少齒數(shù)弧齒錐齒輪節(jié)錐外嚙合的變位設(shè)計(jì)與試驗(yàn)
2021-06-16 01:34:10郭玉梁魏冰陽曹雪梅
張 柯,郭玉梁,魏冰陽,曹雪梅
(河南科技大學(xué) 機(jī)電工程學(xué)院,河南 洛陽 471003)
0 引言
近年來,機(jī)械傳動(dòng)裝備朝著輕量化高功率密度方向發(fā)展,少齒數(shù)齒輪副具有傳動(dòng)比大、體積小、結(jié)構(gòu)緊湊的優(yōu)點(diǎn),在航空航天、電驅(qū)動(dòng)、角矢量傳動(dòng)領(lǐng)域具有獨(dú)特的優(yōu)勢(shì)。節(jié)點(diǎn)外嚙合能夠大幅度提高小輪的體積,平衡大小輪強(qiáng)度,同時(shí)由于嚙合過程中摩擦力不換向,對(duì)降低齒輪傳動(dòng)的振動(dòng)和噪聲有利。因此,節(jié)點(diǎn)外嚙合在少齒數(shù)漸開線圓柱齒輪設(shè)計(jì)方面得以應(yīng)用。文獻(xiàn)[1]研究了少齒數(shù)齒輪軸齒根彎曲應(yīng)力計(jì)算方法,為少齒數(shù)齒輪軸的安全性測(cè)定提供了依據(jù)。文獻(xiàn)[2]提出了一種便于調(diào)整的齒廓曲線構(gòu)造方法,有效提高了少齒數(shù)齒輪的承載能力。文獻(xiàn)[3-4]研究了少齒數(shù)齒輪副徑向變位和切向變位系數(shù)的選取方法。文獻(xiàn)[5-7]對(duì)節(jié)點(diǎn)外嚙合齒輪的動(dòng)力學(xué)特性進(jìn)行了分析和試驗(yàn)驗(yàn)證。文獻(xiàn)[8]對(duì)節(jié)點(diǎn)外嚙合出現(xiàn)的原因進(jìn)行了分析,總結(jié)了節(jié)點(diǎn)外嚙合對(duì)齒輪強(qiáng)度的影響。上述研究均集中在少齒數(shù)漸開線圓柱齒輪設(shè)計(jì)方面。文獻(xiàn)[9]分析了現(xiàn)有膠合承載能力計(jì)算中平均摩擦因數(shù)計(jì)算方法的不足,根據(jù)節(jié)點(diǎn)外嚙合齒輪傳動(dòng)的嚙合特點(diǎn),提出了一種更為合理且精度較高的平均摩擦因數(shù)計(jì)算方法。文獻(xiàn)[10]從輪齒的接觸強(qiáng)度、彎曲強(qiáng)度、磨損、振動(dòng)和潤(rùn)滑等方面,對(duì)節(jié)點(diǎn)外嚙合齒輪傳動(dòng)進(jìn)行了討論,并指出在大傳動(dòng)比情況下采用這種齒輪傳動(dòng)有很多優(yōu)點(diǎn)。在錐齒輪設(shè)計(jì)方面,文獻(xiàn)[11]提出了非零變位設(shè)計(jì)方法,能夠?qū)崿F(xiàn)齒數(shù)和較少的小型傳動(dòng)。文獻(xiàn)[12-14]對(duì)少齒數(shù)高減比準(zhǔn)雙曲面齒輪副的幾何參數(shù)選取、加工參數(shù)計(jì)算進(jìn)行了研究,通過切齒試驗(yàn)驗(yàn)證了其設(shè)計(jì)的可行性。文獻(xiàn)[15]利用曲面綜合法,對(duì)錐齒輪的加工參數(shù)進(jìn)行了計(jì)算,實(shí)現(xiàn)了對(duì)齒輪副接觸性能的主動(dòng)控制。文獻(xiàn)[16]對(duì)弧齒錐齒輪的齒面幾何傳動(dòng)誤差進(jìn)行了研究,分析了幾何傳動(dòng)誤差對(duì)弧齒錐齒輪承載和振動(dòng)特性的影響。為了更加真實(shí)地反映齒輪齒根彎曲強(qiáng)度,文獻(xiàn)[17]推導(dǎo)了齒根過渡曲面方程,構(gòu)建了齒輪的齒根過渡曲面。
節(jié)錐外嚙合可以顯著地增加小輪的體積,減小大輪的體積,有利于均衡大傳動(dòng)比齒輪副的彎曲強(qiáng)度,解決大速比齒輪副承載能力弱的問題。同時(shí),節(jié)錐外嚙合還具有摩擦力不換向的優(yōu)點(diǎn),能有效地降低齒輪傳動(dòng)系統(tǒng)的振動(dòng)和噪聲。但節(jié)點(diǎn)外嚙合應(yīng)用于弧齒錐齒輪上尚未見文獻(xiàn)報(bào)道,鑒于此,本文基于錐齒輪的綜合變位原理,提出了節(jié)錐外嚙合弧齒錐齒輪幾何變位設(shè)計(jì)方法。根據(jù)等彎曲強(qiáng)度原則,給出了一對(duì)齒數(shù)比4∶41的弧齒錐齒輪幾何設(shè)計(jì)參數(shù),進(jìn)行了三維建模仿真,通過切齒和滾檢試驗(yàn)驗(yàn)證了本文所提出的節(jié)錐外嚙合錐齒輪設(shè)計(jì)方法的可行性。
1 少齒數(shù)弧齒錐齒輪變位設(shè)計(jì)原理
根據(jù)錐齒輪綜合變位原理,小輪需采用徑向與切向正變位設(shè)計(jì),以提高小輪的彎曲強(qiáng)度,使大小輪的強(qiáng)度近似平衡,節(jié)錐外嚙合則通過大變位實(shí)現(xiàn)。下面以中點(diǎn)端面當(dāng)量齒輪為依據(jù),給出少齒數(shù)弧齒錐齒輪變位設(shè)計(jì)原理與幾何限制條件。
從變位后的節(jié)錐相對(duì)位置來看,節(jié)錐外嚙合分以下兩種情況:節(jié)錐前嚙合和節(jié)錐后嚙合。
1.1 節(jié)錐前嚙合
節(jié)錐前嚙合示意圖如圖1所示,N1N2為理論嚙合線,B1B2為實(shí)際嚙合線,P為節(jié)點(diǎn),即實(shí)際嚙合線位于節(jié)點(diǎn)之前。rva1、rva2分別為小輪和大輪的當(dāng)量齒輪頂圓直徑,rvb1、rvb2分別為小輪和大輪當(dāng)量齒輪基圓直徑。具體到錐齒輪,則小輪的面錐在節(jié)錐之內(nèi),對(duì)應(yīng)大輪的節(jié)錐靠近根錐,小輪的齒頂高演變?yōu)樨?fù)值。該設(shè)計(jì)導(dǎo)致小輪徑向較大的負(fù)變位,體積減小,大輪的體積反而增大,不利于均衡大小輪的彎曲強(qiáng)度,承載能力提高,所以較少采用。

圖1 節(jié)錐前嚙合示意圖
1.2 節(jié)錐后嚙合
節(jié)錐后嚙合即實(shí)際嚙合線位于節(jié)點(diǎn)之后,節(jié)錐后嚙合示意圖如圖2所示,節(jié)錐后嚙合要求小輪徑向采用較大的正變位,大輪負(fù)變位。從錐齒輪的幾何看,此時(shí)從動(dòng)輪大輪的節(jié)錐在其面錐之外,對(duì)應(yīng)小輪根錐靠近節(jié)錐,大輪的齒頂高演變?yōu)樨?fù)值。
由于節(jié)錐后嚙合使得小輪的體積顯著增大,且有利于提高齒輪副的接觸強(qiáng)度和承載能力,所以對(duì)于大傳動(dòng)比、少齒數(shù)弧齒錐齒輪設(shè)計(jì),采用節(jié)錐后嚙合方式[18]。
為了衡量節(jié)點(diǎn)外嚙合的程度,引入節(jié)點(diǎn)外嚙合系數(shù)λ[7]:
(1)
其中:rv2為大輪的當(dāng)量節(jié)圓直徑,mm;mmt為中點(diǎn)處的端面模數(shù),mm。
對(duì)于錐齒輪節(jié)錐后嚙合則應(yīng)滿足[11]:
(2)

2 節(jié)錐外嚙合變位設(shè)計(jì)的幾何約束條件
2.1 齒頂厚限制
小輪較大的正變位,容易導(dǎo)致齒頂變尖;大輪采用切向負(fù)變位,也存在齒頂變尖的可能,所以對(duì)大輪和小輪的齒頂厚進(jìn)行驗(yàn)算。小輪與大輪的齒頂厚計(jì)算公式[19]分別為:
(3)
其中:smn2=0.5pmcosβ-(ham1-ham2)tanαn-kt1mmn;smn1=pmcosβ-smn2;mmn為中點(diǎn)法向模數(shù),mm;pm為中點(diǎn)分度圓齒距,mm;kt1為小輪切向變位系數(shù),αvt為端面當(dāng)量壓力角,(°);αavt1和αavt2為端面頂圓壓力角,(°)。
2.2 根切限制
齒數(shù)太少、變位系數(shù)取值不當(dāng)都可能產(chǎn)生根切,因此大小輪的徑向變位系數(shù)應(yīng)滿足[19]:
(4)
其中:zv1和zv2為當(dāng)量齒數(shù)。
2.3 最小重合度限制
為了保證齒輪傳動(dòng)的連續(xù)性和平穩(wěn)性,齒輪傳動(dòng)需要滿足一定的重疊系數(shù)要求。對(duì)于直齒輪,要求重合度大于1.0,由于弧齒錐齒輪具有端面和軸向重合度,總重合度需滿足[11]:
(5)

3 輪齒幾何參數(shù)設(shè)計(jì)
預(yù)先給定齒輪的基本參數(shù):齒數(shù)z1=4,z2=41,大端模數(shù)met=4.5 mm,法向壓力角αn=20°,軸交角∑=90°。基于1.1小節(jié)至1.4小節(jié)所述的限制條件,在其可行域內(nèi)選取輪齒的幾何參數(shù)。以文獻(xiàn)[11]為依據(jù)編制計(jì)算程序,所設(shè)計(jì)的輪齒幾何參數(shù)如表1所示。節(jié)錐外嚙合系數(shù)λ=-0.02。以大輪的幾何看,變位后節(jié)錐已位于面錐之外,本文采用等高弧線齒錐齒輪型式設(shè)計(jì),節(jié)錐、面錐、根錐三者角度相等。

表1 輪齒幾何參數(shù)
4 三維建模與彎曲強(qiáng)度仿真
4.1 齒輪副共軛三維模型
當(dāng)齒數(shù)比超過3.73時(shí),大輪的節(jié)錐角大于75°,大輪可以采用成形法加工,因此針對(duì)表1的參數(shù),大輪利用成形法建立模型。將大輪的刀具面離散為點(diǎn)云,刀具面點(diǎn)云通過坐標(biāo)變換矩陣,變換入大輪坐標(biāo)系即可得到大輪齒面的點(diǎn)云坐標(biāo)[15]。根據(jù)齒輪嚙合原理,共軛小輪的齒面點(diǎn)云可由嚙合方程和大輪齒面點(diǎn)云求得[15]。將點(diǎn)云文件導(dǎo)入U(xiǎn)G軟件中,再結(jié)合其他指令可以建立大小輪的精確三維模型,如圖3所示。

圖3 齒數(shù)比4∶41的齒輪副三維模型
在三維軟件UG中利用分析指令,測(cè)得三維模型的大小輪中點(diǎn)處齒高為5.845 mm,與表1的理論計(jì)算結(jié)果的誤差為0;小輪中點(diǎn)處齒頂厚為1.880 mm,與表1的理論計(jì)算結(jié)果的誤差為0.66%;大輪中點(diǎn)處齒頂厚為2.953 mm,與表1的理論計(jì)算結(jié)果的誤差為0.43%,輪齒形狀符合2.1小節(jié)至2.3小節(jié)的約束條件。
4.2 齒輪副彎曲應(yīng)力仿真
少齒數(shù)齒輪模型相對(duì)于常規(guī)弧齒錐齒輪模型更加復(fù)雜,制定齒輪副的切分方案十分重要,在UG中提前將大小輪的三維模型按已定方案進(jìn)行切分,使得大小輪能劃分成六面體網(wǎng)格單元,以便提高有限元的求解精度。將切分后的模型導(dǎo)入有限元軟件Ansys workbench中,對(duì)小輪施加50 N·m的扭矩;并對(duì)其添加cycle support約束,僅釋放其切向自由度;大輪采用fixed support約束;將接觸對(duì)類型設(shè)置為frictional,其系數(shù)為0.03,參數(shù)設(shè)置完畢后對(duì)齒輪副的齒根彎曲應(yīng)力進(jìn)行靜力學(xué)仿真。仿真方案采用以小輪的一個(gè)齒從嚙入到嚙出為仿真區(qū)間,以小輪每轉(zhuǎn)過10°為步長(zhǎng),對(duì)齒輪副進(jìn)行靜力學(xué)仿真。按照設(shè)計(jì)的仿真方案,在一對(duì)齒從嚙入到嚙出的仿真區(qū)間里,每增加一個(gè)步長(zhǎng),對(duì)齒輪副的齒根彎曲應(yīng)力進(jìn)行一次靜力學(xué)仿真,并記錄該次仿真下大小輪的齒根彎曲應(yīng)力最大值。本文在仿真區(qū)間里對(duì)齒輪副13個(gè)不同的齒根位置進(jìn)行了齒根彎曲應(yīng)力仿真,仿真結(jié)果可繪制為如圖4所示的折線圖。
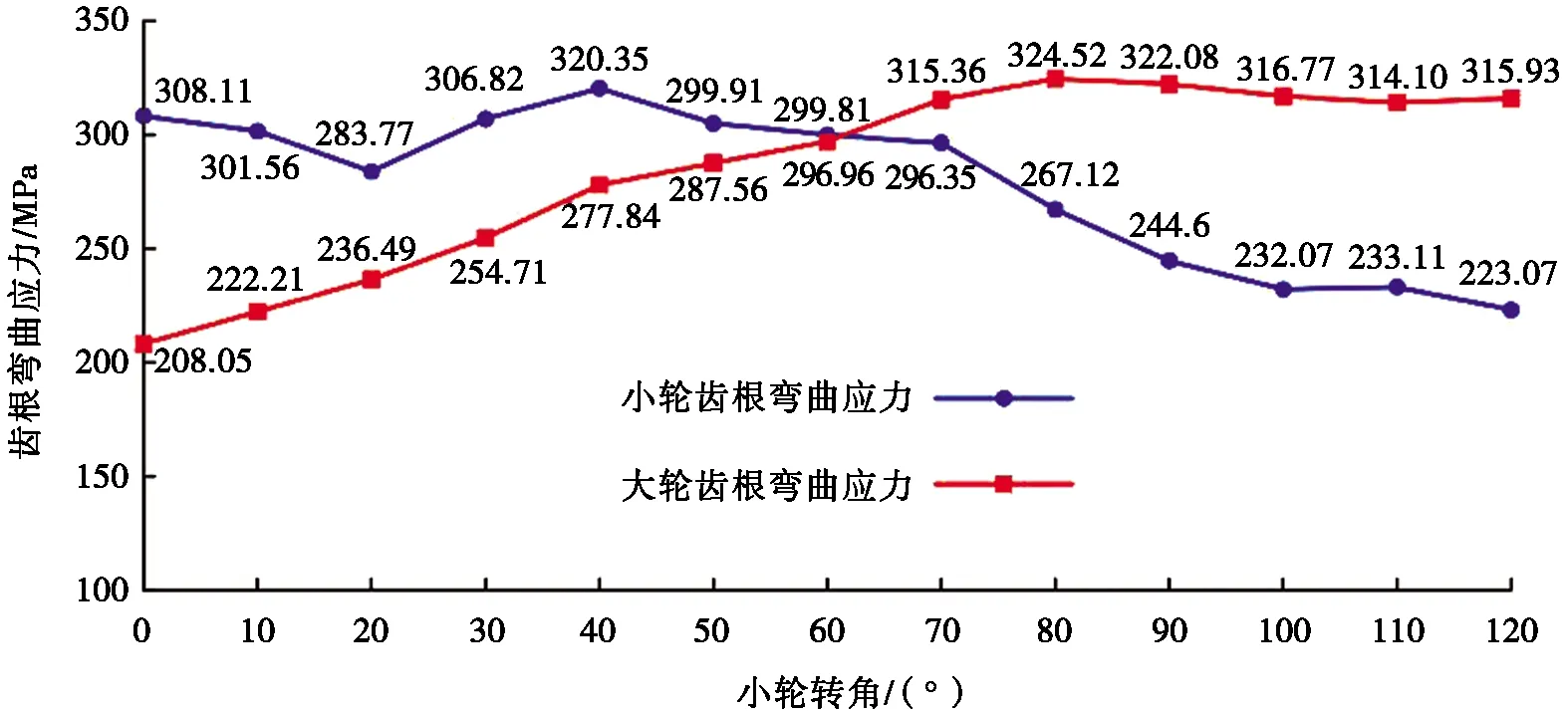
圖4 大小輪齒根彎曲應(yīng)力折線圖
由圖4可以看出:在一對(duì)齒從嚙入到嚙出的仿真區(qū)間里,小輪的齒根彎曲應(yīng)力最大值為320.35 MPa,大輪的齒根彎曲應(yīng)力最大值為324.52 MPa。
4.3 齒輪副的等彎強(qiáng)驗(yàn)證
以文獻(xiàn)[20]中試驗(yàn)得出的極限彎曲應(yīng)力為依據(jù),大小輪的計(jì)算許用彎曲應(yīng)力為:
(6)
其中:YNT1,2為小輪和大輪的壽命因數(shù);SF1,2為小輪和大輪的設(shè)計(jì)強(qiáng)度安全因數(shù);Kθ1,2為小輪和大輪的溫度因數(shù);YZ1,2為小輪和大輪的可靠性因數(shù);σFlim為齒輪的極限彎曲應(yīng)力,MPa。
齒根的彎曲強(qiáng)度可由許用彎曲應(yīng)力與齒根彎曲應(yīng)力的比值來衡量,分別取仿真中大小輪齒根彎曲應(yīng)力的最大值來計(jì)算其對(duì)應(yīng)的安全因數(shù),大小輪安全因數(shù)計(jì)算公式為:
(7)
其中:σF1,2max為小輪和大輪的齒根彎曲應(yīng)力最大值,MPa。
安全因數(shù)大于1.0為滿足強(qiáng)度要求,安全因數(shù)差小于0.1為滿足等強(qiáng)度設(shè)計(jì)依據(jù)。大小輪許用彎曲應(yīng)力計(jì)算評(píng)價(jià)如表2所示。

表2 許用彎曲應(yīng)力計(jì)算評(píng)價(jià)
由表2可得大小輪安全因數(shù)為:
S1,2>1.0,
(8)
大小輪安全因數(shù)之差為:
Sc=|S1-S2|=0.037<0.1。
(9)
經(jīng)驗(yàn)算,大小輪的安全因數(shù)差滿足設(shè)計(jì)要求,可以認(rèn)為所設(shè)計(jì)的大小輪的彎曲強(qiáng)度近似平衡。
4.4 瞬時(shí)接觸斑點(diǎn)仿真
小輪采用展成法加工,加工參數(shù)計(jì)算方法參見文獻(xiàn)[15]。在UG軟件中,建立小輪修形后的三維模型,并將大輪和修形小輪進(jìn)行裝配,利用運(yùn)動(dòng)仿真模塊,對(duì)齒輪副進(jìn)行運(yùn)動(dòng)學(xué)仿真,可觀察到齒輪副任意嚙合位置的瞬時(shí)接觸區(qū)。圖5顯示的是齒面中點(diǎn)位置的瞬時(shí)接觸區(qū),其形狀呈標(biāo)準(zhǔn)的橢圓形,符合錐齒輪修形后的局部共軛特性。
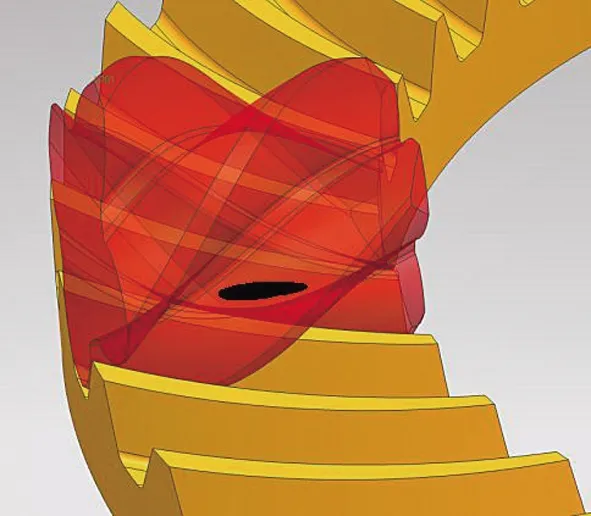
圖5 齒面中點(diǎn)位置瞬時(shí)接觸區(qū)
5 輪齒的切齒試驗(yàn)
為進(jìn)一步檢驗(yàn)本文所提設(shè)計(jì)方法的可行性,在半數(shù)控GH-35機(jī)床上完成了切齒加工。大輪節(jié)錐角為84.427 8°,采用成形法加工,小輪采用展成法加工,大輪和小輪的加工參數(shù)見表3。
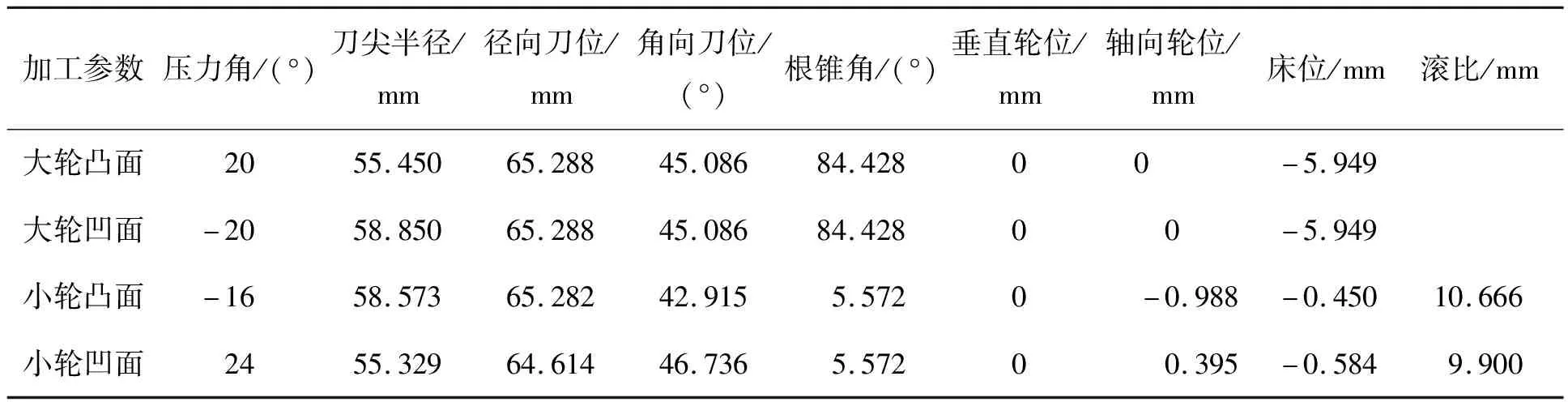
表3 大輪和小輪加工參數(shù)
大輪采用成形法加工,加工參數(shù)由幾何參數(shù)計(jì)算求得;小輪的加工參數(shù)是利用曲面綜合法,編制程序優(yōu)化求解[15]。
大小輪的切齒及配齒過程如圖6a和圖6b所示。大輪分3次切到深度,最后光整一刀,確保齒面的光潔度。小輪采用展成法單面加工,對(duì)凸凹面分別修正,在控制輪齒尺寸公差的同時(shí),接觸區(qū)應(yīng)符合設(shè)計(jì)要求。
切齒結(jié)束后在滾檢機(jī)上進(jìn)行配齒,如圖6c所示,觀察大小輪的齒形無畸變。

(a) 小輪切齒
在滾檢機(jī)上對(duì)所加工的齒輪副進(jìn)行滾檢試驗(yàn),齒數(shù)比4∶41的弧齒錐齒輪副滾檢結(jié)果如圖7所示,圖7b為齒面接觸區(qū)拓印圖,底部為齒根,上部為齒頂。
由圖7可以看出:大輪凸面接觸斑點(diǎn)呈內(nèi)對(duì)角橢圓形,長(zhǎng)度占齒寬的45%,寬度占工作齒高的70%,位置略靠小端。完全符合設(shè)計(jì)要求。
6 結(jié)束語
利用錐齒輪的綜合變位和節(jié)錐外嚙合原理,給出了高減速比、少齒數(shù)弧齒錐齒輪變位系數(shù)選取與幾何約束條件。以齒數(shù)比4∶41的等高弧齒錐齒輪為例,選取了節(jié)點(diǎn)外嚙合系數(shù),對(duì)齒輪副的幾何參數(shù)進(jìn)行了校驗(yàn)。建立了精確的輪齒三維模型,進(jìn)行了接觸斑點(diǎn)仿真與彎曲強(qiáng)度平衡校驗(yàn)。在幾何設(shè)計(jì)上保證了輪齒幾何無畸變,大小輪彎曲強(qiáng)度近似平衡。切齒和滾檢試驗(yàn)證明了節(jié)錐外嚙合在高減比少齒數(shù)弧齒錐齒輪設(shè)計(jì)方面應(yīng)用的可行性,為節(jié)錐外嚙合在弧齒錐齒輪上的應(yīng)用奠定了基礎(chǔ),也為高減比弧齒錐齒輪的設(shè)計(jì)提供了思路。