基于組態王及PLC的架空乘人裝置電控系統研究
2021-06-05 09:17:38王強強
機械管理開發 2021年4期
關鍵詞:系統
王強強
(山西汾西礦業(集團)有限責任公司賀西煤礦,山西 柳林 033300)
隨著礦井采掘范圍的擴展,工作人員從地面到作業點路程不斷增加,同時井下布置有各種斜巷,若采用步行方式行走至作業點需要耗費大量的體力以及時間,從而在一定程度上制約礦井生產[1~3]。架空乘人裝置憑借其適應性強、運輸效率高、安全可靠等優點在煤礦井下應用較為廣泛[4~6]。為了更好的促進架空乘人裝置運行,本文基于組態王及PLC對架空乘人裝置電控系統進行研究,以期達到降低設備磨損及能耗,并提高架空乘人裝置使用壽命的效果。
1 架空乘人裝置電控系統結構
1.1 總體結構
架空乘人裝置電控系統結構主要包括有地面控制PC、監控分站、井下PLC主站等。地面控制PC用以監測并控制架空乘人裝置運行;PLC主站用以采集各監控分站信息并將數據經工業以太網傳輸給地面控制PC,與就地控制箱進行數據交互;機尾監控分站用以采集到站、越站、上下人以及重錘等信號;其余的監控分站用以采集各安全傳感器信號、甩道開車信號等。具體電控系統結構見圖1。
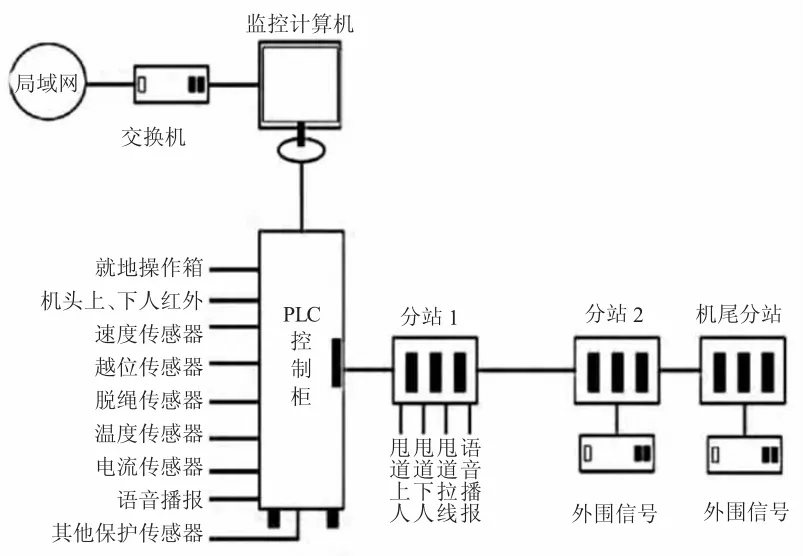
圖1 架空乘人裝置電控系統結構
電控系統運行原理為[7~8]:上位機控制PLC運行,PLC通過控制程序發出控制指令給抱閘繼電器并經過2s延時與主電動機接觸器聯通,同時通過主電動機接觸器將控制信號傳輸給變頻器或磁力啟動器,實現架空乘人裝置軟啟動。當控制臺或上位機發出復位、停止、檢修等功能指令時,可通過PLC實現復位、停止以及檢修控制。外部各保護開關與PLC控制器連接,實現架空乘人裝置的各項保護功能。
1.2 硬件結構
1.2.1硬件選型
架空乘人裝置往返運輸井下作業人員,對系統運行穩定性及可靠性有較高要求。為此,PLC選用可靠性強、模塊化的S7-1200系列,具體PLC各功能模塊結構見表1。上述功能模塊應按照預先排列順序在導軌上布置,具體分布見圖2。

表1 功能模塊參數
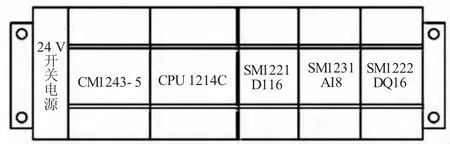
圖2 模塊排布序列
1.2.2 硬件結構組成
架空乘人裝置電控系統涉及到的硬件結構有PLC控制器、輸入及輸出模塊、外圍安全傳感器、交換機、防爆語音箱等。PLC是整個電控系統核心單元,外圍布置的各類安全傳感器監測數據通過模擬量輸入模塊傳輸給PLC,PLC通過控制繼電器來控制架空乘人裝置運行。
外圍安全傳感器主要有拉線、電流、溫度、紅外、壓力、脫繩以及速度傳感器等,從而以各類傳感器監測結果及時判斷架空乘人裝置是否出現運行故障,在一定程度上提升架空乘人裝置運行可靠性。具體硬件結構組成見圖3。
2 架空乘人裝置電控系統軟件結構
根據上述功能的需要,分配PLC控制器中I/O點,確定外部輸入元件與PLC內部I/O點的連接對應關系,并完成對I/O點地址的定義,從而便于后續的電控系統軟件結構設計。具體電控系統部分輸入輸出代碼及去向見表2。
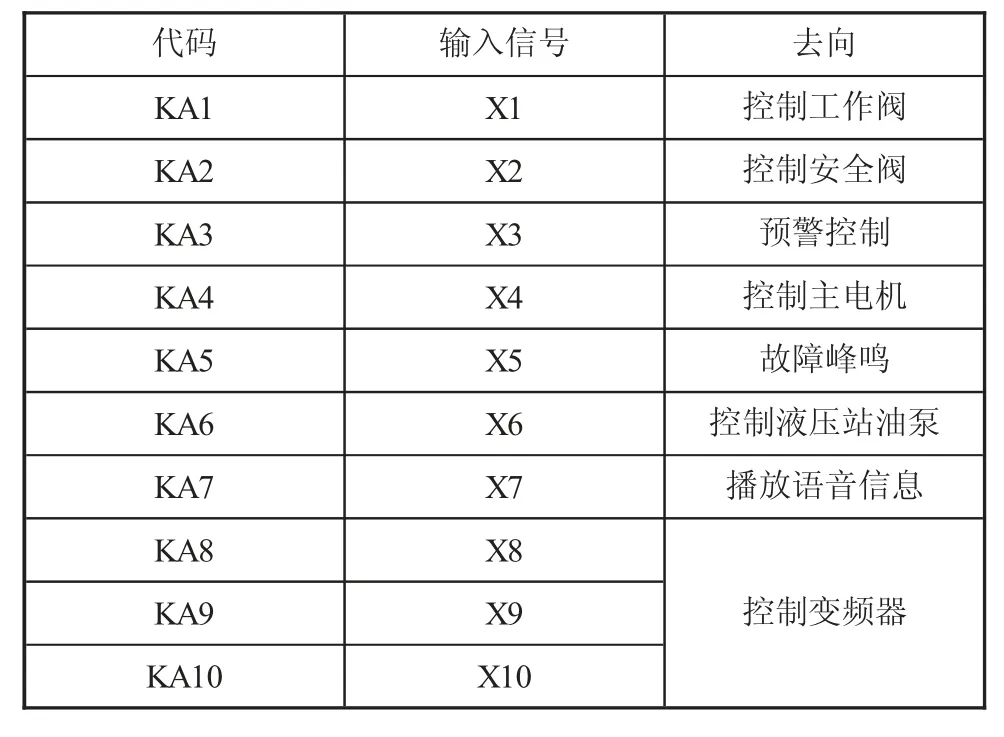
表2 PLC部分端口I/O分配
電控系統開始運行后,語音警報裝置首先發出5 s峰鳴聲表示架空乘人裝置馬上啟動運行,乘坐人員應注意安全。隨后安全閘解除制動,制動器電機啟動后制動器解除制動,主電動機通過減速器帶動架空乘人驅動裝置運轉。在主電動機運行前對電動機及整個系統進行檢查,若發現故障狀態則停止電動機啟動,制動器及安全閘重新動作;若電控系統及主電動機均無故障則主電動機正常啟動運行。主電動機運行2 s后由計算器對是否出現超載進行判定,若超載則主電動機停止運行并發出超載預警;若不超載則架空乘人裝置正常運行。
在電控系統正常運行過程中,通過各安全傳感器檢測架空乘人裝置運行情況,若檢測到有故障信息則電控系統發出報警信息并顯示故障發生位置。具體電控系統軟件控制流程見圖4。
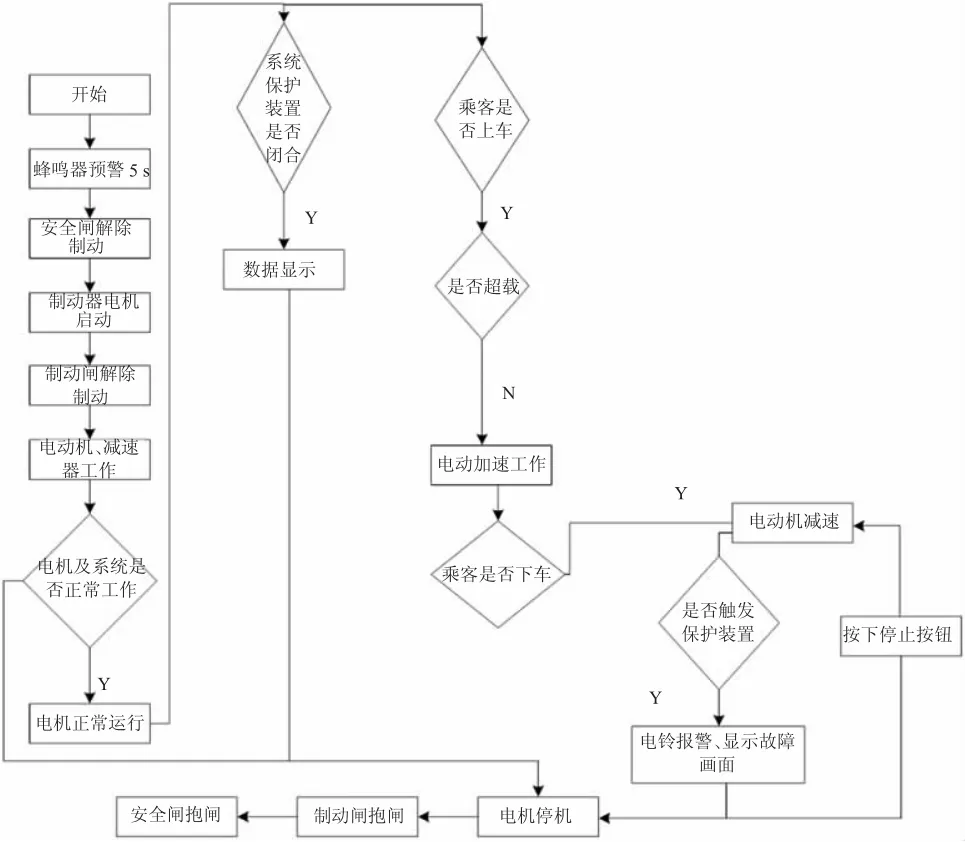
圖4 電控系統軟件控制流程
架空乘人裝置電控系統根據運輸需要應具備自動、手動、檢修、就地等控制模塊式,同時上位機可顯示架空乘人裝置的運行狀態(如在乘人數、運行速度、故障信息等)。在架空乘人裝置運行沿線布置有語音警報裝置,上下車點均具備語音警示功能,且沿線布置的通話裝置應與地面監控中心直接通話。在機頭、機械尾以及大邊坡點等位置布置脫繩保護,傳感器對電機電壓、電流等進行監測,當監測異常時電控系統即會發出報警信號。在上下口及中部位置設置緊急停車按鈕,當任一位置緊急停車按鈕啟動后,必須手動復位,架空乘人裝置才可繼續運行。
3 結語
架空乘人裝置在礦井工作人員運輸中具有廣泛應用,提升架空乘人裝置電控系統運行可靠性及穩定性,對確保運輸安全具有重要意義。本文依據煤礦行人運輸技術要求,根據相關要求規范,基于組態王以及PLC提出的一種架空乘人裝置電控系統,可實現對架空乘人裝置的精準控制、便捷操作、遠程監控及架空乘人裝置的無人值守,取得較好的應用效果。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32