傾角傳感器穩(wěn)定性測(cè)試與分析
2021-05-26 00:54:14陳燕飛吳俊嫻司俊超
傳感器世界 2021年4期
陳燕飛 吳俊嫻 司俊超
1. 空裝駐北京地區(qū)第一軍事代表室,北京 100854;2. 北京國(guó)科艦航傳感技術(shù)有限公司,北京 100101
0 引言
角度作為一個(gè)十分重要的物理量,在軍事、工業(yè)等方面占據(jù)著十分重要的位置。傾角傳感器作為一種測(cè)量角度的儀器,被廣泛應(yīng)用于導(dǎo)彈發(fā)射導(dǎo)軌起豎角度測(cè)量以及工程設(shè)備姿態(tài)的測(cè)量。
在實(shí)際應(yīng)用中,傾角傳感器的測(cè)量重點(diǎn)是穩(wěn)定測(cè)量,因此,提高傾角傳感器測(cè)量的穩(wěn)定性就成為了重中之重。傳感器工作環(huán)境溫度變化較大[1],由于外界溫度對(duì)傳感器穩(wěn)定性影響較大,因此,本文重點(diǎn)就兩款傾角傳感器野外環(huán)境下工作穩(wěn)定性進(jìn)行試驗(yàn)和對(duì)比分析。
試驗(yàn)過(guò)程中,選取使用相同加速度計(jì)的兩款傾角傳感器處于同一野外環(huán)境中,對(duì)其進(jìn)行啟動(dòng)特性、靜態(tài)穩(wěn)定性和動(dòng)態(tài)跟隨性測(cè)試,收集兩款傳感器實(shí)驗(yàn)數(shù)據(jù)并進(jìn)行對(duì)比。
1 傳感器結(jié)構(gòu)及穩(wěn)定特性
1.1 傳感器結(jié)構(gòu)
本文選用的兩款傾角傳感器結(jié)構(gòu)相同,系統(tǒng)整體結(jié)構(gòu)框圖如圖1所示。傾角傳感器以微控制單元為核心,由測(cè)量模塊、電源模塊、通信模塊等組成。測(cè)量模塊由石英撓性加速度計(jì)作為敏感源,經(jīng)過(guò)AD轉(zhuǎn)換,將采集完成的數(shù)據(jù)通過(guò)SPI上傳至微控制單元。微控制單元將通過(guò)利用最小二乘法[2-3]和分段線性化結(jié)合獲取到的溫度補(bǔ)償數(shù)據(jù)補(bǔ)償至測(cè)量數(shù)據(jù)[4],通過(guò)隔離通信模塊傳輸至上位機(jī),從而實(shí)現(xiàn)了設(shè)備現(xiàn)行姿態(tài)的獲取。
在這兩款傾角傳感器中,傾角測(cè)量模塊使用的是石英撓性加速度計(jì),該加速度計(jì)具有體積小、精度高、適用溫度范圍大等優(yōu)點(diǎn)。傳感器使用的電源模塊和通信模塊都進(jìn)行了隔離處理,從而使得傾角傳感器具有更好的抗擾性。通信模塊與上位機(jī)之間使用RS422接口,該接口具有通信速度快、通信距離遠(yuǎn)、抗干擾性強(qiáng)等優(yōu)點(diǎn)[5]。

1.2 傳感器穩(wěn)定特性
傾角傳感器隨待測(cè)裝置放置在野外,不工作的時(shí)候,傳感器內(nèi)部溫度與外部環(huán)境溫度相近;當(dāng)傳感器通電啟動(dòng)后,傳感器內(nèi)部元器件開(kāi)始工作,元器件產(chǎn)生熱量,傾角傳感器的敏感元器件的精度受溫度影響。在傳感器內(nèi)部與外界環(huán)境進(jìn)行熱量交換,使溫度達(dá)到平衡的過(guò)程中,傳感器內(nèi)部溫度在不斷變化,其輸出的角度數(shù)據(jù)是不穩(wěn)定的,而不同傳感器由于設(shè)計(jì)、器件選型、制作工藝等方面的原因,使得傳感器達(dá)到穩(wěn)定的時(shí)間不同。
傾角傳感器隨待測(cè)裝置在野外環(huán)境下工作過(guò)程中,外界環(huán)境溫度產(chǎn)生劇烈變化時(shí),在傳感器與外界環(huán)境之間同樣存在著熱量交換、溫度變化的過(guò)程,傳感器會(huì)從一個(gè)穩(wěn)定狀態(tài)轉(zhuǎn)換至另一個(gè)穩(wěn)定狀態(tài),雖然這兩個(gè)穩(wěn)定狀態(tài)所測(cè)得的角度數(shù)據(jù)相同。但在穩(wěn)定狀態(tài)轉(zhuǎn)換過(guò)程中,傾角傳感器輸出數(shù)據(jù)會(huì)出現(xiàn)波動(dòng),根據(jù)輸出數(shù)據(jù)波幅值的大小可以判斷該款傾角傳感器的靜態(tài)穩(wěn)定性。
2 傳感器穩(wěn)定性測(cè)試
在傾角傳感器穩(wěn)定性測(cè)試中,根據(jù)傾角傳感器在安裝設(shè)備上面的使用情況,本文重點(diǎn)對(duì)傾角傳感器的啟動(dòng)特性、動(dòng)態(tài)跟隨性和靜態(tài)穩(wěn)定性進(jìn)行測(cè)試。本文選取測(cè)試的兩款傾角傳感器測(cè)量精度是0.016°,測(cè)試設(shè)備的傾斜角度是60°,未啟動(dòng)之前,傾角傳感器處于水平狀態(tài)。在測(cè)試過(guò)程中將所選取的兩款傾角傳感器命名為傳感器A和傳感器B。
2.1 測(cè)試目的
經(jīng)過(guò)一系列測(cè)試,獲取到傾角傳感器啟動(dòng)、動(dòng)態(tài)跟隨和穩(wěn)態(tài)特性數(shù)據(jù),以便于形成圖表進(jìn)行分析。
2.2 測(cè)試設(shè)備
本文中所選取的兩款傾角傳感器是成品,測(cè)試中將其應(yīng)用到待測(cè)機(jī)械設(shè)備作為測(cè)試設(shè)備。
2.3 測(cè)試環(huán)境
由于兩款傳感器獲取到的測(cè)試數(shù)據(jù)要進(jìn)行對(duì)比,所以將兩款傳感器的測(cè)試環(huán)境在同一時(shí)間置于相同地點(diǎn),即將測(cè)試設(shè)備放置于設(shè)備的使用地點(diǎn)。
2.4 測(cè)試平臺(tái)
測(cè)試主要是在兩臺(tái)起豎設(shè)備上進(jìn)行。在測(cè)試過(guò)程中,首先,將選取的兩款傾角傳感器安裝于測(cè)試設(shè)備的安裝位置,按照傳感器使用說(shuō)明進(jìn)行安裝;之后,對(duì)待測(cè)試的傾角傳感器進(jìn)行通電和通信檢查,保證兩個(gè)傳感器能夠正常工作;最后,按照測(cè)試步驟進(jìn)行測(cè)試,對(duì)傳感器測(cè)試過(guò)程中輸出數(shù)據(jù)全程記錄。
2.5 測(cè)試內(nèi)容
本文主要測(cè)試兩款傾角傳感器的啟動(dòng)特性、動(dòng)態(tài)跟隨性和穩(wěn)態(tài)特性,也就是測(cè)試設(shè)備的正常使用過(guò)程。由于測(cè)試的是傳感器在測(cè)試設(shè)備上面使用的整個(gè)過(guò)程,因此,測(cè)試將分為3個(gè)階段且進(jìn)行多次測(cè)試。
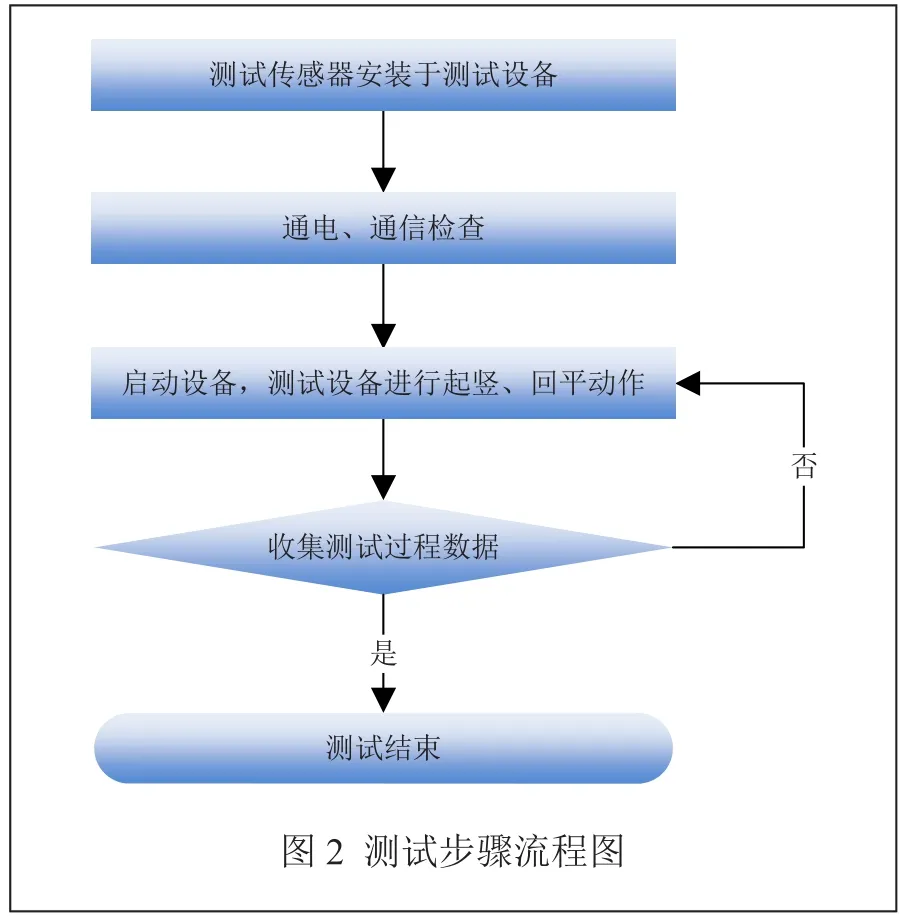
2.6 測(cè)試步驟
整個(gè)測(cè)試過(guò)程相對(duì)較簡(jiǎn)單,測(cè)試步驟流程如圖2所示。
2.7 測(cè)試數(shù)據(jù)分析
由于傾角傳感器測(cè)試是在野外環(huán)境中,因此要考慮環(huán)境的溫度變化。本文將野外環(huán)境溫度變化曲線模擬為正弦曲線,如公式(1):

式中,t——時(shí)間,該值是測(cè)試時(shí)間點(diǎn);
k——一天的最高溫度和最低溫度的差值,該值在本文中取值為24 ℃;
T——時(shí)間周期,在文中取值為24 h。
測(cè)試是在白天進(jìn)行,溫度變化速率較快,因此對(duì)f(t)進(jìn)行求導(dǎo)。將測(cè)試中獲取到的值代入求導(dǎo)式中,可得到溫度最快的變化速率,即0.1 ℃/min。
2.7.1 啟動(dòng)特性測(cè)試
將安裝好傾角傳感器的設(shè)備置于測(cè)試場(chǎng)地,傳感器測(cè)量部位置于水平狀態(tài),此時(shí)傳感器處于斷電操作。兩小時(shí)后進(jìn)行傳感器上電操作,記錄上電后1小時(shí)之內(nèi)的數(shù)據(jù),傾角傳感器A數(shù)據(jù)曲線如圖3所示,傾角傳感器B數(shù)據(jù)曲線如圖4所示。
從圖3中可以看出:傾角傳感器A在上電1分鐘內(nèi)角度測(cè)量值為0.002°;上電1分鐘至5分鐘測(cè)量值在0.001°~0.002°之間上下浮動(dòng)且變化頻率較快,測(cè)量誤差值為0.001°;上電5分鐘至14分鐘測(cè)量值在0.001°~0.002°之間上下浮動(dòng),而此時(shí)波動(dòng)頻率較低,測(cè)量誤差值為0.001°;上電14分鐘之后測(cè)量值穩(wěn)定。由上述可知,測(cè)試選取傾角傳感器在上電啟動(dòng)1分鐘后逐步穩(wěn)定。
圖4中可以看出:傾角傳感器B在上電啟動(dòng)15分鐘后角度測(cè)量值為-0.048°,輸出測(cè)量值達(dá)到穩(wěn)定,測(cè)量誤差值為0.001°;上電啟動(dòng)4分鐘至15分鐘之間測(cè)量值為-0.048°,測(cè)量誤差值為0.002°;上電啟動(dòng)1分30秒至4分鐘之間測(cè)量值為-0.049°,測(cè)量誤差值為0.001°;上電啟動(dòng)1分30秒內(nèi)測(cè)量值為-0.048°;上電啟動(dòng)1分30秒至15分鐘之間測(cè)量誤差值為0.002°,之后達(dá)到穩(wěn)定。
圖3和圖4比較可以得出:在上電啟動(dòng)時(shí),傾角傳感器A比傾角傳感器B更快地達(dá)到穩(wěn)定狀態(tài);在達(dá)到穩(wěn)定后一段時(shí)間內(nèi),傾角傳感器A比傾角傳感器B的測(cè)量誤差要小。
2.7.2 動(dòng)態(tài)特性測(cè)試
傾角傳感器上電啟動(dòng),待輸出測(cè)量值穩(wěn)定后,起豎傾角傳感器安裝部位。獲取到傾角傳感器起豎時(shí)的輸出數(shù)據(jù),將獲取到的傳感器輸出測(cè)量值數(shù)據(jù)生成曲線。另外,從傳感器安裝設(shè)備中獲取到設(shè)備起豎時(shí)的參數(shù),生成起豎設(shè)備動(dòng)作曲線。將兩條曲線作差即可得到傳感器測(cè)量值的滯后角度數(shù)據(jù),傾角傳感器A滯后曲線如圖5所示,傾角傳感器B滯后曲線如圖6所示。
圖5中可以看到:設(shè)備在35 s前處于水平狀態(tài),在35 ~43 s之間進(jìn)行起豎動(dòng)作,在43 s之后傳感器再次進(jìn)入穩(wěn)定狀態(tài)。在35 s處,設(shè)備從靜止?fàn)顟B(tài)變?yōu)閯?dòng)態(tài),滯后曲線向下凸起,傳感器測(cè)量值緊隨設(shè)備而動(dòng),動(dòng)態(tài)跟隨性較好。之后,傳感器滯后性逐步加大,在41 ~42 s之間滯后達(dá)到最大值4.5°。最后,角度滯后值變小,逐漸為零。
圖6中可以看到:傾角傳感器B的起豎過(guò)程與傳感器A相同,而在35 s處設(shè)備起豎時(shí),傳感器測(cè)量值并沒(méi)有緊隨傳感器而動(dòng),在設(shè)備起豎一定角度之后,傳感器測(cè)量值才會(huì)改變輸出,在41~42 s之間,滯后達(dá)到最大值3°。最后,角度滯后值變小,逐漸為零。
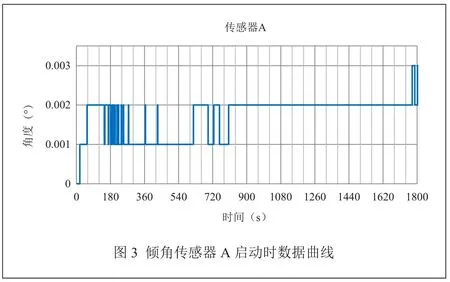
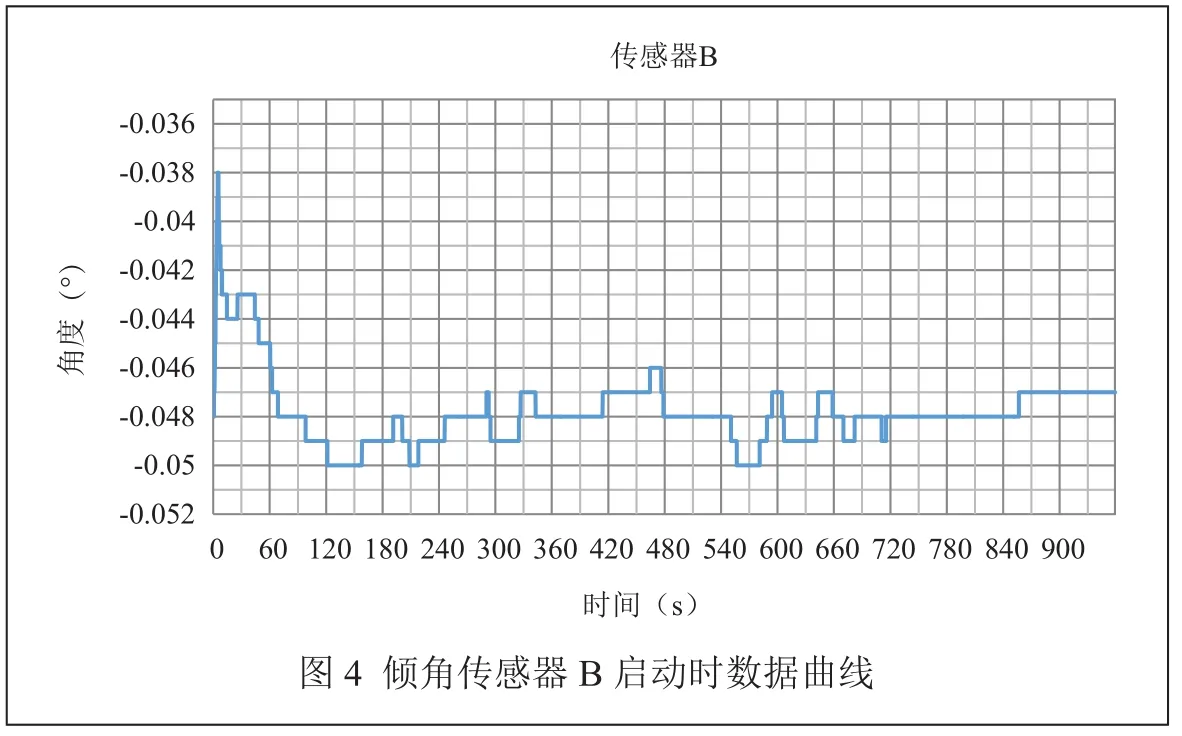
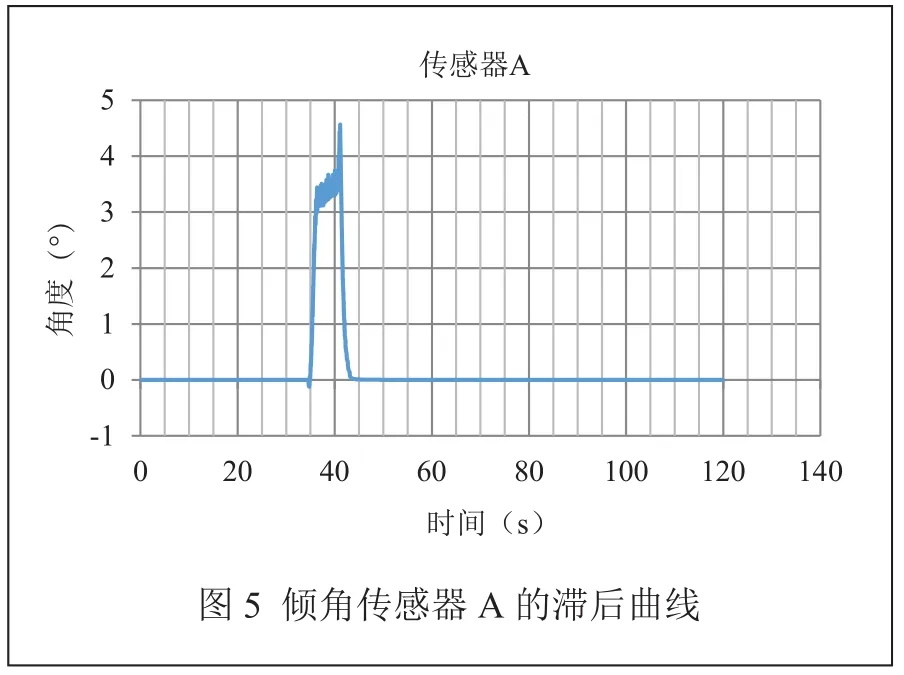

圖5和圖6比較可以得出:傳感器A比傳感器B的動(dòng)態(tài)跟隨性好,而在傳感器與設(shè)備的滯后達(dá)到一定程度時(shí),傳感器B會(huì)使用新的數(shù)據(jù)處理方法,從而使得傳感器B的跟隨性變好。
2.7.3 穩(wěn)態(tài)特性測(cè)試
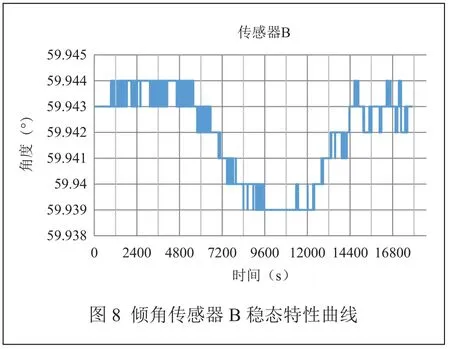
在設(shè)備從水平狀態(tài)起豎至60°后,等待傾角傳感器輸出測(cè)量數(shù)據(jù)至穩(wěn)定,持續(xù)監(jiān)測(cè)和收集傳感器輸出數(shù)據(jù),5~6小時(shí)后結(jié)束測(cè)試,處理傳感器穩(wěn)態(tài)時(shí)的數(shù)據(jù)生成曲線,傾角傳感器A穩(wěn)態(tài)曲線如圖7所示,傾角傳感器B穩(wěn)態(tài)曲線如圖8所示。
圖7可以得到:傳感器A在開(kāi)始的1小時(shí)30分內(nèi)輸出測(cè)量值較為穩(wěn)定。在1小時(shí)30分后測(cè)量值開(kāi)始向大處偏移,在2小時(shí)20分處達(dá)到最大值,之后偏移量變小。在4小時(shí)處再次回到初始時(shí)的穩(wěn)定狀態(tài)。傳感器A在溫度變化較為劇烈時(shí)測(cè)量值最大偏移量為0.007°。
圖8可以得到:傳感器B在開(kāi)始的1小時(shí)40分內(nèi)輸出測(cè)量值較為穩(wěn)定。在1小時(shí)40分后測(cè)量值開(kāi)始向小處偏移,在2小時(shí)30分處達(dá)到最大值,之后偏移值變小。在4小時(shí)處再次回到初始時(shí)的穩(wěn)定狀態(tài)。傳感器B在溫度變化較為劇烈時(shí)測(cè)量值最大偏移量為0.005°。
圖7和圖8比較可以得出:在相同的溫度變化速率下,傾角傳感器A比傾角傳感器B測(cè)量值偏移量較大,傾角傳感器A測(cè)量誤差值比傾角傳感器B測(cè)量誤差值大0.001°。由此可知,傾角傳感器B的穩(wěn)態(tài)特性比傾角傳感器A的穩(wěn)態(tài)特性要好。
3 結(jié)論

本文就傾角傳感器的啟動(dòng)特性、動(dòng)態(tài)特性和穩(wěn)態(tài)特性進(jìn)行了測(cè)試,通過(guò)對(duì)測(cè)試數(shù)據(jù)對(duì)比分析得出,傾角傳感器A的啟動(dòng)特性和跟隨特性較好;傾角傳感器B的動(dòng)態(tài)跟隨時(shí)滯后較小,穩(wěn)態(tài)時(shí)、溫度劇烈變化時(shí)角度的偏移較小。本文提出的穩(wěn)定性測(cè)試分析方法為設(shè)備選取適合其使用環(huán)境的傾角傳感器具有實(shí)際意義。
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00
