大型裝備電液系統(tǒng)高精度魯棒位置控制
2021-06-16 00:27:10許文斌
液壓與氣動 2021年6期
關(guān)鍵詞:系統(tǒng)
許文斌
(空軍航空維修技術(shù)學(xué)院 航空機(jī)械制造學(xué)院,湖南 長沙 410124)
引言
閥控非對稱缸電液系統(tǒng)由于具有響應(yīng)速度快、定位準(zhǔn)確、承載能力強(qiáng)等特點,廣泛應(yīng)用于工業(yè)機(jī)器人、航空飛行控制、自動化制造裝備等高精度位置定位裝置中[1]。然而,由于電液系統(tǒng)本身的強(qiáng)非線性、參數(shù)的不確定性、時變的外部負(fù)載擾動,導(dǎo)致系統(tǒng)靜動態(tài)特性非線性,易產(chǎn)生顫振和超調(diào)[2],從而影響系統(tǒng)魯棒性和位置追蹤精度。王海燕[3]采用滑模控制降低系統(tǒng)抖振,提高系統(tǒng)跟蹤性能。俞濱等[4]建立了液壓驅(qū)動單元位置控制系統(tǒng)的擴(kuò)張狀態(tài)觀測器和控制律,對控制系統(tǒng)擾動有一定的抑制作用,增強(qiáng)了系統(tǒng)穩(wěn)定性,提高了系統(tǒng)受外界干擾時的控制精度。姚成玉等[5]針對液壓矯直機(jī)建立PID 控制參數(shù)優(yōu)化模型,利用動力驅(qū)動微粒群算法優(yōu)化實現(xiàn)PID 控制參數(shù)優(yōu)化。WON D等[6]針對電液壓位置跟蹤系統(tǒng)采用反演控制,提高位置跟蹤性能。喬志剛等[7]為提高快鍛液壓機(jī)的控制精度與響應(yīng)速度,在傳統(tǒng)鍛壓機(jī)四通道負(fù)載口獨立控制與位置閉環(huán)控制原理的基礎(chǔ)上,提出快鍛液壓機(jī)速度位置復(fù)合控制策略,實現(xiàn)高精度定位。LI M等[8]提出了一種電液非線性并聯(lián)控制算法,實現(xiàn)高速跟蹤性能,降低能耗。張增寶等[9]針對比例溢流閥加載系統(tǒng),設(shè)計了模糊PID 的壓力控制器和基于速度前饋的模糊PID 位移控制策略,滿足系統(tǒng)速度跟蹤性能要求。鄭宇、何常玉等[10-11]針對電液伺服提出了自適應(yīng)魯棒控制,有效提高了系統(tǒng)的跟蹤精度和性能。TANG Y等[12]為了提高典型電液系統(tǒng)的加速度跟蹤性能,提出了一種結(jié)合逆補(bǔ)償技術(shù)和神經(jīng)自適應(yīng)控制器的實時加速度跟蹤策略。曾樂和宋昭等[13-14]利用神經(jīng)元網(wǎng)絡(luò)控制消除閥控非對稱缸系統(tǒng)的非對稱性,降低變化負(fù)載干擾影響,提高系統(tǒng)的響應(yīng)精度,改善動態(tài)跟蹤性能。本研究針對125 MN擠壓機(jī)、300 MN模鍛水壓機(jī)大型裝備閥控非對稱缸電液系統(tǒng),考慮電液系統(tǒng)參數(shù)不確定性和外部負(fù)載擾動,提出一種帶負(fù)載擾動觀測器的自適應(yīng)魯棒位置控制,提高系統(tǒng)魯棒性和位置跟蹤精度。
1 系統(tǒng)模型
1.1 系統(tǒng)原理圖
閥控非對稱液壓缸系統(tǒng)原理圖如圖1所示,圖中A1,A2分別為液壓缸無桿腔和有桿腔面積;p1,p2分別為液壓缸無桿腔和有桿腔壓力;V1,V2分別為液壓缸無桿腔和有桿腔體積;Q1,Q2分別為液壓缸無桿腔進(jìn)油流量和有桿腔進(jìn)油流量;ps為液壓泵輸出壓力;p0為系統(tǒng)回油壓力;m為等效質(zhì)量;Fd為外部負(fù)載;y為液壓桿位移;xv為伺服閥閥芯位移。

圖1 非對稱缸液壓系統(tǒng)原理圖
1.2 系統(tǒng)數(shù)學(xué)模型
伺服閥閥芯位移方程:
xv=kvu
(1)
式中,kv—— 伺服閥增益
u—— 伺服閥控制輸入信號
活塞桿運動動態(tài)方程:
(2)
忽略液壓缸內(nèi)外泄漏,液壓缸流量方程:
(3)
(4)
式中,E為液壓油等效體積彈性模量。
伺服閥流量方程:
(5)
(6)
式中,Cd—— 伺服閥流量系數(shù)
w—— 伺服閥開口度
ρ—— 油液密度
定義系統(tǒng)狀態(tài)變量:
則系統(tǒng)空間狀態(tài)方程為
(7)
由式(1)、式(3)~式(7)可得:
(8)

將f(x),g(x)代入式(8)可得:
(9)
式中,d(t) —— 系統(tǒng)外部負(fù)載擾動
g(x) —— 等效輸入控制增益
2 自適應(yīng)魯棒控制

(10)
gmin,gmax分別為g(x)的下限和上限,正常數(shù)。
代入式(9)可得:
(11)
取D為系統(tǒng)擾動之和,則有:
D≥Δf+d(t)
則式(11)可寫為:
(12)
2.1 滑模控制
定義系統(tǒng)狀態(tài)誤差為:
ei=xi-xid
(13)
式中,xid為系統(tǒng)狀態(tài)期望值,i=1,2,3。
為了提高系統(tǒng)狀態(tài)跟蹤精度,定義滑模函數(shù)為:
S=λ2e1+2λe2+e3
(14)
式中,λ為正常數(shù),取值以確保系統(tǒng)狀態(tài)較好地跟蹤期望值。
當(dāng)取S=0時,系統(tǒng)動態(tài)響應(yīng)為期望值,此時跟蹤誤差收斂于0。
定義控制切換函數(shù)為:

(15)
式中,Q,K為正常數(shù),Q為切換增益,調(diào)整Q的值以控制系統(tǒng)顫振;K為控制增益,調(diào)整K的值以調(diào)節(jié)系統(tǒng)響應(yīng)速度;sgn(·)為符號函數(shù)。
對式(14)微分可得:
(16)
將式(12)代入式(16)得:

(17)


(18)
對式(18)進(jìn)行分解簡化得:
u=un+us
(19)

2.2 自適應(yīng)控制
為了達(dá)到位置跟蹤和顫振控制的最佳平衡點,取邊界層厚度φ>0,用邊界層厚度函數(shù)來替代符號函數(shù),通過調(diào)節(jié)φ的大小,改善系統(tǒng)追蹤精度,則新的系統(tǒng)控制律為:
(20)

由于外部擾動是變化的,為抑制可變外部擾動對系統(tǒng)性能的影響,提高系統(tǒng)響應(yīng)速度,同時減小顫振,通過構(gòu)建擾動觀測器,使Q跟隨擾動而變化,以提高控制器的魯棒性。要確保自適應(yīng)切換增益的Q取值,須滿足以下條件以保證控制器的穩(wěn)定性。

(21)
當(dāng)Q>D時,式(14)滑模條件成立,切換增益Q由式(22)確定。

(22)

通過擾動觀測器估測D的大小,調(diào)整切換增益Q大于外部擾動的上限值,以確保式(22)成立。
2.3 擾動觀測器
由式(12)可得:
(23)


(24)
式中,常數(shù)L>0,為觀測器非線性增益,依據(jù)誤差大小通過反復(fù)調(diào)試而得到。
為提高擾動觀測器效果,引入輔助變量z,構(gòu)建非線性擾動觀測器代替式(24)給定初始擾動觀測器,定義:
(25)
則由式(24)、式(25)可得:
(26)
則非線性擾動觀測器為:
(27)
對非線性擾動觀測器構(gòu)建一階濾波器:
(28)
則由式(24)、式(26)可得:
(29)
則有:
(30)

(31)
則由式(17)可得:

(32)
構(gòu)建如下李雅普魯夫函數(shù):
(33)
對式(33)微分得:
(34)
由式(20)、式(29)、式(32)、式(34)可得:
(35)
根據(jù)式(22)、式(35)則切換增益控制可寫為:

(36)
通過擾動觀測器來計算切換增益,可以提高控制器的魯棒性,更加適用于大范圍的時變外部擾動。
2.4 可變邊界層厚度
通過引入邊界層厚度函數(shù)可以減小系統(tǒng)顫振,但系統(tǒng)的跟蹤精度受到影響,從而降低系統(tǒng)的性能。顫振幅度越小,控制器的魯棒性越好,但降低跟蹤性能,且由于外部擾動具有時變性,從而進(jìn)一步影響顫振邊界。因此,在時變擾動下,需要改變邊界層的厚度,獲得最優(yōu)的跟蹤精度和平滑的控制輸入,以提高系統(tǒng)魯棒性和跟蹤精度。引入典型的可變邊界層厚度公式:
(37)
式中, 0<φ1<φ2<φ3為不同的邊界層厚度,取值以獲得最佳的跟蹤精度和平滑的控制為依據(jù);輸入ε1<ε2為正常數(shù),為切換閾值處的擾動估計誤差,以保證系統(tǒng)初始狀態(tài)附著在滑模面的邊界層上。
3 實驗分析
圖2為實驗系統(tǒng)原理圖。實驗系統(tǒng)主要包括三部分:控制部分由非線性觀測器、控制器和上位機(jī)組成,驅(qū)動部分由比例伺服閥和驅(qū)動缸組成,負(fù)載模擬部分由比例溢流閥、溢流閥和負(fù)載缸組成,液壓系統(tǒng)試驗臺參數(shù)如表1所示,系統(tǒng)控制參數(shù)設(shè)置如表2所示。

表1 液壓實驗臺參數(shù)

表2 系統(tǒng)控制參數(shù)設(shè)置

1.驅(qū)動泵 2、5、11.溢流閥 3、4.負(fù)載泵 6、7.比例溢流閥8.負(fù)載缸 9.驅(qū)動缸 10.比例伺服閥圖2 實驗系統(tǒng)原理圖
圖3~圖5為固定負(fù)載1600 N時系統(tǒng)位移跟蹤響應(yīng)y、切換增益信號Q和切換控制信號U。固定負(fù)載下,系統(tǒng)切換控制增益和切換控制信號變化光滑,系統(tǒng)響應(yīng)迅速、魯棒性強(qiáng),系統(tǒng)位置跟蹤精度高。

圖3 固定負(fù)載下系統(tǒng)位移響應(yīng)

圖4 固定負(fù)載下切換控制增益
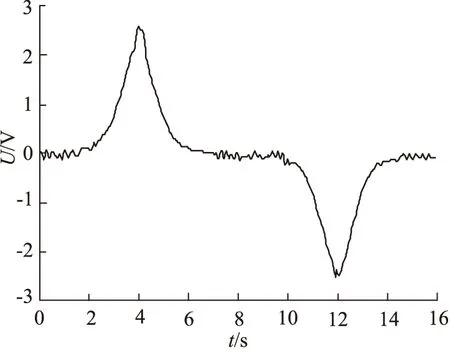
圖5 固定負(fù)載下切換控制信號
圖6~圖8為變化負(fù)載擾動下系統(tǒng)位移跟蹤響應(yīng)、外部負(fù)載擾動F和切換控制信號。圖6對比了PID控制和帶擾動觀測器的自適應(yīng)滑模控制響應(yīng)結(jié)果,可知在外部負(fù)載發(fā)生變化時,本研究提出的控制策略可獲得更好的位置跟蹤精度,同時系統(tǒng)顫振明顯減小,系統(tǒng)具有較好的魯棒性,提出的控制策略能有效地抑制變化負(fù)載對系統(tǒng)性能的影響。
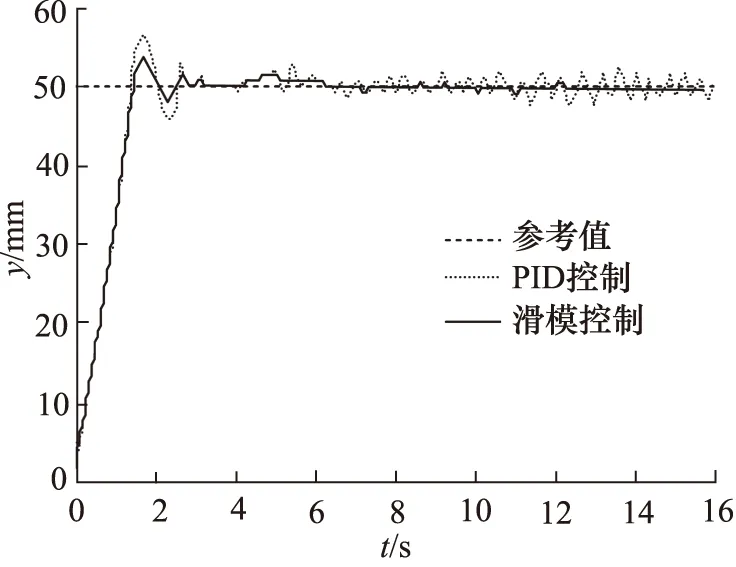
圖6 變化負(fù)載擾動下系統(tǒng)位移響應(yīng)

圖7 模擬變化負(fù)載
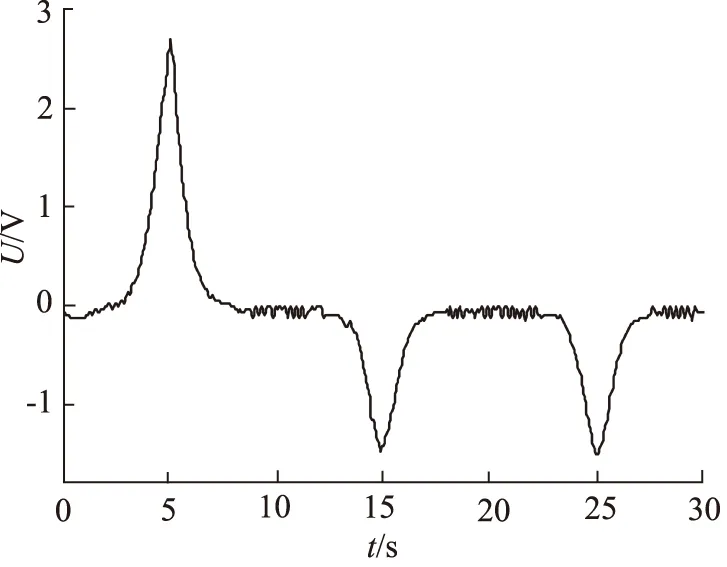
圖8 變化負(fù)載擾動下切換控制信號
4 結(jié)論
本研究針對大型裝備閥控非對稱液壓缸系統(tǒng)存在參數(shù)不確定和外部擾動,為了減小系統(tǒng)顫振,提高響應(yīng)速度、魯棒性和位置跟蹤精度,基于滑模控制,構(gòu)建擾動觀測器,設(shè)計一種自適應(yīng)滑模控制策略,針對變化負(fù)載擾動引入可變邊界層厚度函數(shù)。實驗結(jié)果證明所提出的控制策略可以是系統(tǒng)獲得好的魯棒性和位置跟蹤性能,有效抑制變化負(fù)載對系統(tǒng)性能的影響。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
