人工智能背景下工業(yè)機器人發(fā)展動態(tài)
2021-06-03 06:10:50德州職業(yè)技術(shù)學(xué)院
電子世界 2021年9期
德州職業(yè)技術(shù)學(xué)院 任 斌
隨著信息技術(shù)的發(fā)展,社會已進入到人工智能時代,使得智能機器人在多個領(lǐng)域中得到應(yīng)用。特別是在工業(yè)領(lǐng)域之中,合理引入人工智能機器人不僅能夠優(yōu)化工業(yè)生產(chǎn)模式,還可以完成更高精度的生產(chǎn)任務(wù),可以說人工智能背景下的工業(yè)機器人會成為工業(yè)領(lǐng)域發(fā)展的必然趨勢。因此,本文首先對工業(yè)機器人的構(gòu)成以及類型加以明確;其次,對人工智能背景下工業(yè)機器人的技術(shù)研究展開分析;在此基礎(chǔ)上,提出人工智能背景下工業(yè)機器人的發(fā)展趨勢。
在人工智能技術(shù)發(fā)展的進程中,互聯(lián)網(wǎng)技術(shù)也得到了全面的優(yōu)化,而以大數(shù)據(jù)技術(shù)作為核心的工業(yè)機器人,在整體產(chǎn)品性能方面得到了完善。當(dāng)前的工業(yè)機器人在具體操作方面逐漸向著便捷化的方向發(fā)展,并且還保留著極高的精準度,也正是由于這一特點,使其在不同領(lǐng)域中都得到了應(yīng)用。
1 工業(yè)機器人的構(gòu)成和類型
從工業(yè)機器人基本構(gòu)成的角度來看,工業(yè)機器人內(nèi)部可以劃分為三個主要系統(tǒng),分別為驅(qū)動系統(tǒng)、本體以及控制系統(tǒng)。工業(yè)機器人最基本的功能就是對人類做出的種種行為進行模仿,并且其還應(yīng)當(dāng)具備著較強的智能化標準,使得工業(yè)機器人能夠在實際操作中更好地發(fā)揮仿生學(xué)的特征,保證工作的的自由程度。在我國目前工業(yè)發(fā)展的進程中,大力應(yīng)用工業(yè)機器人的主要原因就在于其單機價格相對較低,便于后續(xù)的維護和修理。
2 人工智能背景下工業(yè)機器人的技術(shù)研究
2.1 將電機和高精度驅(qū)動器作為核心
在對工業(yè)機器人進行控制的過程中,電機和高精度驅(qū)動器都能夠發(fā)揮出十分顯著的作用,其可以進一步完善控制系統(tǒng)管理方式。同時,其中具備的快響應(yīng)伺服控制技術(shù)可以高效控制各種技術(shù),簡單來說,就是借助干擾觀測法來建立內(nèi)部預(yù)測模型,更好的發(fā)揮出閉環(huán)的優(yōu)化作用。由此可以看出,將高精度驅(qū)動器或是電機作為工業(yè)機器人的核心,能夠全方位的控制工業(yè)機器人。
2.2 將高精度減速機作為核心
目前,工業(yè)機器人關(guān)鍵部位的構(gòu)成主要是高精度減速機,其中還涉及到了完全不同的技術(shù)形式。首先,在材料成型控制技術(shù)方面必須要進行科學(xué)的選擇,特別是在減速機齒輪自設(shè)的耐磨性以及剛性發(fā)展方面更要保證其達到標準,從根本上提升運行精準度;其次,要選擇好相應(yīng)的加工技術(shù),在高精度減速機的實際應(yīng)用過程中,非標特殊軸承也是其中的關(guān)鍵組成部分,具有十分顯著的結(jié)構(gòu)特殊性,這就需要利用高精度減速機來進一步明確工作標準,保證非特殊軸承的穩(wěn)定性。
3 人工智能背景下工業(yè)機器人發(fā)展的主要趨勢
3.1 提升工業(yè)機器人的穩(wěn)定性
在當(dāng)前社會經(jīng)濟高速發(fā)展的背景下,越來越多類型的人工智能機器人在不同的行業(yè)中得到了較為廣泛的應(yīng)用,這也對各個工廠的發(fā)展水平提出了更高要求。目前不同種類的工業(yè)機器人,雖然在購買單價方面呈現(xiàn)出逐步降低的趨勢,但在整體性能以及工作穩(wěn)定性方面,都得到了十分顯著的提升。舉例說明,如圖1所示,工業(yè)機器人的機械手就是通過模仿人類手臂性能的方式,實現(xiàn)自動化搬運和自動化抓取等工作內(nèi)容。在現(xiàn)階段的發(fā)展中,全世界范圍內(nèi)的制造業(yè)及相關(guān)工業(yè),其在具體的工作環(huán)節(jié)中都加大了對于工業(yè)機器人機械手的應(yīng)用力度,特別是在那些重復(fù)性相對較高的工作中,機械手更是能夠在相對有限的時間內(nèi)高效完成這些重復(fù)性工作,這也是工業(yè)機械手的優(yōu)勢所在。在互聯(lián)網(wǎng)技術(shù)和人工智能技術(shù)全面提升帶來的影響下,工業(yè)機器人內(nèi)部的故障診斷系統(tǒng)以及控制系統(tǒng)也得到了較為顯著的提升,這也為工業(yè)機器人性能的提升奠定了堅實基礎(chǔ)。
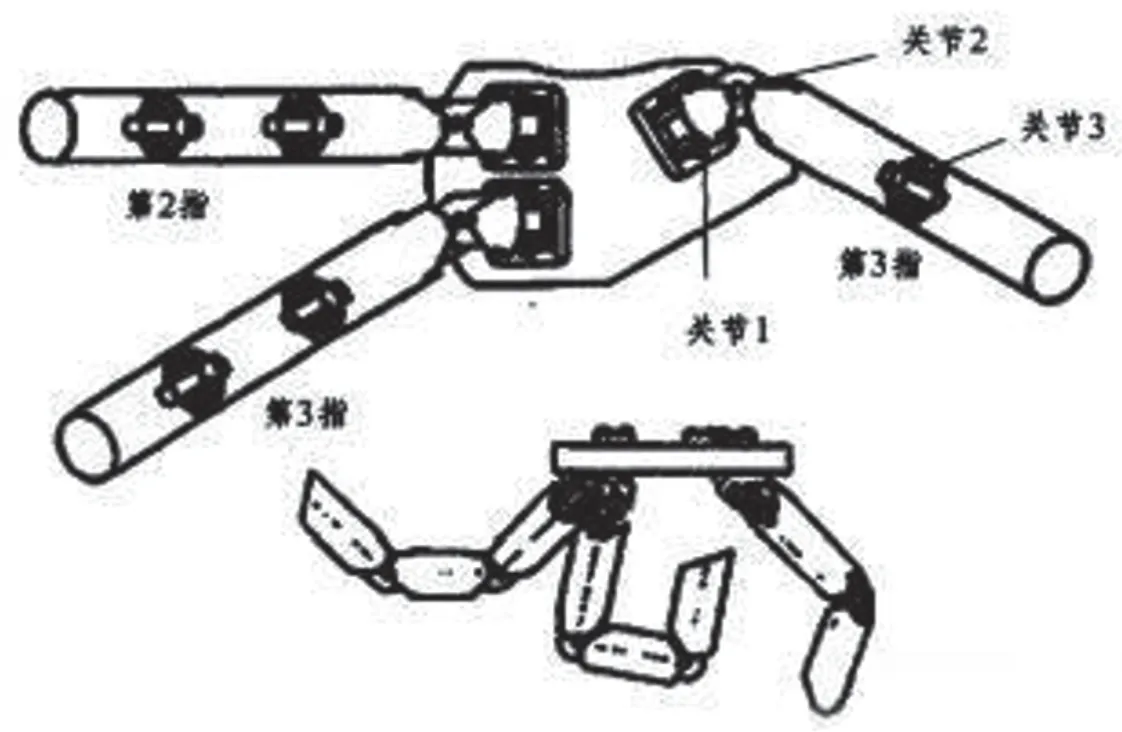
圖1 工業(yè)機械手的基本結(jié)構(gòu)

圖2 工業(yè)機器人的主要類型
3.2 工業(yè)機器人向著生物性以及仿生性方向發(fā)展
如圖2所示,工業(yè)機器人有多種類型。部分特殊的工業(yè)生產(chǎn)環(huán)境會對人類的身體健康帶來一些負面的影響,這也是人類無法在此類工業(yè)環(huán)境中長時間工作的主要原因。舉例說明,在半導(dǎo)體工業(yè)當(dāng)中,其中關(guān)鍵的真空室內(nèi)傳輸工作環(huán)節(jié)是很難通過人力所完成的,這也進一步體現(xiàn)出真空工業(yè)機器人在半導(dǎo)體工業(yè)的實際生產(chǎn)階段中的作用所在。除此之外,各類水下工作過程中可能面臨的復(fù)雜環(huán)境,也可以通過工業(yè)機器人來進行更好的解決。通過不斷的實踐和研究可以看出,蛇形仿生工業(yè)機器人在水下工作中能夠發(fā)揮出更好的作用,這也使得生物性以及仿生性必然會成為未來工業(yè)機器人發(fā)展的關(guān)鍵內(nèi)容和必然趨勢之一。
3.3 工業(yè)機器人傳感器融合配置技術(shù)的優(yōu)化
在目前的人工智能背景下,智能化發(fā)展也成為了工業(yè)機器人未來的發(fā)展方向之一,而怎樣能夠讓工業(yè)機器人實現(xiàn)智能化發(fā)展,也是我們當(dāng)前面臨的重要研究方向。通過學(xué)習(xí)世界發(fā)達國家工業(yè)機器人發(fā)展的經(jīng)驗和國內(nèi)相關(guān)技術(shù)人員的創(chuàng)新探索,發(fā)現(xiàn)傳感器能夠在智能工業(yè)中起到重要作用。傳感器可以劃分為三維傳感器、視覺傳感器等,并且在智能工業(yè)機器人中,傳感器仍起到關(guān)鍵作用。在智能工業(yè)機器人不斷發(fā)展的進程中,能夠遠距離進行遙控操作的機器人,已經(jīng)成為了傳感器配置技術(shù)發(fā)展中提升自身智能化水平的關(guān)鍵所在。因此,在實際發(fā)展進程中,必須要提高對傳感器融合配置技術(shù)的重視程度,并展開功能更加完善的優(yōu)化改進,從而促進工業(yè)機器人技術(shù)的發(fā)展。
3.4 有效改進工業(yè)機器人的控制系統(tǒng)
控制系統(tǒng)是工業(yè)機器人最為關(guān)鍵的組成部分,其中涉及到的坐標設(shè)置功能、記憶功能以及示教功能,都是工業(yè)機器人中的關(guān)鍵功能。在當(dāng)前計算機技術(shù)不斷完善優(yōu)化的背景下,工業(yè)機器人內(nèi)部的控制系統(tǒng)也得到了全方位的優(yōu)化發(fā)展。在經(jīng)過相應(yīng)研究后能夠看出,工業(yè)機器人的控制系統(tǒng)中,具體包括了以下幾個環(huán)節(jié),工業(yè)機器人內(nèi)部的控制器能夠?qū)⒃镜姆忾]式控制器轉(zhuǎn)變?yōu)殚_放式的控制器,簡單來說,計算機對于工業(yè)機器人所進行的控制也有著統(tǒng)一的標準進行限制。這種工作方式要求工業(yè)機器人的操作人員,只需要理解與機器人相關(guān)的理論知識就可以進行實際操作,這也為工業(yè)機器人后續(xù)的維修管理提供了極大的便利,能夠更好的節(jié)約成本。
結(jié)論:在未來工業(yè)的發(fā)展進程中,必須要重視人工智能技術(shù)對工業(yè)機器人發(fā)展的促進作用,只有這樣才可以更好的對工業(yè)機器人的發(fā)展趨勢進行準確的把握。同時,在實際工作中,還應(yīng)當(dāng)在工業(yè)機器人領(lǐng)域中強化仿生學(xué)技術(shù)的應(yīng)用,通過優(yōu)化系統(tǒng)功能的方式來實現(xiàn)工業(yè)機器人自身智能化水平的提升,從根本上提升行業(yè)標準化水平,進一步發(fā)揮工業(yè)機器人自身所具備的技術(shù)優(yōu)勢,提升我國工業(yè)發(fā)展質(zhì)量。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
中國核電(2021年3期)2021-08-13 08:56:36
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
商界(2019年12期)2019-01-03 06:59:05
IT經(jīng)理世界(2018年20期)2018-10-24 02:38:24
華人時刊(2017年21期)2018-01-31 02:24:01
小康(2017年16期)2017-06-07 09:00:59
北方交通(2016年12期)2017-01-15 13:52:53