基于VPX架構(gòu)的無人機測控終端綜合化開放平臺技術(shù)*
2021-05-31 03:04:00陳會林教富龍2袁泮江洪志勇
電訊技術(shù) 2021年5期
陳會林**1,教富龍2,袁泮江,洪志勇,王 羽
(1.中國西南電子技術(shù)研究所,成都610036;2.北京跟蹤與通信技術(shù)研究所,北京100083;3.西安衛(wèi)星測控中心天津測控站,天津301900)
0 引 言
隨著無人機系統(tǒng)技術(shù)的蓬勃發(fā)展,無人機系統(tǒng)在各大作戰(zhàn)場景中的普及與應(yīng)用也越來越廣泛。各國之間、各軍種之間、各種無人機系統(tǒng)的協(xié)同作戰(zhàn)問題日益凸顯,尤其在多國聯(lián)合作戰(zhàn)情況下,在未來多域作戰(zhàn)場景和環(huán)境下[1],無人機系統(tǒng)將發(fā)揮越來越重要的作用。
針對上述問題,研制能夠在多個平臺之間實現(xiàn)協(xié)同、能操作各個軍種的多種無人機系統(tǒng)的通用控制系統(tǒng)及測控終端的需求日益迫切,世界軍事強國均開展了相關(guān)技術(shù)及解決方案研究。近期世界各國無人機系統(tǒng)互操作性的研發(fā)是與新型無人機系統(tǒng)、C4I(Command,Control,Communication,Computer and Intelligence)系統(tǒng)以及聯(lián)合作戰(zhàn)等項目和計劃同步推進的。近年來無人機系統(tǒng)發(fā)展較快的國家和組織(如以美國為首的北約)已經(jīng)形成了一系列解決互操作性問題的典型標(biāo)準(zhǔn)、概念以及相關(guān)開放式體系架構(gòu)解決方案[2]。
為打破無人機互操作性的限制,北約率先制定了STANAG 4586標(biāo)準(zhǔn),以提高無人機系統(tǒng)在盟軍聯(lián)合作戰(zhàn)環(huán)境下的互操作能力。該標(biāo)準(zhǔn)定義了適應(yīng)作戰(zhàn)需求的互操作等級(Level of Interoperatability,LOI)以及無人機地面控制系統(tǒng)的體系結(jié)構(gòu)、接口、通信協(xié)議、數(shù)據(jù)源和消息格式,同時還明確了要求采用的其他北約標(biāo)準(zhǔn),如成像系統(tǒng)可互操作數(shù)據(jù)鏈標(biāo)準(zhǔn)(STANAG 7085)以及與機上有效載荷有關(guān)的數(shù)字傳感器數(shù)據(jù)標(biāo)準(zhǔn)(STANAG 7023,4545,4607,4609)等。
美國波音公司和英西圖公司的“掃描鷹”開發(fā)小組近年來已使其無人機系統(tǒng)與北約無人機的STANAG 4586相兼容[3]。與STANAG 4586兼容能使北約成員國使用各自的無人機系統(tǒng)和地面控制站設(shè)備聯(lián)合支持軍事作戰(zhàn)行動。這極大增強了成員國無人機之間的互操作性,并可通過一種通用地面接口實時共享各國無人機系統(tǒng)處理的數(shù)據(jù)和信息。
為了建立一個無人系統(tǒng)開放體系,由美國國防部長辦公室、陸軍、海軍、空軍、通信衛(wèi)星工作組等多個部門提供支持,制定了聯(lián)合無人系統(tǒng)體系結(jié)構(gòu)(Joint Architecture for Unmanned Systems,JAUS)系列標(biāo)準(zhǔn)。該系列標(biāo)準(zhǔn)適用于無人機、無人地面車輛、無人潛航器、無人水面艇等無人系統(tǒng)。
JAUS標(biāo)準(zhǔn)定義了一種模塊化、松耦合、可擴展的體系結(jié)構(gòu),以及一組與具體應(yīng)用無關(guān)、可重用的構(gòu)件和服務(wù),同時規(guī)定了進行內(nèi)部和外部通信的標(biāo)準(zhǔn)接口消息,從而使符合JAUS標(biāo)準(zhǔn)的無人系統(tǒng)具備互操作能力。
在國內(nèi),無人機測控系統(tǒng)基本上都是基于專用定制化的硬件平臺和軟件模塊,缺乏互通互操作能力。只有極少數(shù)類型的無人機能夠采用通用化地面站[4],但是尚未建立相關(guān)的行業(yè)標(biāo)準(zhǔn)及規(guī)范,特別是在機載終端等設(shè)備上沒有太多的進展。
目前無人系統(tǒng)的通用化主要基于標(biāo)準(zhǔn)的互操作能力。然而,為了實現(xiàn)一種真正的即插即用級互操作能力(即把來自多個銷售商的軟件能力集成到一個系統(tǒng),支持對來自其他系統(tǒng)的數(shù)據(jù)進行交換、解釋和利用),就需要實現(xiàn)一種開放式體系架構(gòu)[5]。
開放式體系架構(gòu)是指一種具有模塊化、可互操作、接口公開發(fā)布和遵從開放式標(biāo)準(zhǔn)的系統(tǒng)架構(gòu)。開放式體系架構(gòu)具有可擴展、可升級以及與其他系統(tǒng)的互操作等特點,可以降低研發(fā)成本,解決新技術(shù)有效插入問題以及保障系統(tǒng)升級擴展等。開放式體系架構(gòu)涉及標(biāo)準(zhǔn)、接口、模塊化設(shè)計等。
1 系統(tǒng)總體設(shè)計
該平臺由多通道信道、信號處理模塊、管理控制及接口模塊等硬件模塊組成,物理形態(tài)相同的硬件模塊之間通過具有開放性、可擴展特征的“Switch Fabric”交換網(wǎng)絡(luò)互聯(lián),形成“資源池”;采用軟件通信體系結(jié)構(gòu)(Software Communication Architecture,SCA)波形封裝[6]技術(shù)完成對主鏈路海態(tài)鏈路功能、陸態(tài)鏈路功能、副鏈路功能及后續(xù)擴展新體制鏈路功能的波形開發(fā);通過“藍(lán)圖”技術(shù)完成波形的部署和加載,實現(xiàn)系統(tǒng)功能。產(chǎn)品組成框圖如圖1所示。

圖1 產(chǎn)品組成框圖
機載天線收到地面站發(fā)送的上行信號后,在射頻前端中經(jīng)低噪聲放大器(Low Noise Amplifier,LNA)放大再下變頻至中頻,A/D變換后,經(jīng)解擴、解調(diào)處理,輸出的遙控信息送出到管理控制及接口模塊中的協(xié)議處理單元;由協(xié)議處理單元完成主副鏈路選通、解復(fù)接后,傳輸給保密機解密處理,然后將飛控指令、載荷管控指令送給飛控計算機、綜合任務(wù)管理計算機。
協(xié)議處理單元將飛控計算機、綜合任務(wù)管理計算機傳輸過來的飛控狀態(tài)、載荷設(shè)備狀態(tài),以及測控平臺本身的狀態(tài)信息,進行數(shù)據(jù)適配、分段操作、數(shù)據(jù)復(fù)接和成幀,形成遙測數(shù)據(jù)并送入副通道,副通道在對應(yīng)的時隙進行BPSK調(diào)制,形成已調(diào)下行中頻信號。對于主通道還要在遙測數(shù)據(jù)的基礎(chǔ)上復(fù)接載荷數(shù)據(jù)并成幀,送入主通道進行調(diào)制,形成已調(diào)下行中頻信號,分別在主副通道信道中進行上變頻,變頻到下行發(fā)射載波頻率,然后經(jīng)功率放大后通過天線向地面輻射。
綜合化平臺內(nèi)部采用DSP 完成平臺硬件模塊的初始化和驅(qū)動以及RapidIO總線控制[7],驅(qū)動程序包括控制管理驅(qū)動、RapidIO協(xié)議棧、文件系統(tǒng)和I/O子系統(tǒng)、RF 模塊驅(qū)動等;利用RapidIO總線和基于RapidIO總線的實時中間件實現(xiàn)模塊間芯片級高速互連,完成模塊間控制和數(shù)據(jù)信息的高速傳輸。
該系統(tǒng)針對平臺進行綜合化設(shè)計,采用開放式架構(gòu)和分頻段綜合設(shè)計思路,通過高度綜合化設(shè)計與集成,實現(xiàn)軟硬件分離,方便系統(tǒng)的擴展和升級。
硬件采用模塊化、標(biāo)準(zhǔn)化、通用化設(shè)計標(biāo)準(zhǔn),在信道模塊、管理控制接口和信號處理進行綜合設(shè)計,降低系統(tǒng)體積、重量、功耗,提升系統(tǒng)任務(wù)可靠性和維護保障水平。通過綜合化設(shè)計,系統(tǒng)可以完成陸態(tài)、海態(tài)、陸海態(tài)三種不同體制平臺的任意加載,具有主副2套獨立鏈路并能夠在統(tǒng)一管控下實現(xiàn)可靠切換的能力。
在物理層波形、高層協(xié)議以及工作流程的設(shè)計中,充分考慮抗干擾和低截獲能力的要求,采用基于感知輔助的抗干擾智能測控技術(shù),滿足軍用測控通信鏈復(fù)雜環(huán)境的基本需求。
2 系統(tǒng)體系架構(gòu)
從系統(tǒng)架構(gòu)開始,采用開放式可重構(gòu)的綜合化平臺架構(gòu)進行多通道測控通信系統(tǒng)的綜合化設(shè)計;通過標(biāo)準(zhǔn)、開放、可互操作的通用信號/信息處理平臺,采用軟件定義一切(Software Defined Anything,SDX)的設(shè)計理念,將不同體制通信功能進行封裝,使之成為符合SCA規(guī)范的軟件構(gòu)件并利用“藍(lán)圖”技術(shù)[8]完成,通過加載和重構(gòu)等方法完成對系統(tǒng)資源的配置,靈活構(gòu)建鏈路功能線程,實現(xiàn)功能的配置。
如圖2所示,綜合化開放平臺軟件按層次劃分共分為4層結(jié)構(gòu),分別是功能應(yīng)用層、系統(tǒng)平臺層、通信中間件層和平臺驅(qū)動層。

圖2 軟件體系結(jié)構(gòu)框圖
按軟件的功能劃分,可分為兩類,分別是“功能應(yīng)用軟件(功能應(yīng)用層軟件)” 和“系統(tǒng)平臺軟件(包括平臺驅(qū)動層、通信中間件層和系統(tǒng)平臺層軟件)”。
2.1 功能應(yīng)用層
功能應(yīng)用層實現(xiàn)系統(tǒng)設(shè)計功能項的算法軟件、信號處理軟件、數(shù)據(jù)處理軟件、功能控制軟件以及相應(yīng)功能線程的控制接口,包括視距鏈、超視距鏈、擴展鏈路等。所有功能軟件在各處理模塊的DSP、FPGA、CPU等處理器中完成。
2.2 系統(tǒng)平臺層
系統(tǒng)平臺層控制管理子層軟件的主要功能要求包括:
(1)內(nèi)外部接口控制代理與轉(zhuǎn)換——完成I/O模塊內(nèi)外部接口控制命令的執(zhí)行,以及接口協(xié)議的轉(zhuǎn)換和數(shù)據(jù)轉(zhuǎn)發(fā)。
(2)系統(tǒng)工作模式與事務(wù)管理——定義和維護系統(tǒng)各種運行階段的功能需求,完成需求滿足的過程控制。比如,各種功能線程需求;各種工作模式的切換,如多種上電初始化模式、任務(wù)運行模式、維護模式等工作模式下,定義系統(tǒng)的工作內(nèi)容和流程控制。
(3)系統(tǒng)工作狀態(tài)管理——定義和維護系統(tǒng)的邏輯工作狀態(tài)以及狀態(tài)遷移條件;根據(jù)系統(tǒng)健康管理的檢測結(jié)果,資源管理以及功能線程管理,確定系統(tǒng)當(dāng)前工作狀態(tài);與圖形化系統(tǒng)狀態(tài)監(jiān)控進行接口,能顯示出資源和功能線程等設(shè)備工作狀態(tài)。
(4)重構(gòu)策略管理——定義和維護各種系統(tǒng)狀態(tài)下系統(tǒng)的重構(gòu)策略,根據(jù)系統(tǒng)當(dāng)前狀態(tài)輸出系統(tǒng)軟硬件重構(gòu)方案。
(5)系統(tǒng)資源管理——與系統(tǒng)基礎(chǔ)服務(wù)框架子層提供的服務(wù)接口,通過基礎(chǔ)服務(wù)進行信息獲取、狀態(tài)維護和資源控制,如程序動態(tài)加載等控制管理。
(6)功能線程管理——功能線程的參數(shù)管理包括參數(shù)加載/更新等存儲管理、參數(shù)配置時序管理,構(gòu)建功能線程的過程控制包括正常功能構(gòu)建、應(yīng)急功能構(gòu)建、重構(gòu)功能構(gòu)建。
(7)系統(tǒng)健康管理——監(jiān)測系統(tǒng)硬件、平臺層軟件、功能線程以及系統(tǒng)層軟件的工作狀態(tài),定位系統(tǒng)故障并依據(jù)故障處理預(yù)案完成故障處理。
(8)ICD封裝與解析——I/O模塊內(nèi)外部接口數(shù)據(jù)信息的分選。
(9)系統(tǒng)藍(lán)圖及任務(wù)參數(shù)配置——依據(jù)任務(wù)計劃信息,在任務(wù)執(zhí)行前載入系統(tǒng)藍(lán)圖及任務(wù)參數(shù)并按子系統(tǒng)分解,下達到各子系統(tǒng)。
(10)插件管理——依據(jù)任務(wù)要求完成相應(yīng)功能應(yīng)用插件的查詢和加載。
(11)任務(wù)調(diào)度——依據(jù)任務(wù)計劃信息完成任務(wù)啟動、執(zhí)行、結(jié)束等調(diào)度操作,支持多任務(wù)調(diào)度。
(12)數(shù)據(jù)傳輸——通過天基網(wǎng)絡(luò)完成存儲平臺數(shù)據(jù)傳輸?shù)降孛嫣幚怼?/p>
(13)遙測信息處理——采編各模塊上報的狀態(tài)監(jiān)測信息及軟件運行狀態(tài)信息,完成遙測信息挑選、成幀和傳輸。
(14)遙控信息處理——接收實時遙控指令,完成遙控信息處理和執(zhí)行等。
系統(tǒng)平臺層基礎(chǔ)服務(wù)框架子層軟件的主要功能要求包括:
(1)建立軟硬件物理資源數(shù)據(jù)庫,維護硬件屬性、物理連接關(guān)系、軟件屬性、駐留位置、軟件組件間邏輯連接關(guān)系、與平臺控制服務(wù)接口,提供資源的邏輯層控制的機制和方法。
(2)系統(tǒng)資源管理的框架是相對固定的,能適應(yīng)功能模塊及其組件屬性、模塊端口類型、數(shù)目及連接關(guān)系的變化。
(3)系統(tǒng)資源管理涉及的硬件模塊間的物理端口連接關(guān)系,軟件組件間的邏輯連接關(guān)系能夠采用圖形化連線配置的方式進行表達。
2.3 通信中間件層
通信中間件層位于操作系統(tǒng)之上,應(yīng)用軟件(包括功能層軟件和系統(tǒng)層軟件)之下。向上通過中間件服務(wù)接口為應(yīng)用軟件提供通信服務(wù)、平臺資源管理服務(wù),以及在系統(tǒng)維護模式下提供可視化的系統(tǒng)監(jiān)控服務(wù)。向下通過硬件抽象適配層,與實現(xiàn)平臺硬件的操縱與控制的驅(qū)動層軟件接口,便于系統(tǒng)底層硬件的插入,實現(xiàn)系統(tǒng)軟件與系統(tǒng)硬件之間的松耦合設(shè)計。
系統(tǒng)通信中間件層軟件的具體工作內(nèi)容包括:
(1)網(wǎng)絡(luò)管理
網(wǎng)絡(luò)初始化:包括網(wǎng)絡(luò)的枚舉和發(fā)現(xiàn)。
平臺資源注冊:當(dāng)冷備份的功能模塊上電加入到網(wǎng)絡(luò)中運行時,需要把新資源信息注冊到網(wǎng)絡(luò)或平臺數(shù)據(jù)庫,同時也要更新到系統(tǒng)控制的資源管理數(shù)據(jù)庫。
路由配置:主要指通信鏈路的網(wǎng)絡(luò)路由選擇、網(wǎng)絡(luò)路由表的配置。
網(wǎng)絡(luò)健康監(jiān)測:為系統(tǒng)控制對平臺運行狀態(tài)的監(jiān)測提供基礎(chǔ)服務(wù),主要是網(wǎng)絡(luò)及網(wǎng)絡(luò)節(jié)點狀態(tài)信息的收集和上報。
網(wǎng)絡(luò)路由冗余:當(dāng)物理通信鏈路故障時,完成冗余備份的物理鏈路配置,把物理鏈路上綁定的邏輯鏈路自動平滑地切換到新的物理鏈路上來,也包括主備交換網(wǎng)絡(luò)的切換。
網(wǎng)絡(luò)故障隔離:屏蔽故障網(wǎng)絡(luò)端口。
配置預(yù)案解析:指網(wǎng)管軟件為位置無關(guān)網(wǎng)絡(luò)通信以及功能線程裝配提供名字服務(wù)。使用XML解析軟件,解析出功能線程裝配方案的配置信息,下發(fā)給其節(jié)點的模塊支持單元執(zhí)行具體的加載指令,并維護通信端口的邏輯名字與物理通信資源的關(guān)聯(lián)關(guān)系。
(2)網(wǎng)絡(luò)通信:指網(wǎng)絡(luò)的進程間通信(Inter-process Communication,IPC),實現(xiàn)位置無關(guān)的邏輯通信端口,完成通信機制的收發(fā)控制、通信鏈路的暫停和恢復(fù),以及物理通信接口在邏輯上的端口復(fù)用。
(3)XML解析軟件:根據(jù)DTD(Data Type Definition)文件類型定義,解析出XML文件的信息。
(4)硬件抽象適配:與實現(xiàn)平臺硬件的操縱與控制的驅(qū)動層軟件接口,便于系統(tǒng)底層硬件的插入,實現(xiàn)系統(tǒng)軟件與系統(tǒng)硬件之間的松耦合設(shè)計。
(5)中間件服務(wù)接口:為平臺的應(yīng)用程序提供通信服務(wù)、平臺資源管理服務(wù),以及可視化的系統(tǒng)監(jiān)控服務(wù)的服務(wù)接口。
(6)模塊支持單元(Module Support Unit,MSU)軟件包:分為兩種,其中一種只包含平臺層軟件對模塊通用功能的控制代理,如模塊BIT等;另一種還包含功能層軟件對模塊專用功能的控制代理,如信道濾波頻段的選擇等。
2.4 平臺驅(qū)動層
平臺驅(qū)動層為系統(tǒng)的基礎(chǔ)操作環(huán)境,包括商用操作系統(tǒng)、板級支持軟件包以及硬件接口的軟件驅(qū)動(Software,SW)。
3 系統(tǒng)控制管理技術(shù)
綜合化開放平臺系統(tǒng)的控制管理采用分級方式,平臺系統(tǒng)內(nèi)部設(shè)計了獨立的控制管理模塊,即系統(tǒng)控制模塊,負(fù)責(zé)內(nèi)部的資源管理和狀態(tài)維護,為系統(tǒng)控制和功能管理提供支持。為了實現(xiàn)上述目標(biāo),平臺系統(tǒng)包括資源管理(Resource Management)、配置管理(Configuration Management)、網(wǎng)絡(luò)管理(Network Management)、健康管理(Health Management)、時間管理(Time Management)等基礎(chǔ)服務(wù)功能,配合內(nèi)部的控制管理,同時為功能線程提供運行的環(huán)境,并通過定義的接口控制程序映像的運行。
這些控制管理功能共同形成了平臺系統(tǒng)功能線程和應(yīng)用程序的運行環(huán)境,為功能線程提供資源標(biāo)識和匹配、軟件加載、健康監(jiān)控以及全局時鐘等服務(wù)。
3.1 控制管理流程
控制管理流程按照控制管理的對象和工作的層次可以劃分為采用分層設(shè)計的方法把系統(tǒng)控制管理分成三層,即任務(wù)模式管理、功能線程管理和機箱資源管理,如圖3所示。

圖3 系統(tǒng)控制管理結(jié)構(gòu)
任務(wù)模式管理確定當(dāng)前的任務(wù)模式和功能需求,任務(wù)模式管理運行在后端綜合顯控中;功能線程管理運行在平臺系統(tǒng)中,其功能(APP)是按照當(dāng)前的工作模式和功能要求確定功能線程,控制功能線程的創(chuàng)建、啟動、停止和注銷,并統(tǒng)一管理平臺系統(tǒng)的工作狀態(tài);資源管理主要管理內(nèi)部的通用資源,包括處理器資源和網(wǎng)絡(luò)資源,負(fù)責(zé)軟件的加載,控制程序進程的工作狀態(tài)。
平臺系統(tǒng)資源管理設(shè)計采用“自頂向下”的方法,根據(jù)系統(tǒng)的復(fù)雜程度,選擇合理的控制管理結(jié)構(gòu),同時借鑒ASAAC標(biāo)準(zhǔn)定義。在本系統(tǒng)中,資源管理采取“集中管理、分層實施”的結(jié)構(gòu)。通過分層的管理,可以屏蔽一些復(fù)雜的邏輯控制,保持上下層資源管理的自動化和透明性。分層管理結(jié)構(gòu)的界面劃分清晰,便于系統(tǒng)開發(fā)和調(diào)試,層與層之間的相對獨立性也增加了系統(tǒng)的魯棒性。
在該結(jié)構(gòu)中,系統(tǒng)頂層的一級資源管理RM駐留在平臺系統(tǒng)中的系統(tǒng)控制模塊上。通過內(nèi)部高速交換網(wǎng)絡(luò)管理系統(tǒng)中的其他功能單元,如FPGA通用信號處理單元、DSP通用信號處理單元、RapidIO網(wǎng)絡(luò)交換單元等,管理內(nèi)容包括軟件加載、程序啟動、模塊健康狀態(tài)查詢等。
模塊級的資源管理駐留在每個處理器上,通過資源管理、配置管理、網(wǎng)絡(luò)管理和健康管理的配合實現(xiàn)模塊和處理器的資源管理,并配合控制管理進行軟件加載和功能線程管理。
3.2 系統(tǒng)資源管理
資源管理(Resource Management,RM)的主要功能是對通用資源進行標(biāo)識和狀態(tài)維護,確保資源的可用性。資源管理是實現(xiàn)功能線程的基礎(chǔ),只有通過對所有通用的資源進行管理,統(tǒng)籌調(diào)度硬件、軟件和網(wǎng)絡(luò)資源,才能夠?qū)崿F(xiàn)各種功能線程,并且在相同的硬件平臺上實現(xiàn)不同的功能。資源管理軟件功能需要平臺系統(tǒng)所有的通用處理模塊配合系統(tǒng)控制模塊來實現(xiàn)。
在平臺系統(tǒng)中,功能線程是若干個相互關(guān)聯(lián)的程序進程相互通信、協(xié)同處理而形成的。而程序進程只是需要運行的軟件代碼和數(shù)據(jù)空間,在沒有加載到特定的處理器上之前程序進程并不能完成任何功能。這就要求對軟件資源和硬件資源進行分類,軟件資源和硬件資源匹配后才能正確綁定并運行。運行了基礎(chǔ)軟件的底層硬件對象能夠在控制管理的指令下加載和卸載程序進程,同時控制程序進程的運行狀態(tài),如就緒、運行、暫停、停止、重新運行等,此外應(yīng)用程序還通過底層硬件對象進行參數(shù)加載、模式切換等功能。應(yīng)用軟件也需要調(diào)用底層操作系統(tǒng)和網(wǎng)絡(luò)通信等功能支持,程序進程和硬件平臺的結(jié)合才行形成特定的功能組件。
通用硬件資源的狀態(tài)包括空閑、就緒、運行、停止和故障等狀態(tài),如圖4所示。硬件模塊在自檢成功后進入空閑狀態(tài),等待控制管理按照當(dāng)前的工作模式確定需要運行的功能線程并加載程序映像,成功加載后進入就緒狀態(tài),在隨后的運行過程中,硬件資源一直都是被占用狀態(tài),直到程序進程停止運行并成功卸載;加載完成后,軟件和硬件已經(jīng)完成了綁定,程序進程可以運行實現(xiàn)處理功能,程序進程成功啟動后,模塊進入運行狀態(tài),如果啟動失敗則進入故障狀態(tài);程序進程啟動后,模塊處于運行狀態(tài),收發(fā)數(shù)據(jù)并完成運行功能,在功能線程沒有停止之前,硬件不能進行軟件卸載,以免引起其他硬件模塊的程序進程運行錯誤,在接到停止指令后,硬件處于停止?fàn)顟B(tài),并不運行功能和收發(fā)數(shù)據(jù),此時可以進行軟件卸載。

圖4 通用硬件資源的工作狀態(tài)機
程序進程作為平臺系統(tǒng)中可獨立加載和調(diào)度管理的應(yīng)用軟件對象,其工作狀態(tài)及轉(zhuǎn)換條件如圖5所示。
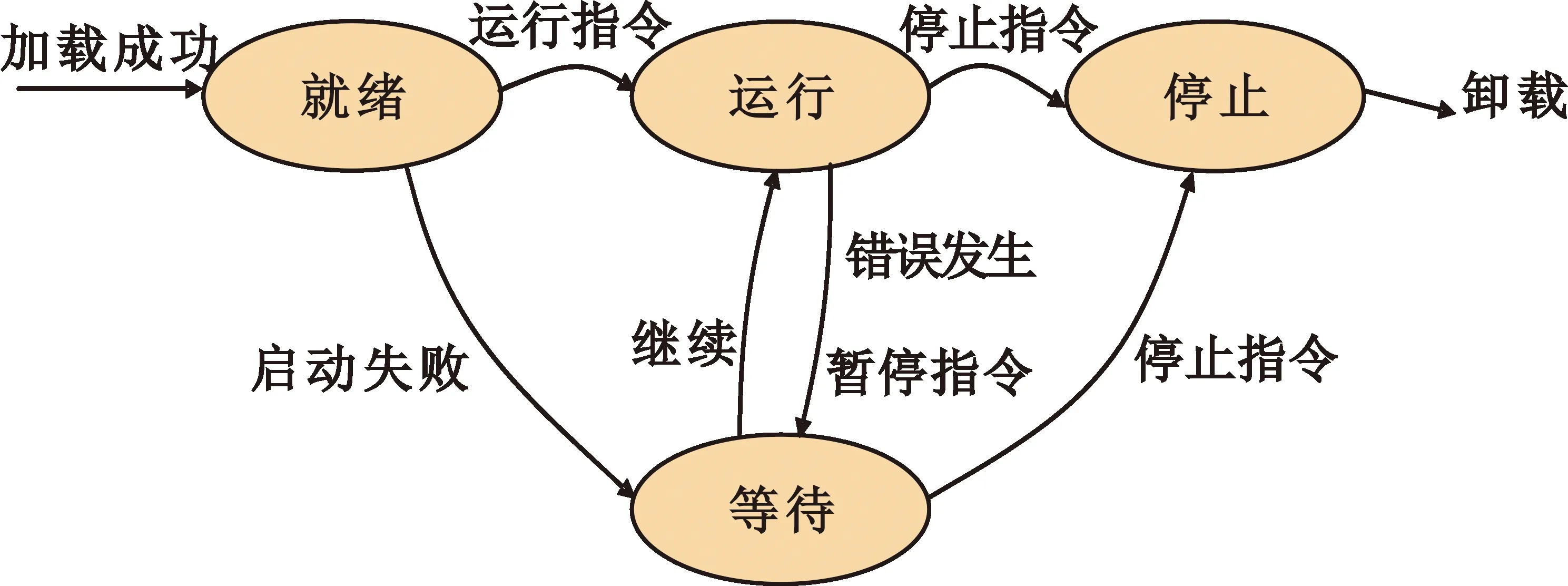
圖5 程序進程的工作狀態(tài)機
加載成功后程序進程進入就緒狀態(tài),在收到啟動指令后,程序進程開始啟動運行,打開通信端口獲得虛通道,創(chuàng)建本地工作線程,如果啟動條件不滿足或者過程發(fā)生錯誤,則進入等待狀態(tài),掛起本地線程,停止數(shù)據(jù)收發(fā),等待條件滿足時再繼續(xù)運行;如果在運行條件得不到滿足或者錯誤無法排除,此時功能線程無法正常運行,控制管理將對該功能線程進行停止操作,程序進程也隨即進入停止?fàn)顟B(tài),終止本地線程,停止數(shù)據(jù)收發(fā),關(guān)閉通信端口,軟件停止后可以進行軟件卸載。
3.3 系統(tǒng)配置管理
平臺系統(tǒng)配置管理(Configuration Management,CM)實現(xiàn)處理節(jié)點上的軟件硬件資源的匹配和動態(tài)加載,并負(fù)責(zé)功能線程的參數(shù)加載和工作模式設(shè)置,從而完成功能線程的組裝、控制和狀態(tài)維護。
在運行的任務(wù)模式由A狀態(tài)切換到B狀態(tài)時,運行在底層的CM將首先根據(jù)當(dāng)前的工作模式進行任務(wù)模式分析,根據(jù)藍(lán)圖或者事先預(yù)定任務(wù)狀態(tài)確定需要運行的功能線程,進而確定功能線程在當(dāng)前硬件模塊上需要運行的程序進程;確定程序進程和當(dāng)前模塊的狀態(tài),得到程序進程的標(biāo)識,并檢測其運行環(huán)境要求是否與本地環(huán)境相符;在加載程序之前,還需要確定當(dāng)前模塊處于空閑狀態(tài),進行模塊級的自檢,確定模塊的處理單元、路由單元和網(wǎng)絡(luò)接口單元等外圍設(shè)備都工作正常;隨后模塊支持單元通過網(wǎng)絡(luò)加載程序進程到指定模塊。
3.4 系統(tǒng)網(wǎng)絡(luò)管理
平臺系統(tǒng)網(wǎng)絡(luò)管理(Network Management,NM)通過在系統(tǒng)控制模塊上運行的網(wǎng)絡(luò)管理軟件實現(xiàn)對網(wǎng)絡(luò)的維護和路由配置。平臺系統(tǒng)內(nèi)部高速交換網(wǎng)絡(luò)采用串行RapidIO高速總線技術(shù),在數(shù)據(jù)能夠正確傳輸之前,必須對網(wǎng)絡(luò)進行初始化,對路由進行配置管理,同時維護各節(jié)點的網(wǎng)絡(luò)接入的正常工作。因此,網(wǎng)絡(luò)管理的功能主要有枚舉發(fā)現(xiàn)RapidIO的所有網(wǎng)絡(luò)節(jié)點(包括交換節(jié)點和邊緣節(jié)點),建立并維護網(wǎng)絡(luò)節(jié)點之間的拓?fù)潢P(guān)系和節(jié)點通信資源的管理維護表;實現(xiàn)和所有邊緣通信節(jié)點的信息交互,并監(jiān)控所有網(wǎng)絡(luò)節(jié)點的網(wǎng)絡(luò)通信狀態(tài);接收并執(zhí)行系統(tǒng)控制下達的網(wǎng)絡(luò)操作指令,上報指令執(zhí)行結(jié)果以及網(wǎng)絡(luò)資源和資源運行狀態(tài),如圖6所示。

圖6 網(wǎng)絡(luò)管理負(fù)責(zé)維護整個網(wǎng)絡(luò)的正常運行
在平臺系統(tǒng)中,存在類似于圖6的網(wǎng)絡(luò)連接關(guān)系。在系統(tǒng)上電后,網(wǎng)絡(luò)交換模塊對整個網(wǎng)絡(luò)進行掃描,發(fā)現(xiàn)網(wǎng)絡(luò)中的交換節(jié)點和處理器節(jié)點,然后將處理器的信息上報給機箱中的控制管理模塊。運行過程中,網(wǎng)管軟件還需要建立各RapidIO處理器節(jié)點之間默認(rèn)通道,通過該通道進行網(wǎng)絡(luò)配置和建立路徑,同時監(jiān)控各處理器節(jié)點的網(wǎng)絡(luò)接口單元的正常工作,一旦發(fā)現(xiàn)網(wǎng)絡(luò)接口單元錯誤或者掉線,立即上報系統(tǒng)控制管理模塊。
3.5 系統(tǒng)健康管理
平臺系統(tǒng)健康管理(Health Management,HM)在子系統(tǒng)中的特殊功能模塊和基礎(chǔ)支持模塊都具有特定的功能,其健康管理是啟動健康管理軟件周期運行自檢功能。
對于平臺系統(tǒng)中的通用功能模塊其健康管理由基礎(chǔ)平臺和功能軟件兩方面組成。基礎(chǔ)平臺包括硬件平臺和基礎(chǔ)軟件,這些部分的狀態(tài)由模塊上的MSU來完成。MSU通過監(jiān)測和查詢網(wǎng)絡(luò)接口單元和處理單元的工作狀態(tài)可以發(fā)現(xiàn)部分故障,如有錯誤發(fā)生,MSU向本機箱中的控制管理模塊上報錯誤信息。
通用功能模塊的基礎(chǔ)平臺正常工作并不能確定功能線程是否運行正常,各功能線程需要設(shè)計功能線程的健康管理機制,通過通信的超時檢測以及線程狀態(tài)管理等功能,及時發(fā)現(xiàn)本地處理器上的線程或線程組發(fā)生的錯誤,如有錯誤發(fā)生,功能線程直接上報平臺系統(tǒng)中的系統(tǒng)控制模塊。
健康管理還有一個重要的功能,就是能夠記錄本地發(fā)生的錯誤和故障,這些錯誤信息將是故障診斷和系統(tǒng)調(diào)試的重要依據(jù)。
4 感知輔助的抗干擾智能測控技術(shù)
采用了“偵通一體的干擾感知技術(shù)”和“感知輔助的鏈路級安全防護技術(shù)”,有效規(guī)避干擾。下行廣播采用突發(fā)+擴跳頻體制,突破傳統(tǒng)連續(xù)波體制,信號波形表現(xiàn)為時域的一個突發(fā),確保抗干擾低截獲能力。上行鏈路采用擴頻體制,同時結(jié)合型號項目要求的擴頻增益,提高抗干擾容限。
敵方無源探測設(shè)備的脈沖分選功能受輻射信號在時域、空域、頻域的穩(wěn)定性和規(guī)律性影響,因此,設(shè)計靜默態(tài)提高隱蔽性,并且下行廣播和上行接入信道的交互節(jié)拍可隨時調(diào)節(jié)。通過機載測控終端輻射信號的最大不確定性設(shè)計,即采用最小輻射能量自適應(yīng)功率控制技術(shù),使機載測控終端根據(jù)實際作用距離、信息速率及信道評估情況,在保證其性能指標(biāo)不影響作戰(zhàn)使用的前提下,輻射最優(yōu)的射頻功率,減小被敵方無源偵察裝備發(fā)現(xiàn)或截獲的距離,使敵方無法對我方信號進行穩(wěn)定的截獲,可以直接影響無源探測設(shè)備的分選識別功能,使其無法進行測向、測距、定位等。
地面/艦面站使用定向天線,廣播信道傳輸幀內(nèi)含GPS信息,可以輔助地面進行目標(biāo)角度計算,進一步控制地面定向天線的指向,因此,除了近距離接入場景使用全向天線,其他上行接入及通信階段都采用定向天線,在能、空兩個維度大大降低敵方截獲概率;同時由于接收信號也具有方向性,提高了接收信號的抗干擾、抗入侵、防欺騙能力。
5 實物結(jié)構(gòu)
綜合化平臺設(shè)備采用標(biāo)準(zhǔn)VPX 3U 5槽機箱架構(gòu),內(nèi)置板卡采用標(biāo)準(zhǔn)3U VPX導(dǎo)冷板卡和FMC子卡的結(jié)構(gòu),外形尺寸161.35 mm(寬)×148.2 mm(高)×216 mm(深),質(zhì)量小于等于6.5 kg。外形及安裝方式如圖7所示。

圖7 5槽3U VPX機箱
6 結(jié) 論
綜合化開放平臺技術(shù)是提升無人機系統(tǒng)互操作性的有效手段。基于綜合化開放平臺的系統(tǒng)設(shè)計可以根據(jù)作戰(zhàn)任務(wù)靈活配置無人機系統(tǒng)有效載荷,通過快速增加、減少、改變相關(guān)功能模塊,打造多任務(wù)作戰(zhàn)平臺,實現(xiàn)了艦載型和陸基型兩種模態(tài)通用化硬件平臺的研制;支持將兩種體制的功能加載進來進行統(tǒng)一管控,實現(xiàn)了地面站與地面站、地面站與艦面站、艦面站與艦面站之間的多站一機管控?zé)o縫切換;通過標(biāo)準(zhǔn)化接口實現(xiàn)了與其他無人機平臺的互操作,有效支持跨平臺資源共用、信息共享、優(yōu)勢互補,形成體系作戰(zhàn)能力,同時采用智能化抗干擾低截獲技術(shù)提高了無人機的作戰(zhàn)效能,可以滿足未來復(fù)雜戰(zhàn)場的作戰(zhàn)需求。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
今日農(nóng)業(yè)(2022年15期)2022-09-20 06:56:20
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
雜文月刊(2016年1期)2016-02-11 10:35:51
現(xiàn)代企業(yè)(2015年8期)2015-02-28 18:54:47
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:32:55