XLPE電纜缺陷典型圖像信息采集及特征提取
2021-06-16 06:31:24劉哲任昂葛少偉蘇菲侯建峰
電子技術與軟件工程 2021年8期
關鍵詞:特征提取
劉哲 任昂 葛少偉 蘇菲 侯建峰
(國網山東省電力公司濟南供電公司 山東省濟南市 250000)
1 引言
電纜線路巡視可為電力系統電纜線路的安全可靠運行提供有力保障,但隨著電力電網產業飛速發展,城市電纜化率逐年提高,電纜線路巡視的工作量日益加大[1]。然而,電纜線路所處的通道復雜多樣,傳統電纜線路巡視技術由于各自的缺陷而不能有效滿足巡視要求,這些巡視技術的不足促進了無人機電纜線路巡視技術的出現和發展。針對無人機線路巡視技術的研究已經成為了電網巡視和無人機應用領域的一個研究熱點,這一方面的研究也取得了很多研究成果[2-4],然而尚缺乏關于無人機電纜線路巡視方面的應用研究。
目前,電纜線路的巡視一般采用傳統的人工現場巡視,需耗費大量的時間、人力,且效率較低,當線路通道可能積聚有害氣體時,人工巡視任務更為艱巨,且可能存在一定的人身安全隱患。近年來,我國廣泛開展了軌道式和履帶式機器人應用于電網巡視作業中的研究。但軌道式機器人作業受限于軌道安裝、經濟效益等多方面因素,尚不能完全滿足線路巡視需求,履帶式機器人無法清晰采集設備圖像,巡視效率較低。而無人機具有操控要求低、靈活易用、性價比高等優點,已逐漸推廣至礦井、隧道等巡視工作中[5-6]。
在無人機巡視過程中,采集的現場圖像是分析線路運行狀態的重要依據。但目前巡視過程中還存在一些問題,如現場作業過程中拍照點位置、角度、數量存在較大的差異性,可能會采集不必要的、不滿足要求的照片,增加后期分析工作量;圖像的不規范性不利于圖像的規范化管理與大數據分析,缺陷目標難以分割,缺陷特征難以提取;這些因素易影響巡視工作人員對缺陷的判斷和分析[7-15]。
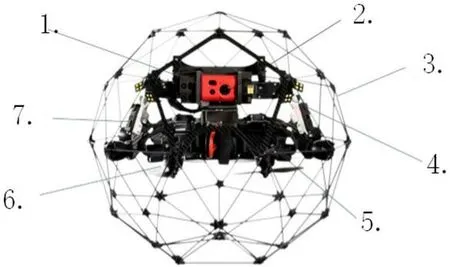
圖1:電纜通道用無人機結構

圖2:電纜外護套破損

圖3:電纜外護套燒蝕

圖4:電纜接頭紅外圖像
為使現場巡視效果達到最佳本文應用可碰撞無人機對電纜線路進行巡視,利用機載可見光、紅外設備通過懸停、定點拍照方式,對電纜通道隱患、本體及附件缺陷進行快速巡查,克服了復雜地形、未知環境給電纜線路巡視帶來的困難。通過分析無人機巡視過程中采集的典型缺陷圖像,采用Otsu 閾值法[16]及Kmeans 聚類[17]的圖像分割法,提取電纜線路典型缺陷特征,結合隨機森林算法[18],能夠準確識別缺陷類型,為推進無人機巡視實用化奠定良好的基礎。
2 電纜隧道用無人機
無人機巡視技術是利用機載可見光、紅外等設備,通過懸停、定點拍照等方式,對電纜線路本體缺陷、通道隱患進行快速巡查的技術,克服了復雜地形、未知環境給線路巡視帶來的困難,全方位獲取現場資料,具有效率高、受通道影響小、無人員安全風險等優點[3]。
電纜隧道用無人機結構如圖1 所示,其中:1.熱成像鏡頭;2.光學高清攝像頭;3.可碰撞防護網;4.LED 光源;5.可調節槳葉;6.電機;7.激光定位傳感器。與架空線用無人機不同之處在于防護網的使用,無人機安裝防護網后,可以在電纜通道內安全飛行,避免損傷通道內設備或無人機本體。同時,可見光與紅外配合,更利于發現電纜附件內部缺陷,為后期圖像處理提供了保障。
3 電纜線路典型缺陷采集
當電纜線路存在隱患或故障時,無法保證檢修人員人身安全,因此可采用無人機及時獲取電纜線路環境信息及電纜運行狀況,協助運維人員解決電纜缺陷問題。無人機巡視過程中可發現電纜通道類、電纜主體類、電纜附件三大類缺陷。

圖5:ntree 與標準差
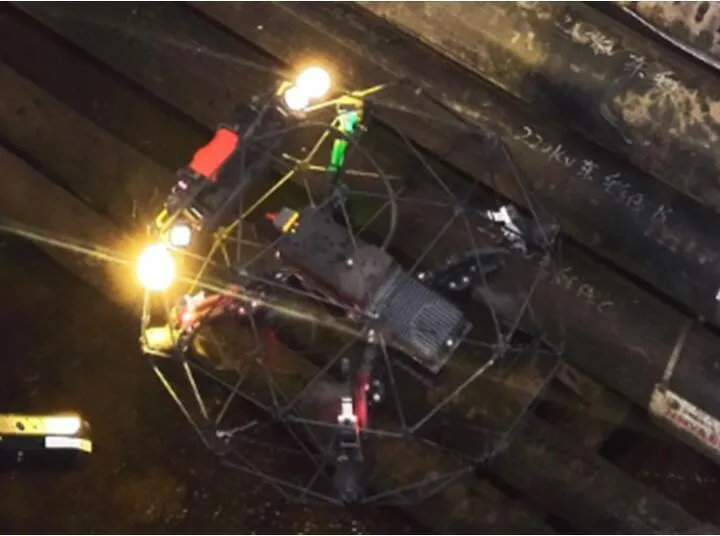
圖6:無人機巡視
3.1 電纜通道缺陷
電纜通道缺陷可以分為功能性缺陷及結構性缺陷兩大類。功能性缺陷指導致管道斷面發生變化,影響暢通性能的缺陷,按照缺陷的嚴重程度可以分為輕微缺陷、中等缺陷、嚴重缺陷、重大缺陷四個級別,結構性缺陷指管道結構本體遭受損傷,影響強度、剛度和使用壽命的缺陷。
該類缺陷采集圖像具有背景灰度值均勻,缺陷區域內的灰度值相似的特征,但各類缺陷的形狀差異較大,適合采用圖像識別缺陷圖像的形狀特征對缺陷進行表征。
3.2 電纜主體缺陷
運行過程中電纜主體缺陷的主要原因為外力破壞或燒蝕。其中電纜主體受損主要原因為電纜敷設過程中施工粗糙,電纜井口墜物使電纜外護套受損,間接導致內部絕緣結構發生變化,嚴重時將導致缺陷部位電場畸變,影響電纜使用壽命,如圖2 所示。因城市建設通道緊張問題,部分電纜線路與通訊光纜或燃氣管道共用通道,當通道內發生火災時,極易燒蝕電纜,導致電纜絕緣失效,發生事故,如圖3 所示。
3.3 電纜附件缺陷

圖7:電纜隧道坍塌原始圖像

圖8:電纜隧道落石

圖9:電纜隧道坍塌分割效果圖
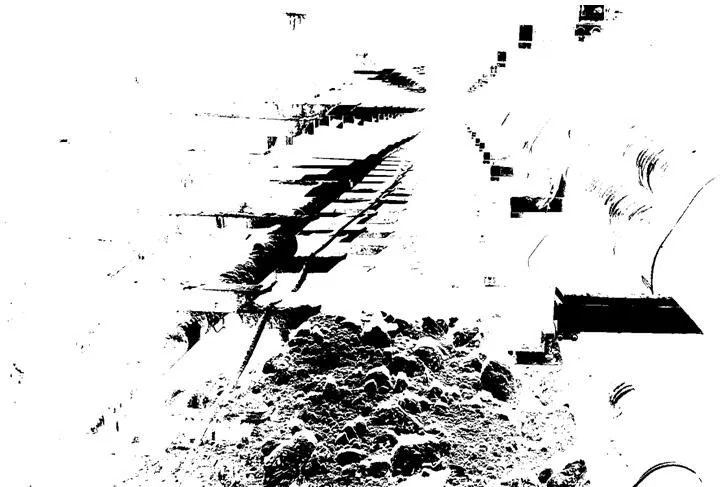
圖10:電纜隧道落石分割效果圖
電纜附件缺陷是電纜運行過程中常見的缺陷,在電纜通道中,以電纜中間接頭缺陷為主。導致電纜中間接頭缺陷的原因包括安裝過程中空環境不符合標準、安裝人員沒有按照規程要求安裝,以及長期運行內部絕緣老化等。
運用無人機搭載的紅外設備,對電纜中間接頭進行紅外圖像采集,可以直觀的看到電纜中間接頭是否符合運行要求,設定2℃的溫差標準[12-15],著重采集不符合標準的紅外熱圖像,如圖4 所示。
4 電纜線路典型缺陷采集
典型缺陷特征提取主要包括缺陷分割、目標區域特征提取兩個步驟。由于管道內壁紋理較復雜,圖像背景灰度值與缺陷灰度值差異小,并且圖像內目標并非完全連通,圖像分割容易出現過分割或欠分割現象,無法準確提取管道缺陷,影響缺陷識別的準確率,采用Otsu 閾值法及Kmeans 聚類的圖像分割法提取電纜線路缺陷。
4.1 缺陷區域分割
由于背景和目標之間灰度差異較小,選擇顏色特征作為聚類分割時的準則。Lab 顏色空間中亮度與顏色信息分開,且色域遼闊,因此在Lab 顏色空間處理圖像。由于電纜線路圖像中內壁部分具有一致性,通過對圖像分塊并提取方差最大的塊,在塊中進行Kmeans 圖像分割能夠提升圖像分割準確性及分割速率,方差最大的塊即包含背景與目標的區域。分塊具體步驟如下:
在Lab 顏色空間的a、b 通道上計算圖像的方差,圖像方差計算公式如(1)所示。

將圖像等分為i2(i=2,3,...)個子塊,分別計算每個子塊的方差σj2(j=1,2,...i2)。分別計算各個子塊方差與圖像方差之間的差值,并選出差值大于圖像方差10%的子塊,若子塊不存在,則令i=i+1,并重新對圖像分塊,直至確定出符合條件的子塊。該子塊則包含電纜線路缺陷與背景。
在選出的子塊中執行Ostu-Kmeans 算法進行圖像分割:在選出的子塊Aj上執行Ostu 閾值法,將其分成Aj1、Aj2兩部分。Ostu 閾值法首先計算整幅圖像的灰度直方圖,假設根據某個閾值T,屬于前景的像素百分比為w1,屬于背景的像素百分比為w2,根據式(2)統計類間方差。

式中,u0、u1分別表示根據閾值劃分出來的兩部分平均灰度值。遍歷尋找最佳閾值,使式(2)類間方差達到最大值。
在Lab 顏色空間的a、b 通道上分別計算Aj1、Aj2中所有點的平均值式(3)。
以ja1、ja2、jb1、jb2作為聚類中心,根據式(4)分別計算每個點到聚類中心的歐氏距離。

式中,Ii_a表示圖像在Lab 顏色空間中a 通道上的像素值,Ii_b表示圖像在b 通道上的像素值。
4.2 區域特征提取
電纜線路缺陷特征提取是缺陷識別的關鍵,由于圖像的背景灰度值均勻,缺陷區域內的灰度值相似,各類缺陷的形狀差異較大,基于選取缺陷圖像的形狀、紅外圖像特征對缺陷進行表征,利用隨機森林算法對上述目標區域進行特征提取,其表達式如表1 所示。
其中:N 為缺陷區域內像素點的個數
由于隨機森林訓練時采用Bootstrap 方法選取樣本,實際上僅有63.2%的樣本被用于訓練,將剩余樣本作為測試樣本。訓練分類器時對子模型數、分裂時參與判斷的最大特征數、葉節點最小樣本數三個參數進行手動調整,引入偏差及方差衡量調參是否已達最優。偏差越小,模型準確率越高,方差越小,模型防止過擬合的能力越強。在通過文中所提取特征訓練分類器時,依次調整子模型數、分裂時參與判斷的最大特征數、葉節點最小樣本數,并分別觀察其對方差及偏差的影響,通過計算發現,當ntree取66 時,如圖5 所示,其標準差最小可滿足識別要求。
4.3 實際應用
采用無人機對220kV 某電纜通道進行了實際巡視驗證,巡視如圖6 所示。
共采集兩處電纜通道實際缺陷,如圖7、8 所示根據式(4)分別計算每個點到聚類中心的歐氏距離。尋找dk的最小值,并據此對圖像進行聚類,聚類完成后圖像即被分割成目標及背景兩部分。
采用上述方法分割缺陷后,當圖像被劃分為9 個子塊時可以得到分割結果,分割效果圖如圖9、10 所示,電纜隧道坍塌后隱患出現在通道正中央,且分割過后可明顯觀察到圖片中央有隱患點。電纜通道落石后,圖片中央存在不連續的目標區域。而通道頂部缺陷則表現為圖片中央偏上方有連續隱患點。由圖可知,分割后障礙物被完整保留,背景信息被剔除,無欠分割或過分割現象,效果理想。
通過無人機巡視,證明電纜通道內采用無人機進行圖像采集,具有效率高、受通道影響小、無人員安全風險等優點,對于無人機巡視作業推廣化應用奠定良好的基礎。
5 結論
運用無人機開展電纜線路巡視工作,可有效克服復雜地形、未知環境給電纜線路巡視帶來的困難,解決有限空間作業所帶來的安全問題。現階段,無人機巡視大多依靠相機、攝影機或紅外感光儀器等設備進行監測,智能化水平不足,但借助無人機懸停、定點拍照功能,實現路徑預規劃,準確獲取電纜通道、本體、附件的紅外和可見光典型缺陷圖庫。通過融合圖像分割、特征提取、模式識別等技術,降低了后期圖像處理工作量,提升了巡視效率,為推進無人機巡視實用化奠定良好的基礎。

表1:特征名稱及表達式
開展電纜線路無人機智能巡視,應當加強以下幾方面研究:制定電纜線路無人機巡視操作規范、圖像采集等相關標準;開展電纜隧道用無人機構造研究,改進防護網、旋翼、電池及機身構造;結合現有智能巡視技術,開展“人工+軌道機器人+無人機”綜合巡視技術研究。隨著無人機路徑規劃、智能故障診斷及預測技術的發展,移動智能巡視技術將進一步提高巡視質量,提升電力電纜精益化管理水平。
猜你喜歡
艦船科學技術(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動化學報(2017年7期)2017-04-18 13:41:09
自動化學報(2017年11期)2017-04-04 02:52:58
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
計算機工程(2015年4期)2015-07-05 08:28:02
機電信息(2015年3期)2015-02-27 15:54:46
機械工程師(2015年10期)2015-02-02 01:13:49
