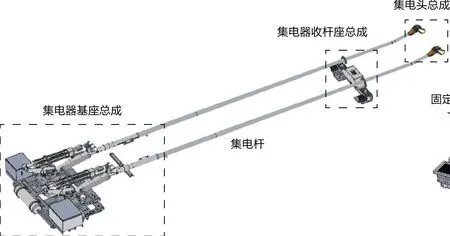
圖3 氣動控制型集電器主要構造
氣動控制型集電器主要由基座總成、集電桿、收桿座總成、集電頭總成等部分組成,整體構造如圖3所示。
(1)基座總成。氣動控制型集電器基座總成是集電桿的支撐部分,主要由四連桿機構、拉力彈簧、底座組件、電控單元和氣控單元等部分組成(圖4),主要作用是控制和執行集電桿的水平旋轉和垂直運動,是新型集電器的核心機構。
(2)收桿座總成。氣動控制型集電器收桿座總成主要用于集電桿的固定及對捕捉器的圖像采集和識別,由固定鉤總成、攝像頭、補光燈等部分組成(圖5)。
2.2 氣動控制型集電器工作原理
氣動控制型集電器具有自動捕捉、自動搭網功能,因此除正常智能控制外,還必須具有捕捉器信號采集、氣缸水平控制定位功能。按功能模塊劃分,氣動控制型集電器主要包含整車開關信號采集、整車網絡通信、捕捉器信息采集、高壓信號采集、氣壓檢測、電磁閥驅動、傳感器信號檢測、攝像頭清洗驅動、視頻模組驅動等九大功能模塊。
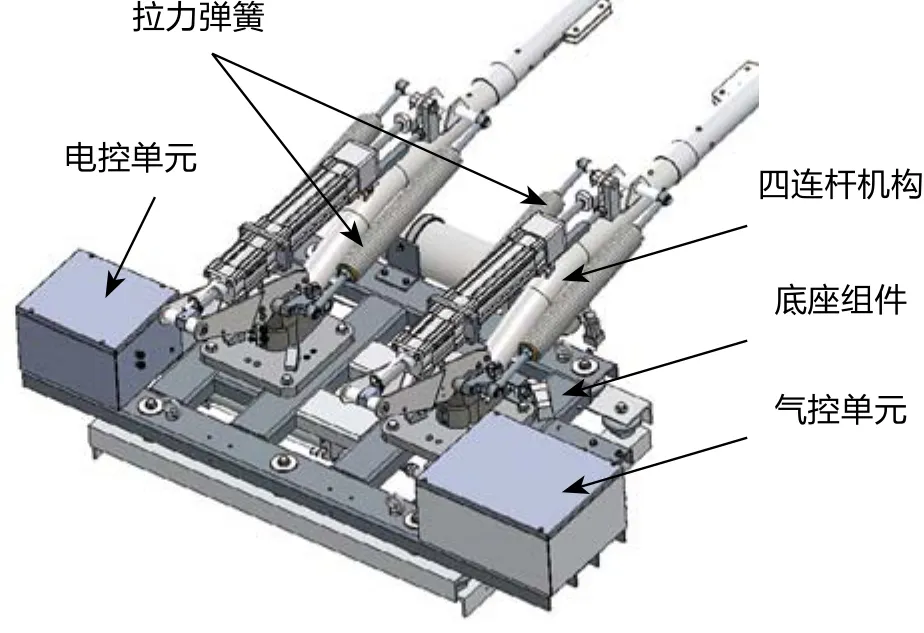
圖4 基座總成主要構造
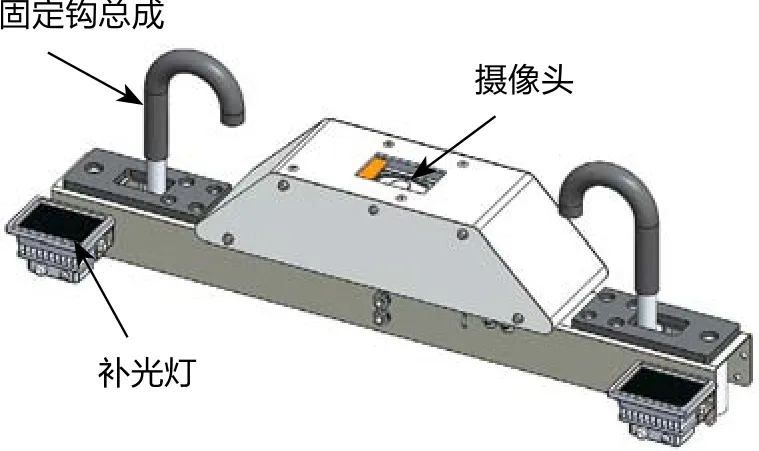
圖5 收桿座總成主要構造
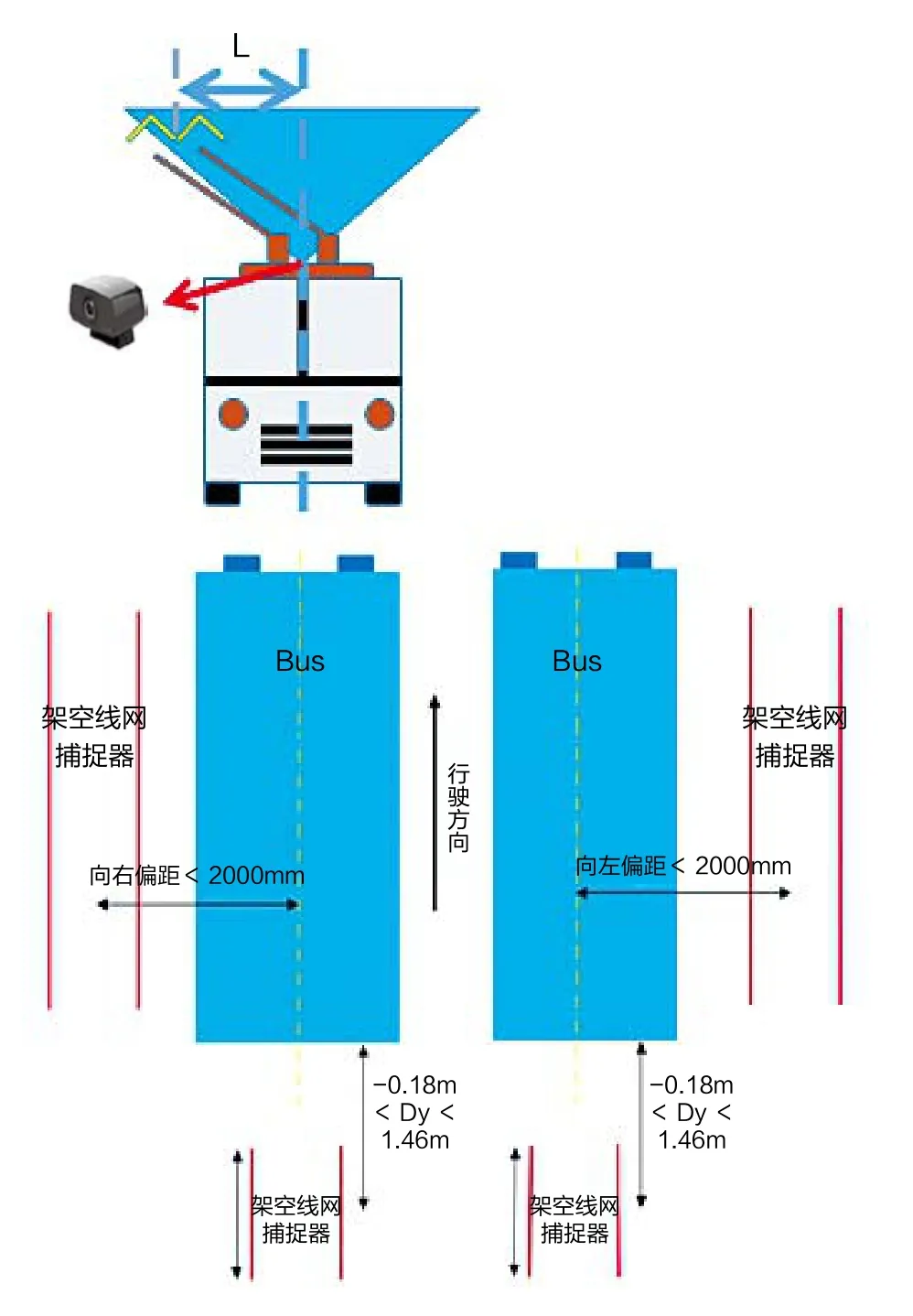
圖6 車輛停靠位置示意圖
氣動控制型集電器工作原理如下:駕駛員將車輛停在架空線網捕捉器下,其中車輛停靠的左偏距或右偏距(車輛中心線到架空線網中心線的距離)不大于2m,如圖6所示。駕駛員按下上升按鈕,電控單元給出信號,電磁閥先驅動集電桿向下運動使其脫離尾鉤限制,然后固定鉤總成把尾鉤打開,電磁閥驅動使集電桿緩緩升起;同時電控單元發送識別捕捉器指令,設置在車頂的攝像頭捕捉線網捕捉器的影像(捕捉器下邊緣倒三角特征),圖像處理單元分析捕捉器影像與攝像頭之間的相對位置關系,從而確認車輛與線網之間的偏距,計算出集電桿旋轉角度,此時搖擺電磁閥驅動集電桿旋轉至相應位置;集電桿在電磁閥的驅動下繼續上升直至捕捉到線網,具體控制策略如圖7所示。
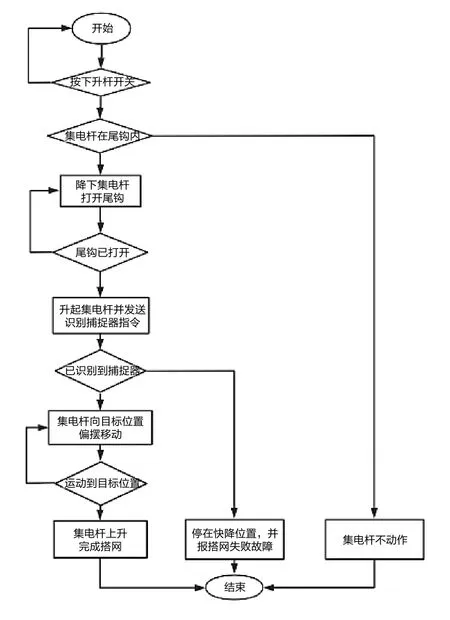
圖7 氣動控制型集電器控制策略
氣動控制型集電器利用優越的視覺軟件算法,克服戶外環境對視覺影像的干擾,極大提高了視覺影像偏距捕捉成功率。通過特定的偏擺運動算法,實現了大慣量情況下集電桿的擺動控制及精確定位,從而奠定了高成功率的自動捕捉功能。
2.3 氣動控制型集電器功能特點
氣動控制型集電器通過氣缸運動控制集電桿的垂直和水平運動,實現集電桿的自動捕捉線網功能,與傳統集電器相比,主要有以下特點:
(1)具有集電桿自動捕捉線網功能。在車輛偏離線網中心2m范圍內可實現集電桿的自動捕捉,無需駕駛員手動搭桿。
(2)具有集電桿脫線主動保護功能。在發生大角度偏擺、集電桿脫網、線網有障礙物等情況下,無需駕駛員操作可實現集電桿主動快速降桿回中到快降位置鎖緊,保護車輛、線網及道路交通安全。
(3)具有集電桿被動保護功能。設有緊急降桿按鍵,車輛在運營期間若發生任何緊急狀況,駕駛員可通過操縱緊急按鍵,快速實現集電桿被動脫線保護至快降位置鎖緊,脫線保護快速降桿執行時間小于2s。
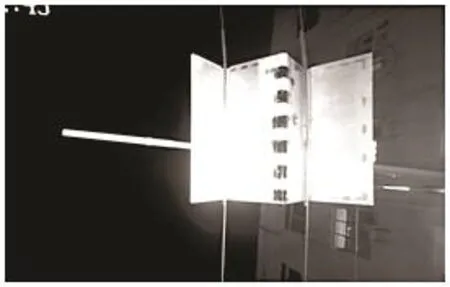
圖8 夜間環境采集的捕捉器圖像
3 氣動控制型集電器應用效果
截至2021年2月,氣動控制型集電器在北京公交BJD-WG120FK型雙源無軌電車上應用測試6個月,氣動控制型集電器各項功能實現情況及整體應用效果良好。
(1)系統功能性。氣動控制型集電器可在車輛中心線偏離線網中心±2m范圍內實現自動捕捉線網功能,對車輛停放位置要求較為寬松,而傳統集電器對車輛停放位置要求非常嚴苛,車輛必須停放在捕捉器正下方。相比而言,在集電器捕捉線網過程中,新型集電器降低了對駕駛員駕駛能力的要求,同時提升了車輛的運行效率。
此外,在夜間測試環境下,收桿座總成的LED補光燈可有效保證圖像采集裝置清晰、準確地采集到捕捉器圖像(圖8),保證集電桿在夜間環境精準捕捉到線網。在雨天環境下,收桿座總成具有圖像采集裝置擦拭功能,可保證鏡頭在雨天或其他惡劣天氣下始終處于清潔狀態,同時圖像采集裝置安裝在防護罩內,采集圖像時絕緣滑蓋可自動打開,使視覺影像得到有效防護(圖9)。
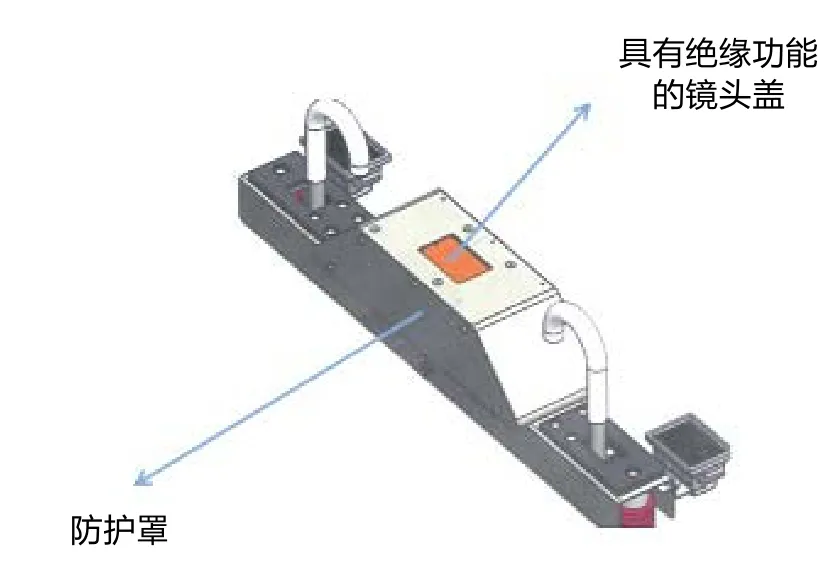
圖9 收桿座總成鏡頭保護功能示意
(2)系統可靠性。統計分析氣動控制型集電器在整個測試期內的自動捕捉功能運行情況可知,氣動控制型集電器在操作升桿開關到集電桿自動捕捉線網動作完成所需時間及操作降桿開關到集電桿完成收桿動作所需時間均在15s內,可滿足集電桿自動捕捉的時間要求,提升自動捕捉效率。同時通過統計分析集電器的一次捕捉完成情況可知,氣動控制型集電器在整個測試期內的自動捕捉成功率在90%左右,而傳統集電器的一次捕捉成功率一般在65%左右,氣動控制型集電器的自動捕捉成功率大大提升。
(3)系統安全性。按照雙源無軌電車產品耐壓標準對氣動控制型集電器進行絕緣和耐壓測試,絕緣測試結果為高壓對車身絕緣阻值大于200MΩ;對系統進行3500VAC/60s/50Hz條件下的耐壓測試,漏電電流小于10mA,表面無跳火和絕緣材料擊穿等現象,滿足雙源無軌電車的耐壓性能要求。
此外,還驗證了氣動控制型集電器的主動與被動脫線保護功能。在車輛發生大角度偏擺、集電桿脫網、線網有障礙物等情況下,主動脫線保護功能可實現集電桿自動快速降桿至快降位置并鎖緊的功能,氣動控制型集電器脫線保護降桿迅速,執行時間短,一般在1.7s左右,可有效避免降桿時間過長集電桿橫掃周圍障礙,引發重大運營事故的問題。當車輛在運營期間發生任何緊急狀況,駕駛員可通過緊急按鍵快速實現集電桿被動脫線保護至快降位置并鎖緊的功能,被動脫線保護快速降桿執行時間在1.7s左右。
氣動控制型集電器運行穩定,故障率較低,可有效提高無軌電車運行效率,大大降低了駕駛員的勞動強度,同時也避免了傳統集電器需駕駛員下車手動搭桿所帶來的人身安全風險,值得在雙源無軌電車上推廣應用。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
活力(2019年22期)2019-03-16 12:46:58
汽車電器(2018年1期)2018-06-05 01:22:54
紅土地(2016年6期)2017-01-15 13:45:55
汽車與安全(2016年5期)2016-12-01 05:22:10
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2014年7期)2014-02-27 07:28:09
解放軍生活(2013年5期)2013-04-29 21:51:50
