軟體水果采摘機械手系統(tǒng)設計分析與試驗
2021-05-31 02:54:04華超褚凱梅陳昕朱銀龍
林業(yè)工程學報 2021年3期
華超,褚凱梅,陳昕,朱銀龍
(南京林業(yè)大學機械電子工程學院,南京 210037)
水果采摘是農(nóng)林生產(chǎn)過程中最重要的環(huán)節(jié),目前水果采摘主要依靠人工完成,存在效率低、成本高、勞動量大等問題[1],因此實現(xiàn)水果采摘的自動化變得越來越迫切[2]。目前,很多農(nóng)林采摘機器人都實現(xiàn)了智能化,大大提高了采摘效率[3],但大部分末端執(zhí)行器都使用傳統(tǒng)的剛性機械手,一般存在結(jié)構(gòu)復雜、靈活性差、與環(huán)境交互性低等問題,極易在抓取過程中損壞抓取產(chǎn)品,難以實現(xiàn)無損采摘[4-5]。
軟體機械手的出現(xiàn)為水果采摘提供了新的思路和方法。Hao等[6]基于氣壓驅(qū)動設計了一種軟體手爪,可以根據(jù)所抓取物體的形狀改變自身的長度,達到穩(wěn)定抓取的效果。Wehner等[7]采用硅橡膠材料,制作了一種基于氣動網(wǎng)絡的執(zhí)行器,具有變形大、柔順性好、交互性好的特點。She等[8]設計了一種內(nèi)嵌驅(qū)動和傳感器的軟體手爪,可以實時反映手爪的工作狀態(tài),具有活動靈活、交互性好等特點。Brown等[9]設計了一種新型基于顆粒堵塞的軟體機器人,由軟材料和顆粒狀咖啡豆組成,通過施加負壓,可實現(xiàn)對整體結(jié)構(gòu)剛度的調(diào)整,在抓取物體時可以自適應物體的形狀,并且可以通過提高剛度,提高抗干擾能力。
軟體機械手的出現(xiàn)解決了傳統(tǒng)剛性機械手結(jié)構(gòu)復雜、交互差等問題,由于材料的柔順性,減小了對抓取物體的損傷,并且能夠自動適應抓取物體的形狀大小,通過變剛度結(jié)構(gòu)提高抗干擾能力。可以看出軟體機械手適用于對水果的無損抓取,具有廣闊的應用前景[10-11]。本研究利用仿真分析得出最優(yōu)的結(jié)構(gòu)參數(shù)設計軟體機械手樣機,通過試驗研究末端力的輸出大小以及抓取的效果,設計的軟體機械手能夠?qū)崿F(xiàn)對水果產(chǎn)品的無損抓取,在一定程度上解決了剛性機械手柔順性差、交互性差等問題。
1 軟體采摘機械手的設計與制作
1.1 軟體采摘機械手的結(jié)構(gòu)設計
軟體機械手通常利用局部應變差產(chǎn)生彎曲自由度,即在同一氣壓驅(qū)動下,不同剛度材料層產(chǎn)生的應變不同,層間會產(chǎn)生不均勻的位移,在材料自身應力的作用下,軟體機械手會向應變較小的材料層彎曲[12]。
基于上述原理,軟體采摘機械手由4個驅(qū)動手指和法蘭盤組成,如圖1所示。每個驅(qū)動手指由應變層和限制層構(gòu)成,應變層是由硅膠材料制成的多氣囊結(jié)構(gòu),各個氣囊間通過腔道連接,限制層是一層壁厚均勻的硅膠。利用硅膠黏合劑將限制層和應變層粘合起來,使驅(qū)動手指成為一個空腔結(jié)構(gòu)。法蘭盤和驅(qū)動手指通過螺栓連接,其中裝配法蘭盤的中心孔用于與機械臂連接。充氣時,應變層的氣囊結(jié)構(gòu)應變較大,受限制層的約束,驅(qū)動手指向內(nèi)彎曲;抽氣時,應變層的收縮率大于限制層的收縮率,驅(qū)動手指向外彎曲;當排盡腔體內(nèi)的氣體,由于材料的柔順性,驅(qū)動手指恢復原形。
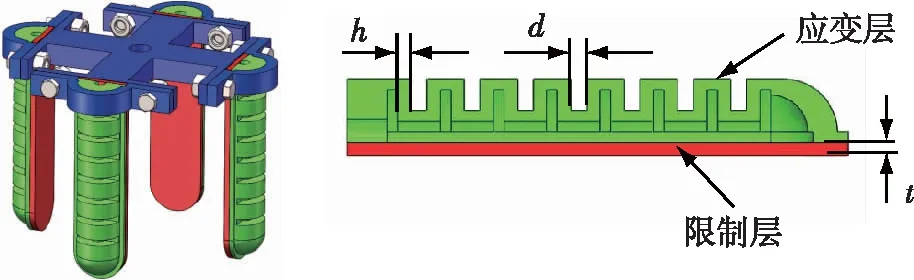
圖1 軟體采摘機械手的結(jié)構(gòu)示意圖Fig. 1 Structure diagram of software picking manipulator
1.2 軟體驅(qū)動手指的制備
本研究采用3D打印技術(shù)對模具進行制作,模具由應變層模具和限制層模具兩部分組成,如圖2所示,制備過程如下:
1)硅膠選用Smooth-ON公司生產(chǎn)的Dragon Skin 20材料,將硅膠A、B兩組按1∶1的比例混合,分別取20 g,利用攪拌機攪拌均勻。
2)將配制好的硅膠材料均勻倒入模具中,并用端蓋進行密封,為了避免氣泡的產(chǎn)生,在應變層端蓋模具上預留幾個孔,用來排除多余的硅膠。
3)靜置5 h后,將端蓋模具從底部模具中拔出,得到應變層和限制層,通過硅膠將兩部分黏合在一起,待其完全黏合,即可得到驅(qū)動手指實體。
4)為了保證氣路的密封性,便于氣管的插入,在通氣孔插入快插接頭,利用硅膠黏合劑將接口密封。
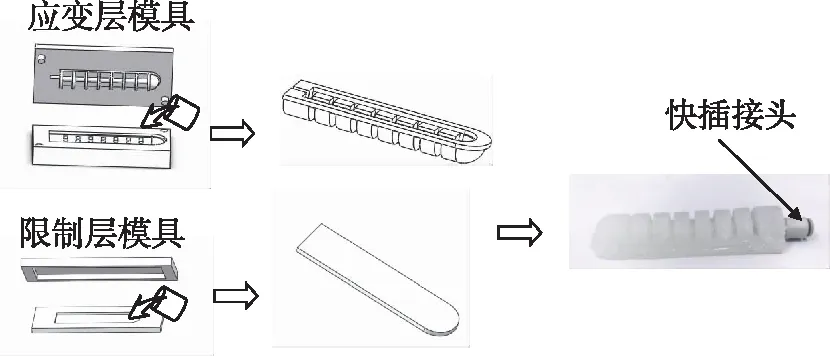
圖2 驅(qū)動手指制備流程圖Fig. 2 Driving finger preparation flow chart
2 軟體采摘機械手有限元分析
設計的驅(qū)動手指結(jié)構(gòu)參數(shù)如圖1所示,主要有腔體厚度h、氣囊個數(shù)k、氣囊間隙d以及限制層厚度t,為了分析結(jié)構(gòu)參數(shù)對驅(qū)動手指彎曲性能的影響,采用ABAQUS對其進行有限元仿真分析,得到最優(yōu)的結(jié)構(gòu)參數(shù)。驅(qū)動手指的彎曲變形屬于非線性大變形,Yeoh模型能夠表述其材料的特征[13],其應變能密度函數(shù)表示為:
(1)
式中:Ci0和Di為待定系數(shù);I1為變形張量;J為彈性體積比,硅膠視為不可壓縮材料時,J=1。
通常使用二項參數(shù)形式的應變能密度函數(shù)[14],Yeoh模型典型的二項參數(shù)形式為:
W=C10(I1-3)+C20(I1-3)2
(2)

(3)
聯(lián)立式(2)和式(3),可得主應力σ1和主伸長比λ1之間的關(guān)系:

(4)
通過拉伸實驗得到應力與應變的擬合曲線,如圖3所示,經(jīng)過ABAQUS處理分析得到其材料參數(shù)C10=0.11,C20=0.02。
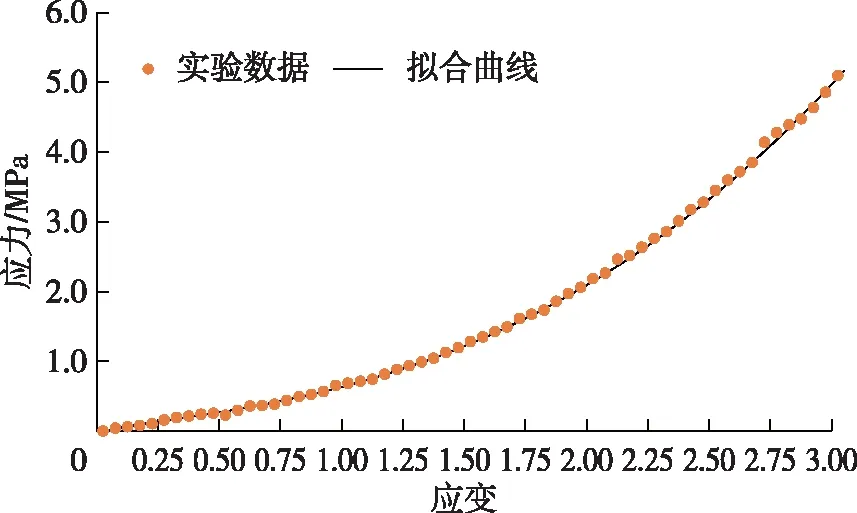
圖3 拉伸實驗應力與應變的關(guān)系Fig. 3 Relationship between stress and strain in tensile test
仿真過程中,采用流體腔模型來實現(xiàn)充氣模擬,并將充氣端所在平面完全約束。由于屬于大變形,分析步中需打開幾何非線性開關(guān)。在網(wǎng)格單元類型設置中,選擇四面體網(wǎng)格,幾何階次為二次,考慮到硅膠材料不可壓縮,故采用雜交單元類型,網(wǎng)格劃分如圖4所示。
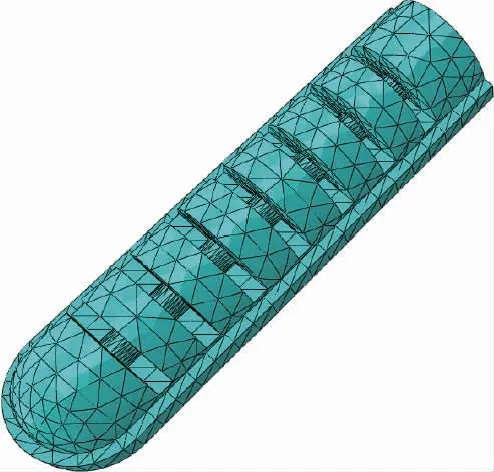
圖4 驅(qū)動手指網(wǎng)格劃分圖Fig. 4 Grid division diagram of drivefinger
2.1 腔體壁厚對驅(qū)動手指彎曲性能的影響
分別對腔體壁厚為1.5,2.0,2.5以及3.0 mm的驅(qū)動手指仿真分析,其中氣囊個數(shù)為8個,氣囊間的間隙為3 mm,限制層厚度為2.5 mm。
不同腔體壁厚對彎曲特性影響的仿真結(jié)果見圖5a。在相同氣壓下,腔體壁厚越大,彎曲角度越小,且隨著氣壓的增大,彎曲角度增大的趨勢逐漸放緩。壁厚為1.5 mm驅(qū)動手指在氣壓為40 kPa時的仿真圖見圖5b,由于壁厚太薄,無法約束驅(qū)動手指的徑向膨脹,在限制層和應變層的連接處應力較大,極易損壞驅(qū)動手指;當壁厚3 mm時,材料自身的應力會大大限制其彎曲變形,故腔體的壁厚不宜太大。當壁厚2.5 mm時,既能滿足彎曲角度的要求,且彎曲趨勢較為平緩,驅(qū)動手指不易損壞。
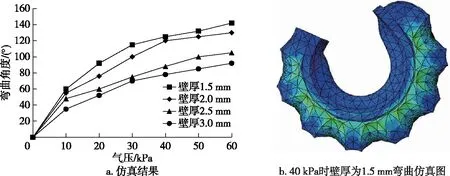
圖5 腔體壁厚對驅(qū)動手指彎曲特性的影響Fig. 5 Influence of cavity wall thickness on bending characteristics
2.2 氣囊個數(shù)對驅(qū)動手指彎曲特性的影響
分別對氣囊個數(shù)為8,10和12個的驅(qū)動手指進行仿真分析,其中腔體壁厚為2.5 mm,氣囊間隙為3 mm,其厚度為2.5 mm。
氣囊個數(shù)對驅(qū)動手指彎曲特性影響的仿真結(jié)果見圖6,可見氣囊個數(shù)對驅(qū)動手指彎曲特性影響不大,軟體機械手實際使用時可根據(jù)被抓取物體的大小,選擇合適的氣囊個數(shù),改變驅(qū)動手指的長度,達到對物體的穩(wěn)定抓取。
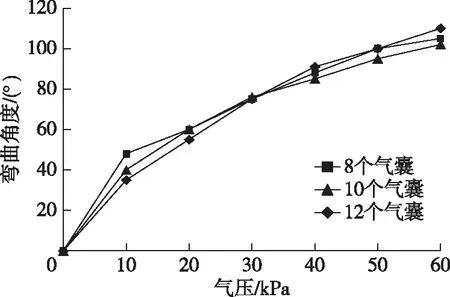
圖6 氣囊個數(shù)對驅(qū)動手指彎曲特性的影響Fig. 6 Influence of the number of air bags on the bending characteristics
2.3 氣囊間隙對驅(qū)動手指彎曲特性的影響
分別對氣囊間隙為1,3和5 mm的驅(qū)動手指進行仿真分析,其中腔體壁厚為2.5 mm,氣囊個數(shù)為8個,限制層厚度為2.5 mm。
氣囊間隙對驅(qū)動手指彎曲特性影響的仿真結(jié)果見圖7。當間隙為1 mm時,氣壓高于30 kPa時,由于氣囊間隙較小,相鄰氣囊間變形發(fā)生干擾,且限制層的變形較大,導致彎曲角度變化較小;當間隙為5 mm,氣壓在20~50 kPa時,彎曲角度基本不變,氣壓大于50 kPa后,由氣囊間隙太大,應變層無法限制其徑向膨脹,導致驅(qū)動手指失效。故本研究采用間隙為3 mm的驅(qū)動手指結(jié)構(gòu)。
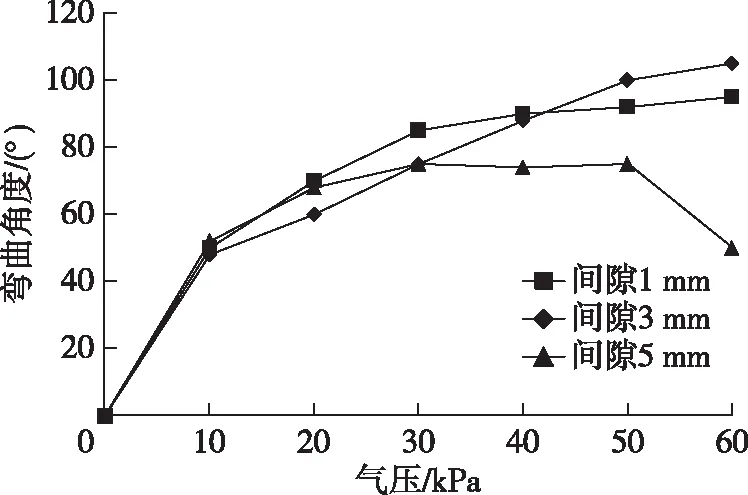
圖7 氣囊間隙對驅(qū)動手指彎曲特性的影響Fig. 7 Influence of airbag clearance on bending characteristics
2.4 限制層厚度對驅(qū)動手指彎曲特性的影響
分別對限制層厚度為1.5,2.0,2.5和3.0 mm的驅(qū)動手指進行仿真分析。其中腔體壁厚為2.5 mm,氣囊個數(shù)為8個,氣囊間隙為3 mm。
限制層厚度對驅(qū)動手指彎曲特性的影響見圖8。同一氣壓上,限制層壁厚越大,彎曲角度越小。當限制層厚度為1.5 mm,氣壓超過50 kPa時,由于限制層厚度太薄,限制層一側(cè)變形較大,徑向膨脹無法限制,最終導致驅(qū)動手指失效,彎曲角度不再變化。
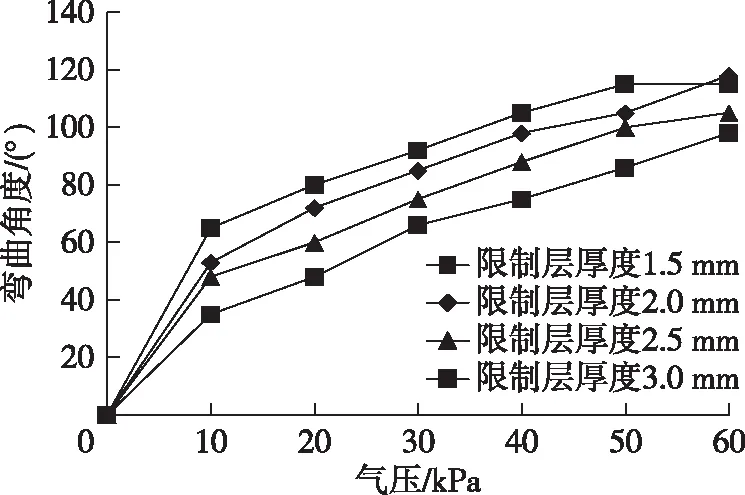
圖8 限制層厚度對驅(qū)動手指彎曲特性影響Fig. 8 Influence of limiting layer thickness on bending characteristics
通過上述對驅(qū)動手指各參數(shù)的有限元分析,其結(jié)構(gòu)參數(shù)既要滿足驅(qū)動手指能夠達到一定彎曲角度,也要避免由于徑向膨脹等原因造成驅(qū)動手指失效,故得到最優(yōu)的結(jié)構(gòu)參數(shù)為:腔體壁厚為2.5 mm,氣囊個數(shù)為8個,氣囊間隙為3 mm,限制層厚度為2.5 mm。
3 軟體采摘機械手試驗分析
3.1 軟體采摘機械手彎曲特性試驗
軟體采摘機械手試驗平臺如圖9所示,利用Stm32單片機與Labview通訊,實時獲取比例閥的輸出氣壓大小。繼電器模塊控制電磁閥的通斷,控制氣體的流向;DAC模塊進行數(shù)/模轉(zhuǎn)換控制輸出模擬電壓的大小,決定比例閥的開合大小,調(diào)節(jié)氣壓的大小。
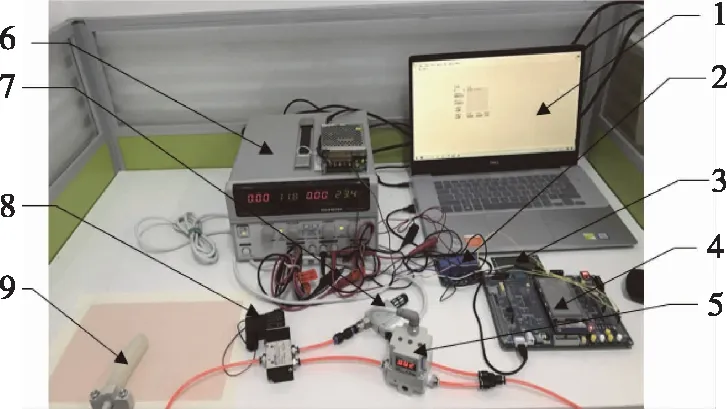
1. Labview上位機;2. 繼電器模塊;3. 三極管放大電路;4. Stm32單片機;5. 比例閥;6. 直流電源;7. 真空發(fā)生器;8. 電磁閥;9. 驅(qū)動手指。圖9 試驗現(xiàn)場Fig. 9 Experimental site
當真空發(fā)生器工作時,驅(qū)動手指內(nèi)部產(chǎn)生負壓,向外側(cè)彎曲;當比例閥工作時,驅(qū)動手指根據(jù)輸入氣壓的大小,向內(nèi)彎曲相應的角度。為了驗證仿真結(jié)果的準確性,利用比例閥控制輸入氣壓的大小,在網(wǎng)格上繪制出不同氣壓下驅(qū)動手指的彎曲圖,如圖10a所示。
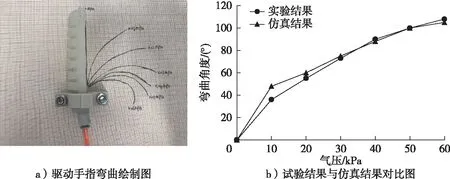
圖10 軟體采摘機械手彎曲特性試驗Fig. 10 Bending characteristic test of soft picking manipulator
試驗結(jié)果與仿真結(jié)果的對比曲線見圖10b。可以得到有限元仿真結(jié)果與試驗結(jié)果基本吻合,能夠準確反映驅(qū)動手指的彎曲特性,但當氣壓為10 kPa時,誤差較大,分析原因可能是:1)剛開始充氣時,氣壓輸出不太穩(wěn)定,驅(qū)動手指無法保持在穩(wěn)定狀態(tài)導致的測量誤差;2)有限元仿真中本構(gòu)模型的材料參數(shù)與實際參數(shù)存在一定誤差。
3.2 軟體采摘機械手末端輸出力試驗
軟體采摘機械手末端輸出力的大小決定著其負載能力,設計了如圖11所示的試驗裝置對其進行測量。

圖11 驅(qū)動手指末端輸出力試驗Fig. 11 Output force experiment at the end of driving finger
利用推拉力計分別在彎曲角度為0°,15°,30°,45°,60°,75°和90°對不同氣壓作用下的驅(qū)動手指輸出力進行測量。由于驅(qū)動手指的末端輸出力與抓取物體表面垂直,應保證推拉力計與末端所在平面垂直。試驗結(jié)果如表1所示,在驅(qū)動手指彎曲過程中,末端輸出力隨著彎曲角度的增大而減小,當彎曲到最大角度時,末端輸出力為0;并且在相同彎曲角度下,充氣壓力越大,末端輸出力越大。
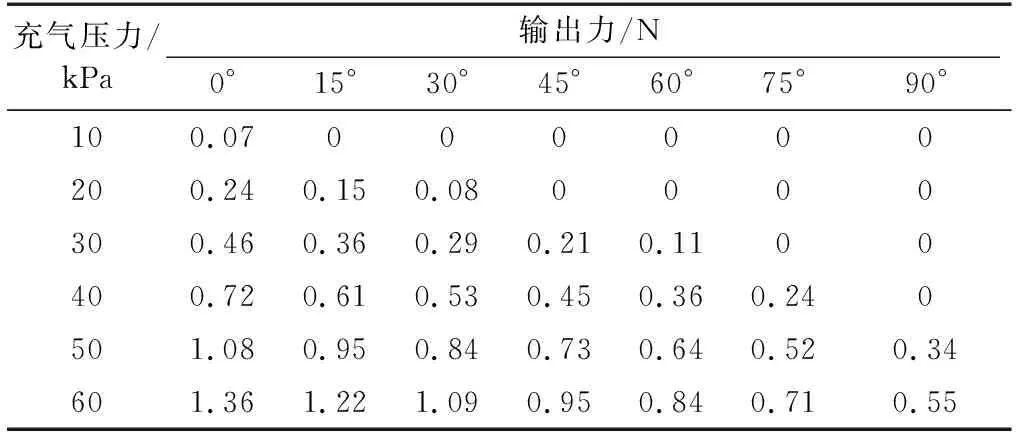
表1 驅(qū)動手指末端輸出力Table 1 Output force at the end of the drive finger
可見當軟體采摘機械手抓取物體時,應該根據(jù)抓取物體的大小和抓取力的大小來選擇適當?shù)臍鈮骸?/p>
3.3 軟體采摘機械手抓取試驗
利用如圖12所示的機械臂與軟體采摘機械手連接,方便進行抓取試驗。當抓取較大物體時,可先采用真空發(fā)生器產(chǎn)生負壓,使各個驅(qū)動手指向外側(cè)彎曲(圖12a),以適應抓取物體的大小,待機械臂到達抓取位置時,切換比例閥工作,使驅(qū)動手指向內(nèi)彎曲,抓取物體。抓取可分為包絡抓取和指尖抓取[15],針對這兩種抓取方式進行分析。
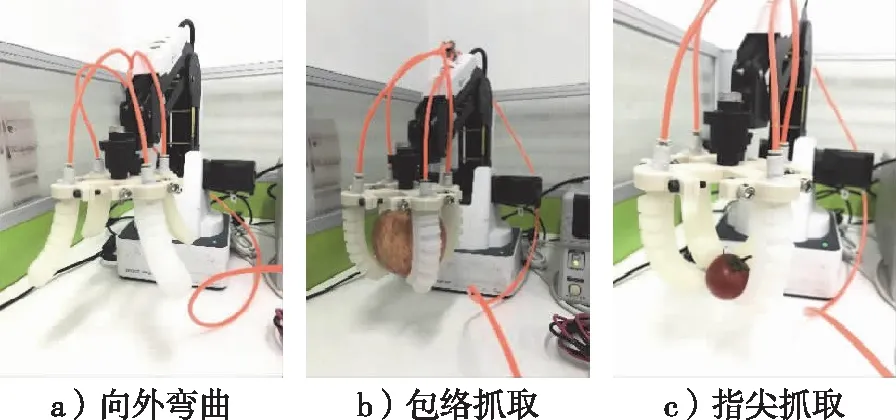
圖12 軟體采摘機械手抓取實驗Fig. 12 Soft picking manipulator grasping experiment
首先對包絡抓取進行分析。由于包絡抓取是將整個物體包裹住,與物體接觸面積大,通過彎矩產(chǎn)生較大的抓取力,適用于體積較大的物體,故選用蘋果、梨、西紅柿和芒果進行抓取,如圖12b所示。可以看出軟體采摘機械手可以很好地貼合物體表面,實現(xiàn)穩(wěn)定抓取,且抓取物表面無損壞。
各水果的質(zhì)量及驅(qū)動氣壓如表2所示。隨著抓取物體質(zhì)量的增加,所需的驅(qū)動氣壓也增大。當抓取芒果時,驅(qū)動氣壓達到最大,可見軟體采摘機械手包絡抓取的最大負載約為5.8 N。

表2 抓取物體質(zhì)量及驅(qū)動氣壓Table 2 Grasping object mass and driving air pressure
然后對指尖抓取進行分析。指尖抓取是通過驅(qū)動手指的指尖與物體接觸,接觸面積較小,末端輸出力無法提供較大的抓取力,主要針對體積較小的物體,故選用圣女果作為抓取對象,質(zhì)量為15.3 g,在驅(qū)動氣壓為10 kPa時,即可實現(xiàn)抓取,如圖12c所示。指尖抓取雖然可以實現(xiàn)對體積較小物體的無損抓取,但抓取的穩(wěn)定性不足,容易造成抓取物體的脫落。造成這種現(xiàn)象的主要原因是驅(qū)動手指剛度太小,可以通過減小其長度或者添加變剛度結(jié)構(gòu)來提高剛度。
對比上述兩種抓取方式,包絡抓取自動適應物體的形狀和大小,能夠?qū)崿F(xiàn)對體積較大物體的抓取;指尖抓取可以對體積較小的物體進行抓取,但抓取的抗干擾能力較弱,通過適當提高其剛度以達到穩(wěn)定抓取。可以根據(jù)不同的工作環(huán)境和抓取對象選擇合適的抓取類型,對水果進行無損抓取。
4 結(jié) 論
基于軟體機器人的工作原理,提出了一種用于水果無損抓取的軟體采摘機械手,利用3D打印技術(shù)制作的模具,制備出驅(qū)動手指,并通過法蘭盤將4個驅(qū)動手指裝配成軟體采摘機械手。為了分析驅(qū)動手指的結(jié)構(gòu)參數(shù)對彎曲特性的影響,采用ABAQUS有限元分析對各個結(jié)構(gòu)參數(shù)進行分析,優(yōu)化了驅(qū)動手指的結(jié)構(gòu)參數(shù)。搭建試驗平臺,在0~60 kPa驅(qū)動氣壓作用下,通過彎曲特性試驗驗證了有限元仿真的準確性,通過末端輸出力試驗得到彎曲角度與末端輸出力的關(guān)系,最后對包絡抓取和指尖抓取兩種抓取方式進行對比分析,得出軟體采摘機械手的最大輸出力大約為5.8 N。