模塊化雙作用水壓人工肌肉關節設計
2021-06-16 00:27:08車進凱張增猛陳圣濤弓永軍
液壓與氣動 2021年6期
關鍵詞:設計
車進凱,張增猛,陳圣濤,弓永軍
(大連海事大學 船舶與海洋工程學院,遼寧 大連 116026)
引言
水下機械臂是水下機器人探索開發海洋資源的核心部分。因此,迫切需要開發出結構緊湊,擁有大范圍運動空間且適用于水下機械臂的關節[1-2]。現有水下機械臂驅動方式包括液壓驅動與電機驅動[3-4]。近年來,流體人工肌肉作為一種新型驅動器,廣泛應用于醫療機械領域,其中氣動人工肌肉工作壓力一般不超過1 MPa、輸出力較小,因此,利用氣動人工肌肉驅動機械臂的輸出轉矩較小[5];另一種流體人工肌肉為水壓人工肌肉,其輸出重量比大,且不會污染環境。水壓人工肌肉工作時動作平滑,無相對摩擦的運動部件[6]。相比液壓缸、液壓馬達,水壓人工肌肉驅動的水下機械臂重量和體積可以大大減小,結構更加靈活。與氣動人工肌肉相比,水壓人工肌肉具有輸出重量比大、響應速度快等優點。利用水壓人工肌肉驅動關節,可以在對關節進行緊湊性設計的同時,保證足夠的輸出轉矩。MORITA[7]團隊研發出由液壓人工肌肉驅動的旋轉關節,同時驗證了該關節的能量密度為液壓缸驅動關節的2倍。然而,MORITA團隊研發的關節為單自由度關節,MIRO等[8]研發利用水壓人工肌肉驅動的機械手,每根手指都有1個五連桿關節機構,可以抓取直徑為300 mm,重量為45 kg的圓柱體。ZHANG等[9-11]研制了高強度水壓人工肌肉關節,由于水壓人工肌肉輸出力可達到20 kN,所以采用直徑為8 mm的鋼絲繩作為傳動絲。實驗結果表明,由于鋼絲繩剛度過大,導致實際關節旋轉角度小于理論值。因此,需要設計出適用于水壓人工肌肉關節的傳動裝置,使其能夠承受水壓人工肌肉的輸出力,保證傳動絲的柔韌性,便于關節的輕小型化設計。此外,現有水壓人工肌肉關節設計缺乏模塊化理念,不利于關節的擴展。因此,需要對水壓人工肌肉關節的液壓管路、電氣通道及關節串聯機械接口進行模塊化設計。
為充分利用水壓人工肌肉高輸出重量比的優勢,采用滑輪組與關節輪相結合的方式,放大水壓人工肌肉的有效行程并降低傳動絲的載荷。設計傳動絲的連接結構及空間布局,使水壓人工肌肉關節盡可能的輕小型化。設計模塊化雙作用水壓人工肌肉關節,便于串聯關節的擴展,為研發高性能水下作業機械臂奠定基礎。
1 雙作用水壓人工肌肉關節傳動裝置
動滑輪實質為動力臂等于2倍阻力臂的杠桿。因此,水壓人工肌肉關節采用滑輪組進行傳動,如圖1所示。滑輪組中的動滑輪與水壓人工肌肉相連,水壓人工肌肉收縮,帶動動滑輪移動。通過滑輪組傳動,降低傳動絲載荷,充分利用了水壓人工肌肉輸出重量比大的優勢,而且,傳動絲末端移動距離為動滑輪移動距離的2倍,因此,滑輪組傳動還放大了水壓人工肌肉的有效行程,使得關節擁有大范圍運動空間及高輸出轉矩。

1.關節輪 2. 1號傳動裝置 3. 2號傳動裝置4. 1號水壓人工肌肉 5. 2號水壓人工肌肉圖1 滑輪組與關節輪相結合的水壓人工肌肉關節
滑輪組可以采用多種組合方式,包括N個動滑輪和M個定滑輪,其中,M=N或M=N-1。擁有單個動滑輪的傳動裝置可以將水壓人工肌肉的行程放大2倍,則關節轉角所對應的弧長為水壓人工肌肉收縮量的2倍;擁有2個滑輪的傳動裝置,如圖2所示,可以將水壓人工肌肉的行程放大3倍,則關節轉角所對應的弧長為水壓人工肌肉收縮量的3倍;擁有3個滑輪的傳動裝置可以將水壓人工肌肉的的行程放大4倍,則關節轉角所對應的弧長為水壓人工肌肉收縮量的4倍。以此類推,擁有N個動滑輪和M個定滑輪的傳動裝置可以將水壓人工肌肉的行程放大(N+M+1)倍,則關節轉角所對應的弧長為水壓人工肌肉收縮量的(N+M+1)倍。
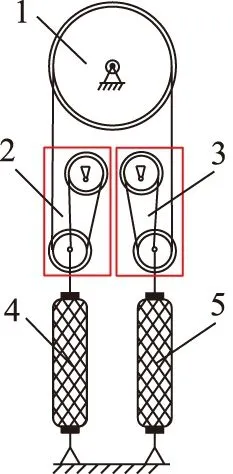
1.關節輪 2. 1號傳動裝置 3. 2號傳動裝置4. 1號水壓人工肌肉 5. 2號水壓人工肌肉圖2 傳動裝置擁有2個滑輪的水壓人工肌肉關節
2 雙作用水壓人工肌肉關節轉角特性
水壓人工肌肉輸出力特性公式為:
(1)
其中,k1,k2為修正系數,設計階段可先令k1=k2=1,r0為肌肉半徑,p為充水壓力,a,b為常數,ε為肌肉收縮率。根據前期水壓人工肌肉輸出特性試驗,選擇肌肉初始編織角α0=25°,最大收縮率為0.36。傳動裝置中擁有N個動滑輪和M個定滑輪,則水壓人工肌肉相對初始位置的長度變化量x與關節轉角所對應弧長larc的關系為x=larc/(N+M+1),其中larc=Rθ,R為關節輪回轉半徑,θ為關節轉角。根據鋼絲繩選型公式:
(2)
式中,d為最小直徑;S為最大靜載荷;C為選擇系數。
(3)
其中,n為安全系數;k為折減系數;ω為充滿系數;σ為公稱抗拉強度;采用滑輪組傳動,可以降低傳動絲的傳遞載荷。
F=(N+M+1)S
(4)
通過計算可得,當N=1,M=0時,鋼絲繩直徑不超過5 mm,滿足關節強度與柔韌性設計要求。設計水壓人工肌肉關節回轉半徑為R=40 mm,水壓人工肌肉的原長l0=300 mm。現有機械臂輸出轉矩約為100 Nm,因此,設計關節輸出轉矩為100 Nm,結合水壓人工肌肉輸出力特性公式 (1)可確定水壓人工肌肉半徑為30 mm。
關節回轉過程中,1號肌肉的收縮率與充水壓力分別為ε1=ε0-x/L1,p1=p0-Δp;2號肌肉的收縮率與充水壓力分別為ε2=ε0+x/L2,p2=p0+Δp。其中,ε0為水壓人工肌肉的初始收縮率。L1,L2分別為1,2號人工肌肉的初始原長;p0為2根肌肉的初始壓力;Δp為2根肌肉相對于初始壓力的壓力變化量。根據水壓人工肌肉輸出力特性公式,關節輸出轉矩可表示為:
(5)
其中,F1為1號水壓人工肌肉輸出力,F2為2號水壓人工肌肉輸出力。初始狀態下,系統無負載,關節輸出轉矩T=0,關節轉角θ與壓力變化量Δp之間的關系為:
(6)
根據關節轉角范圍、輸出力矩及鋼絲繩選型,取N=1,M=0,利用MATLAB繪制出關節轉角θ與壓力變化量Δp的關系曲線,如圖3所示。
根據式(4)和圖3可知,在最大收縮量范圍內,相同壓力變化下,初始收縮率ε0越小,關節轉角越大。同樣,在相同初始收縮率下,初始壓力p0越小,關節轉角越大。

圖3 關節轉角θ與壓力變化量Δp的關系曲線
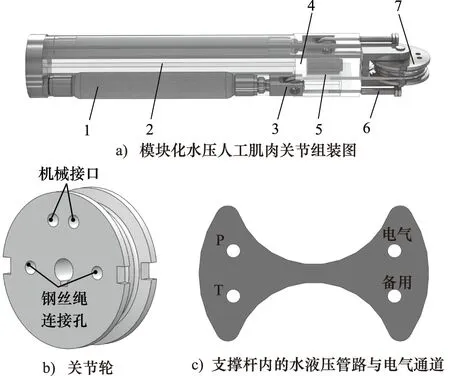
1.水壓人工肌肉 2.支撐桿 3.傳動裝置4.耐壓殼 5.水液壓閥組 6.收緊裝置 7.關節輪圖4 模塊化水壓人工肌肉關節
3 模塊化設計雙作用水壓人工肌肉關節
模塊化水壓人工肌肉關節包括關節輪、傳動裝置、收緊裝置、水液壓閥組、耐壓殼、支撐桿和水壓人工肌肉,如圖4a所示。關節輪上設計2個線槽,為傳動絲導向,傳動絲跨過關節輪的1/2弧面,端部與鋼絲繩連接孔利用銷軸固定,關節輪的機械接口可實現模塊化設計,如圖4b所示。關節輪外徑為46 mm,鋼絲繩中心的回轉半徑為40 mm。向水壓人工肌肉充水加壓,人工肌肉徑向膨脹,軸向收縮,產生收縮力。利用拮抗原理驅動關節輪轉動的2根水壓人工肌肉在初始工作狀態下都具有初始收縮量。如果在初始工作狀態下,人工肌肉處于原長,就不能驅動關節轉動。因此,在設計階段,確定水壓人工肌肉的初始收縮量與傳動絲的長度,使得在初始工作狀態下,傳動絲處于張緊狀態。模塊化關節所采用的水壓人工肌肉最大收縮率為0.36,在初始工作狀態時,水壓人工肌肉的收縮率為0.15。在非工作狀態下,水壓人工肌肉處于原長狀態,傳動絲并未張緊,具有45 mm的余量,導致關節系統松散。因此,設計傳動絲收緊裝置,在非工作狀態下,利用彈簧張緊傳動絲,傳動絲收緊裝置中的彈簧長為60 mm。水壓人工肌肉與滑輪組安裝在機架與耐壓殼之間,傳動絲穿過耐壓殼,繞過滑輪組,端部與收緊裝置連接。在支撐桿內部設計水液壓管路與電氣通道,如圖4c所示。在耐壓殼內設計傳動裝置的活動空間,有助于水壓人工肌肉關節的緊湊性設計。關節總長為590 mm,最大橫截面直徑為100 mm。
4 強度校核
根據關節設計轉角范圍、輸出轉矩以及水壓人工肌肉輸出特性試驗,選用初始長度為300 mm、初始編織角為25°、橡膠管外徑為30 mm,壁厚為2 mm的水壓人工肌肉。利用水壓人工肌肉輸出特性試驗臺測試肌肉輸出特性,如圖5所示。該試驗測試系統包括動力源、數據采集單元、壓力控制單元和安裝平臺。通過芬蘭某公司制造的水液壓綜合性試驗臺提供壓力。由手動單向節流閥和水液壓比例節流閥組成的B型半橋回路為壓力控制單元,調節水壓人工肌肉的工作壓力。安裝平臺上端是花籃螺栓,用于調節肌肉的收縮量;下端連接拉力傳感器和拉線位移傳感器,記錄試驗中肌肉的收縮位移情況。水壓肌肉輸出特性曲線如圖6所示,在壓力一定時,收縮量越大,肌肉輸出力越小,且隨著收縮量增大,肌肉輸出力變化量越小,即特性曲線斜率越小。此外,水壓人工肌肉輸出特性試驗曲線并未經過原點,證明試驗系統存在背壓pb=0.4 MPa。
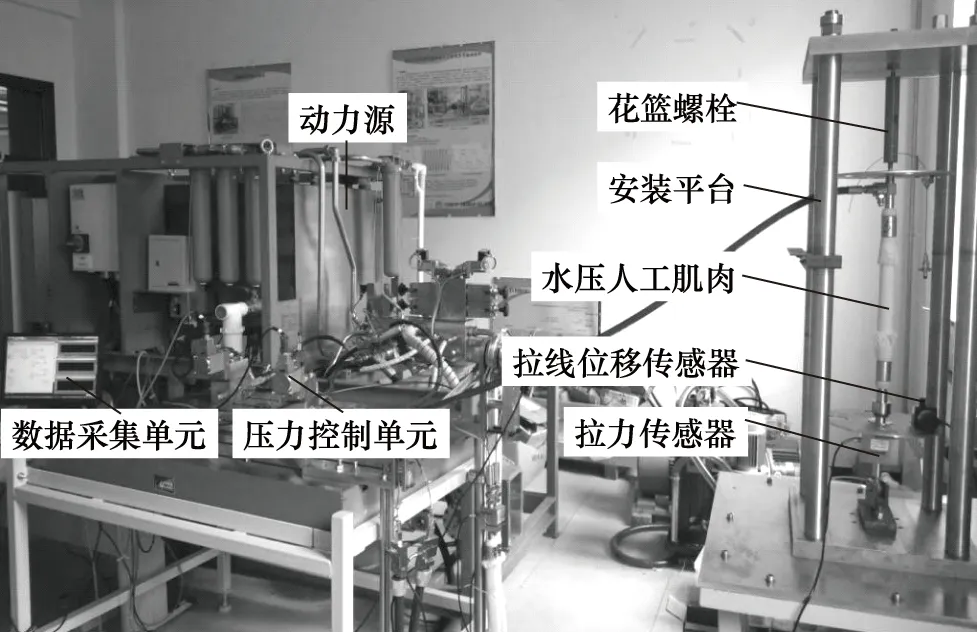
圖5 水壓人工肌肉輸出特性試驗臺

圖6 水壓人工肌肉輸出力特性曲線
水壓人工肌肉破壞試驗表明,同樣參數的水壓人工肌肉可承受的最大充水壓力約為7.6 MPa。取安全系數為1.5,則在驅動關節回轉時,水壓人工肌肉的最大充水壓力pmax<4 MPa。根據對稱控制原理,水壓人工肌肉初始壓力p0=(pmax+pb)/2。此外,由于系統背壓,在驅動關節回轉時,水壓人工肌肉不可能恢復至原長狀態,而且,當一側水壓人工肌肉收縮量增大到70 mm時,即使繼續增大充水壓力也不能對抗另一側低充水壓力、低收縮量人工肌肉的輸出力。因此,水壓人工肌肉驅動關節回轉的有效行程為10~60 mm。根據水壓人工肌肉特性試驗可得,關節極限狀態下,2根水壓人工肌肉的輸出力分別為19112 N和650 N。支撐桿所受外力為2根水壓人工肌肉輸出力之和,即19762 N。根據支撐桿所受外力及邊界約束進行強度校核,水液壓管路及電氣通道直徑為8 mm的支撐桿強度校核結果如圖7所示,最大應力為10.96 MPa。水液壓管路及電氣通道直徑為20 mm的支撐桿強度校核結果如圖8所示,最大應力為14.86 MPa。根據圖7和圖8可知,水液壓管路及電氣通道直徑由8 mm擴大至20 mm后,支撐桿的強度仍然滿足要求,因此,在后期設計中可以滿足不同直徑通道的需求。在采用較小通道時,可以對支撐桿進行輕量化設計。

圖7 通道直徑為8 mm的支撐桿強度校核結果
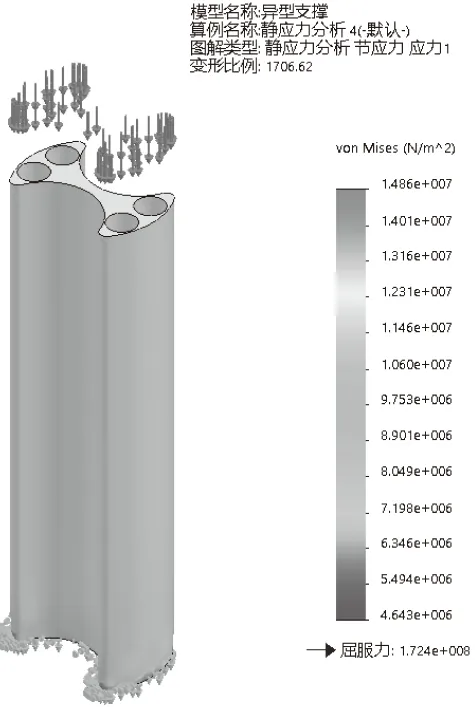
圖8 通道直徑為20 mm的支撐桿強度校核結果
5 結論
利用滑輪組傳動,設計了模塊化雙作用水壓人工肌肉關節,放大水壓人工肌肉的有效行程并降低傳動絲的載荷。設計傳動絲收緊裝置,解決了在非工作狀態下,傳動絲松弛的問題。采用異型支撐結構,充分利用關節空間,并將水液壓管路和電氣通道設計在支撐桿內部,實現關節的緊湊性設計。關節輪上設計模塊化機械接口,便于關節的串聯擴展。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
