室內(nèi)電力巡檢機(jī)器人的設(shè)計(jì)與實(shí)現(xiàn)
2021-06-09 01:32:58南方電網(wǎng)超高壓輸電公司天生橋局姚傳濤褚海洋陳田濟(jì)凡莫云曉王學(xué)埕
電力設(shè)備管理 2021年5期
關(guān)鍵詞:信息
南方電網(wǎng)超高壓輸電公司天生橋局 姚傳濤 褚海洋 王 坤 陳田濟(jì)凡 莫云曉 王學(xué)埕
2020年全國共發(fā)生電力人身傷亡事故36起,死亡45人。如能廣泛應(yīng)用室內(nèi)巡檢機(jī)器人,
這一數(shù)值可能會(huì)大大降低。目前用電量增加了許多,相對(duì)變電站的巡檢要求也隨之提高,從而大大提高了對(duì)室內(nèi)電力巡檢機(jī)器人的需求程度。
1 需求分析
自2010年以后,我國涌現(xiàn)了諸多研究機(jī)構(gòu)和廠家開展了巡檢機(jī)器人的相關(guān)研究工作,并在多個(gè)變電站完成了試運(yùn)行[1]。本文所設(shè)計(jì)的機(jī)器人主要核心將集中在明確所在位置、下一步工作是什么,以及怎樣去那里完成巡檢任務(wù)。所以要求所設(shè)計(jì)的機(jī)器人應(yīng)擁有以下功能:能以較快速度準(zhǔn)時(shí)駛向既定的巡檢任務(wù)地點(diǎn);在行駛過程中能智能回避各種障礙物,能做到不碰觸高危設(shè)備,確保自身的安全性;能安全順利通過升降門;通過可視化的操作界面能直接設(shè)定機(jī)器人的巡檢任務(wù)以及查看其工作狀態(tài);能在操作界面遠(yuǎn)程遙控機(jī)器人完成巡檢任務(wù),并根據(jù)實(shí)際需要予以拍照。
2 總體設(shè)計(jì)
2.1 總體架構(gòu)
本文所設(shè)計(jì)的機(jī)器人將主要具有以下功能:自動(dòng)定位所在位置、自動(dòng)確定導(dǎo)航路徑、智能規(guī)避障礙物、智能拍照、實(shí)時(shí)上傳巡檢信息(圖1),最上層是上位機(jī)管理系統(tǒng),主要提供機(jī)器人運(yùn)行狀態(tài)查看、設(shè)置巡檢路線、發(fā)布巡檢任務(wù)和拍照對(duì)象,以及提供手動(dòng)遙控機(jī)器人的功能。中間層是邏輯核心層,是機(jī)器人的中央控制以及業(yè)務(wù)處理系統(tǒng),借助傳感器與攝像頭來探測周邊情況。硬件系統(tǒng)主要負(fù)責(zé)承擔(dān)機(jī)器人的相關(guān)運(yùn)用功能,可以轉(zhuǎn)向以及給定速度行駛。
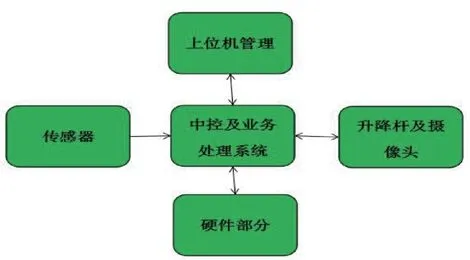
圖1 總體架構(gòu)示意圖
2.2 硬件架構(gòu)
機(jī)器人的硬件將主要由中樞控制器、四輪全向機(jī)器人平臺(tái)、垂直升降云臺(tái)及傳感器系統(tǒng)構(gòu)成。其中中樞控制器主要負(fù)責(zé)數(shù)據(jù)信息的采集和處理,對(duì)機(jī)器人的運(yùn)動(dòng)姿態(tài)予以實(shí)時(shí)監(jiān)控及控制。同時(shí)將機(jī)器人的傳感器數(shù)據(jù)信息、運(yùn)動(dòng)狀態(tài)信息等傳輸至中控機(jī),并對(duì)相應(yīng)的控制指令予以響應(yīng);四輪全向機(jī)器人平臺(tái)是機(jī)器人的承載平臺(tái),將借助4個(gè)麥克納姆輪實(shí)現(xiàn)驅(qū)動(dòng);垂直升降云臺(tái)在控制器以及直流無刷電機(jī)的驅(qū)動(dòng)及控制下,主要負(fù)責(zé)對(duì)機(jī)器人的多角度檢測;傳感器系統(tǒng)主要包括激光雷達(dá)、超寬帶定位模塊等傳感器而構(gòu)成,通過多種傳感器的協(xié)同配合,共同完成對(duì)機(jī)器人相關(guān)情況的判斷。
超聲測距。機(jī)器人由于將主要在電站的監(jiān)控室、生產(chǎn)車間等較為復(fù)雜的環(huán)境下執(zhí)行巡檢任務(wù),所以需實(shí)時(shí)探測和判斷周圍環(huán)境情況,是否存在障礙物、危險(xiǎn)不可碰觸高危設(shè)備等。避障傳感器主要是借助超聲探測方案來實(shí)現(xiàn)障礙物感知[2],其具有發(fā)生和接收超聲波的功能,當(dāng)發(fā)出的超聲波遇到障礙物后會(huì)發(fā)反射,接收器在接收到反射信號(hào)后將自動(dòng)將相關(guān)距離信息計(jì)算出來并提供給機(jī)器人。本設(shè)計(jì)將使用多個(gè)傳感模塊來構(gòu)成一個(gè)傳感器陣列,如此就能夠?qū)Χ鄠€(gè)單點(diǎn)距離的信息進(jìn)行綜合分析。
電量檢測。由于電池在放電過程中伴隨電量的減少其帶負(fù)載輸出電壓會(huì)下降較為明顯[3],所以通過數(shù)字量化輸出電壓就能實(shí)現(xiàn)對(duì)電池剩余電量的成功估計(jì)。但考慮到剩余電量與帶載輸出電壓兩者間并非線性關(guān)系,因此通過這樣的方法來估計(jì)得到的結(jié)果并不一定準(zhǔn)確,所以考慮預(yù)先對(duì)電池負(fù)載放電特性加以估計(jì)和測定,以便所獲得的電池電壓值變得更加準(zhǔn)確。
升降云臺(tái)。主要采用分布式控制的方式來控制垂直升降云臺(tái)的運(yùn)動(dòng)。驅(qū)動(dòng)器以及電機(jī)都將被配備控制器,在充分考慮成本的情況下對(duì)其予以模塊化設(shè)計(jì)。而控制器內(nèi)部將做到電機(jī)的閉環(huán)控制,把編碼器所反饋的角度信息讀取到以后作為反饋信號(hào),從而借此實(shí)現(xiàn)對(duì)電機(jī)控制執(zhí)行值的計(jì)算。其中水平控制單元主要負(fù)責(zé)水平方向的旋轉(zhuǎn),而垂直升降單元將主要負(fù)責(zé)垂直方向的運(yùn)動(dòng)。分立的控制單元將作為從設(shè)備掛載于中樞控制器的CAN總線,在實(shí)現(xiàn)對(duì)電機(jī)獨(dú)立控制的同時(shí)還可借助中樞控制器將相關(guān)協(xié)調(diào)工作做好。
通信接口。通過總線通信方式主要借助分立的控制器(Controller)來實(shí)現(xiàn)對(duì)中樞控制器連接的架構(gòu),各類傳感器(Sensor)也是通過這樣一種方式從而掛載于通信端口上。而中樞控制器將主要負(fù)責(zé)對(duì)各類數(shù)據(jù)的采集,并遵循設(shè)定的格式對(duì)這些數(shù)據(jù)加以打包傳輸。而上位機(jī)在收到相關(guān)指令信息后也會(huì)先將數(shù)據(jù)解析出來然后加以執(zhí)行。
系統(tǒng)電源。主要是指兩個(gè)部分,即中控機(jī)電源以及機(jī)器人平臺(tái)電源。其中針對(duì)工控機(jī)電源將使用獨(dú)立的鋰電池(12V、40Ah)。考慮到該電池存在電壓輸出不夠穩(wěn)定,將對(duì)其借助DC-DC予以升壓處理。平臺(tái)電源能借助平臺(tái)實(shí)現(xiàn)電壓的穩(wěn)定輸出,能滿足多個(gè)供電需求。
2.3 軟件系統(tǒng)
軟件系統(tǒng)包括中控機(jī)和上位機(jī),主要是底盤以上的層級(jí)。其中中控機(jī)主要負(fù)責(zé)控制底盤運(yùn)動(dòng)、攝像頭拍照以及控制云臺(tái)升降等核心任務(wù),上位機(jī)主要負(fù)責(zé)供用戶向機(jī)器人發(fā)布巡檢任務(wù)、查看機(jī)器人狀態(tài)及展示運(yùn)檢地圖等。
操作系統(tǒng)。為了機(jī)器人的各種功能能得以順利實(shí)現(xiàn),設(shè)計(jì)中將使用機(jī)器人操作系統(tǒng)ROS,這是專門針對(duì)機(jī)器人而開發(fā)出來的一種系統(tǒng),是一套開源的系統(tǒng)框架,具有通用性、開源性、復(fù)用性、社區(qū)性等諸多優(yōu)點(diǎn),由于具備諸多功能,同時(shí)能免費(fèi)用于商用或研究,因此有利于降低研究開發(fā)成本[4]。為使機(jī)器人變得更加契合室內(nèi)電力巡檢任務(wù),本研究將對(duì)定位和導(dǎo)航模塊予以相應(yīng)修改。本文所設(shè)計(jì)的機(jī)器人將主要使用3個(gè)節(jié)點(diǎn)(圖2),這些節(jié)點(diǎn)間將呈耦合分布式,基本能做到同時(shí)運(yùn)行,借助頻率較高消息隊(duì)列來實(shí)現(xiàn)消息的彼此傳遞。
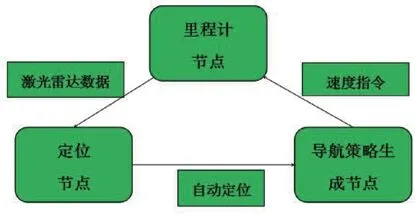
圖2 節(jié)點(diǎn)關(guān)系示意圖
定位模塊。主要通過對(duì)激光雷達(dá)(Laser radar)和超寬帶(UWB)數(shù)據(jù)的解析來獲得機(jī)器人的相關(guān)定位信息,但其會(huì)優(yōu)先借助濾波算法(Filtering algorithm)來對(duì)UWB的數(shù)據(jù)予以優(yōu)化,從而使所獲取的定位信息更加精確穩(wěn)定。還會(huì)運(yùn)用ROS的ACML包對(duì)線管數(shù)據(jù)再次加以計(jì)算,從而獲得最終的定位信息。該模塊既能夠?qū)蓚€(gè)定位信息予以單獨(dú)使用,也可以融合使用。
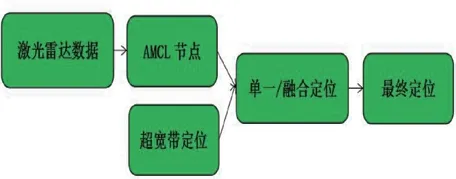
圖3 定位模塊示意圖
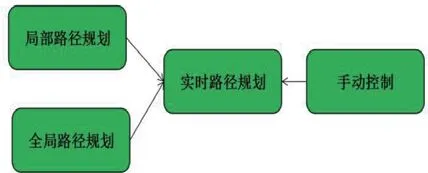
圖4 導(dǎo)航模塊示意圖
導(dǎo)航模塊。主要分為手動(dòng)控制、局部路徑規(guī)劃以及全局路徑規(guī)劃,通過局部、全局兩個(gè)子模塊彼此間的協(xié)同配合能實(shí)現(xiàn)實(shí)時(shí)路徑規(guī)劃。但當(dāng)機(jī)器人接收到手動(dòng)控制命令后,此時(shí)機(jī)器人的控制權(quán)將被工作人員所接管,從而自動(dòng)切換至手動(dòng)模式狀態(tài),以供工作人員手動(dòng)規(guī)劃機(jī)器人的巡檢路線。
巡檢模塊。機(jī)器人在接收到巡檢任務(wù)后將自動(dòng)規(guī)劃路線開始巡檢工作,期間依靠多個(gè)傳感器來判斷水平方向是否存在障礙物或不可觸碰高危設(shè)備。同時(shí)根據(jù)巡檢任務(wù)的實(shí)際需要,相關(guān)指令能夠及時(shí)傳達(dá)至攝像頭以及升降云臺(tái),從而對(duì)其升降高度以及拍攝角度進(jìn)行相應(yīng)調(diào)整,確保拍攝效果。巡檢功能主要還能完成危險(xiǎn)情況緊急制動(dòng)、通過升降門、設(shè)備拍照、手動(dòng)控制等等機(jī)器人功能。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
