基于模糊PID的變幅液壓控制系統
2021-06-16 00:27:16陳志高胡仕成黎新齊
液壓與氣動 2021年6期
陳志高,胡仕成, 黎新齊
(1.中南大學 機電工程學院,湖南 長沙 410083;2.高性能復雜制造國家重點實驗室,湖南 長沙 410083;3.山河智能技術中心,湖南 長沙 410100)
引言
高空帶電機器人[1-2]是由機械臂、抓手、液壓控制系統、車體所構成,抓手通過控制來完成自主識別導線位置,自動剝切導線絕緣層和支線線路與引線線路搭接等工作,因此保證抓手位置和操作的精確定位完全要依靠臂架的穩定控制,在其工作過程中,臂架不能出現振動抖動,要保證臂架相對穩定。
為了提高臂架液壓控制的穩定性,對液壓控制技術進行廣泛研究[3-8],李閣強等[9]提出BP神經網絡控制策略,設計了神經網絡控制器,搭建模型并對其仿真,結果顯示基于神經網絡控制的閉環液壓系統可以提高速度和壓力的控制精度及穩定性能;李廣等[10]采用非線性PID控制的方法,設計了非線性PID控制模型,通過跟蹤器調節控制器參數,對液壓缸活塞的速度進行了仿真驗證,結果表明該控制方法可以提高液壓系統的穩定性;石家慶等[11]提出了閥控缸液壓系統在變負載下液壓鎖的一種模式,解決了系統振動抖動幅度較大的問題。
響應滯后時間、超調量、穩定時間是系統穩定性的反映指標,高空帶電機器人是要保證抓手的工作精度,即工作時抓手可以精準的抓到主線完成線路維護檢修任務,因此系統的超調量是優先需要滿足的指標,必須盡可能降到最低。本研究設計了模糊PID控制器閉環液壓控制系統來提高臂架的穩定性,不僅要滿足超調量降低的要求,還要相對縮短系統的響應滯后時間和穩定時間,達到系統高精度、快響應的目標。以高空帶電機器人的臂架變幅液壓系統為研究對象,建立變幅液壓系統液壓缸的數學模型[12],設計模糊PID控制器,在MATLAB的Simulink環境下建立無PID、經典PID、模糊PID三種控制方案的仿真模型,最后通過搭建實驗平臺驗證了所設計的模糊PID控制器的控制性能。
1 臂架系統總體設計
1.1 臂架三維模型
高空帶電機器人主要包括臂架系統和液壓控制系統,臂架系統包括底座、豎直臂、水平桿、伸縮桿、擺動桿、抓手。臂架液壓控制系統主要由5大部分構成,分別為動力元件、執行元件、控制調節元件、輔助元件和工作介質,臂架系統如圖1所示,具體桿件參數如表1所示,液壓缸參數如表2所示。

1.旋轉底座 2.豎直臂 3.連接桿 4.水平桿5.擺動桿 6.抓手圖1 高空帶電機器人三維模型

表1 臂架各桿件參數

表2 臂架各液壓缸參數
1.2 臂架的變幅液壓控制系統
高空帶電機器人通過遠程控制臂架的液壓系統來完成一系列高空帶電工作,臂架的液壓控制系統依靠頂升油缸、擺動油缸、變幅油缸的協調配合來實現,變幅液壓控制系統原理圖如圖2所示,主要由液壓泵、電液換向閥、平衡閥、變幅液壓缸等組成。

圖2 變幅液壓控制系統原理圖
2 液壓平衡回路數學模型的建立
液壓平衡回路如圖3所示,該回路液壓缸力平衡方程為:

圖3 液壓缸平衡回路
(1)
式中,m—— 總質量
xp—— 活塞的位移
B—— 阻尼系數
FL—— 外負載力
Ff—— 摩擦力
pA—— 無桿腔壓力
AA—— 無桿腔有效面積
pB—— 有桿腔壓力
AB—— 有桿腔有效面積
拉普拉斯變換:
AApA(s)=MY(s)·s2+BY(s)+KY(s)
(2)
流量連續方程:
(3)
式中,np—— 電機轉速
Dp—— 液壓泵的排量
Cp—— 泄漏系數
pp—— 液壓泵出口壓力
VA0—— 無桿腔初始容積
βε—— 有效體積彈性模量
拉普拉斯變換得:
(4)
系統的傳遞函數為:
(5)
3 模糊控制器設計
3.1 模糊PID原理
自適應模糊PID控制器[13-14]以液壓缸活塞桿的偏差e和偏差變化率ec作為輸入,可以滿足不同時刻的e和ec對PID參數自整定的要求。利用模糊控制規則在線對PID參數進行修改,便構成了自適應模糊PID控制器,其結構如圖4所示。

圖4 模糊PID控制器結構
圖中r(t)是輸入設定值函數,y(t)輸出實際值函數,Δkp, Δki, Δkd為模糊輸出變量。PID控制器的輸入變量依據為:
Kp=Δkp+{e,ec}p
Ki=Δki+{e,ec}i
Kd=Δkd+{e,ec}d
其中,{e,ec}為不同時刻的偏差和偏差變化率對PID參數的調整函數。
3.2 模糊變量與模糊規則
設置e,ec,Δkp,Δki,Δkd的論域范圍,輸入變量e,ec設置為{NB,NM,NS,ZO,PS,PM,PB},模糊論域[15]均為{-3,-2,-1,0,1,2,3}。模糊推理后的輸出變量Δkp,Δki,Δkd,采用增量形式,其變化范圍:Δkp為[-1,1],Δki為[-10,10],Δkd為[-0.03,0.03],其中e,ec輸出變量的隸屬度函數設為7個,具體隸屬度函數曲線如圖5所示。

圖5 各變量隸屬度函數
模糊推理環節需要確定模糊控制規則,從系統的穩定性、響應速度、超調量和穩定精度等各方面來考慮模糊控制規則,模糊規則是根據當前時刻系統產生的誤差,來制定的相應應對措施,確保系統各方面的性能。比例系數針對的是系統響應速度,積分系數針對的是系統穩態誤差,微分系數針對的是系統動態特性,模糊規則表建立的依據如圖6所示,Δkp,Δki,Δkd的具體模糊規則表見表3~表5。
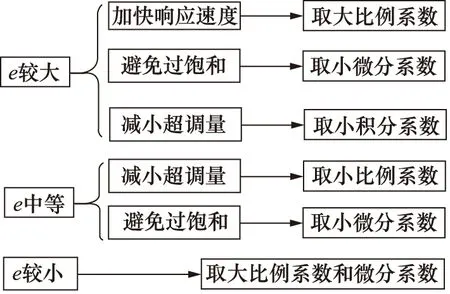
圖6 模糊規則表建立的依據

表3 Δkp的模糊規則表
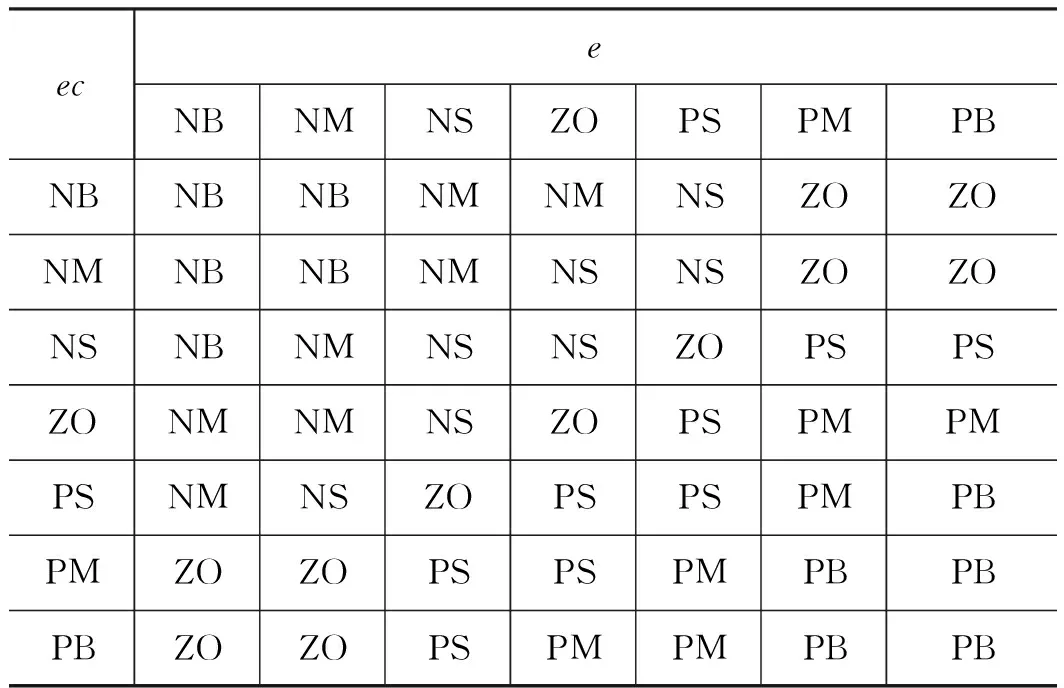
表4 Δki的模糊規則表
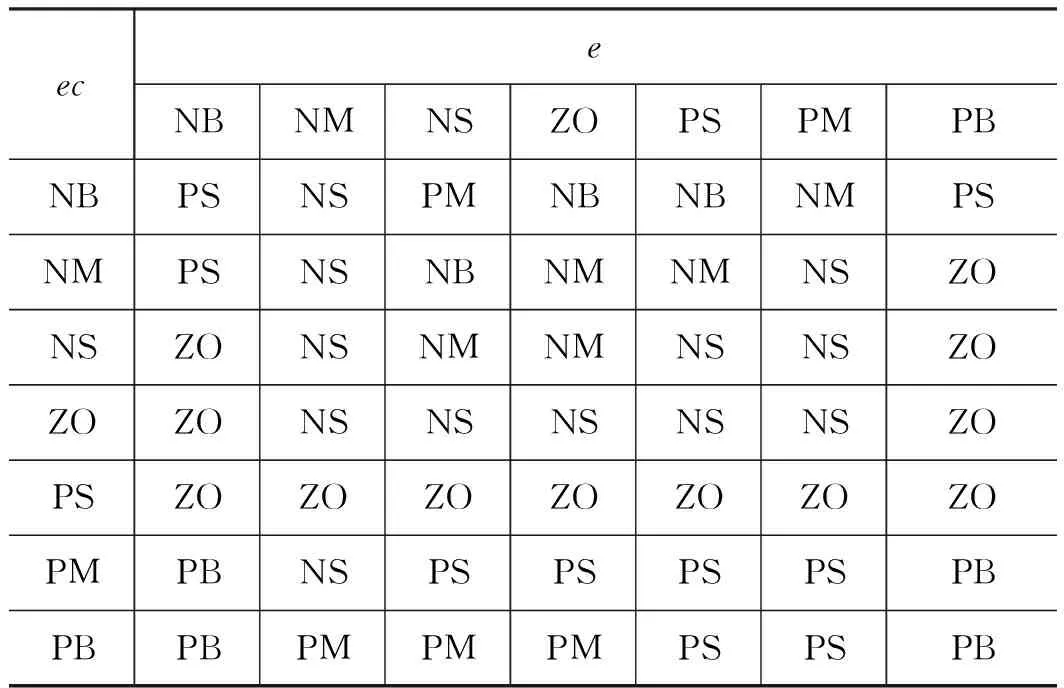
表5 Δkd的模糊規則表
輸出變量的模糊控制規則表建立好后,可根據以下流程來進行Δkp,Δki,Δkd的自適應校正,具體工作流程圖如圖7所示。
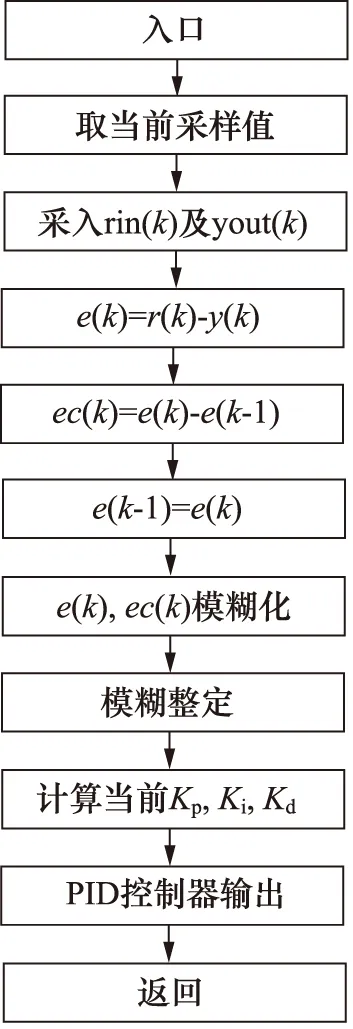
圖7 工作流程圖
4 MATLAB仿真分析
根據變幅液壓控制系統模型,用MATLAB的Simulink進行建模仿真,模型為模糊PID控制、經典PID控制和無PID控制三種方案的比較仿真模型。建立的仿真模型圖如圖8所示。輸入信號設為階躍信號,所得到仿真結果如圖9所示。

圖8 3種方案的仿真模型
由圖9可知,在第2秒時給變幅液壓控制系統輸入信號后,模糊PID相對于經典PID在響應時間、超調量、穩定時間上有較大改善。

圖9 3種控制系統的仿真對比圖
模糊PID控制的響應滯后時間最短為0.2 s,相對于經典PID的0.55 s,縮短了63.6%,超調量也大大降低,由PID控制系統的最大超調量0.09 m降到了0.01 m,超調量相對降低了88.9%,穩定時間也由PID控制系統的2.4 s縮短至0.4 s,相對降低了83.3%。
5 實驗驗證與結果分析
為了驗證無PID控制、經典PID控制和模糊PID控制3種方案的實際控制效果,根據變幅液壓控制系統的工作原理進行搭建實驗平臺[16],保證實驗所添加的負載等外界條件與仿真的一致,按照仿真模型的思路進行逐一實驗,并且給定相同的階躍信號,所得到的實驗結果數據如圖10所示。

圖10 3種方案實驗圖
由實驗結果圖可知,在2.5 s時給變幅液壓系統輸入階躍信號后,三種系統控制方案的實驗結果與仿真結果大體相近,并且從實驗結果上可以看出模糊PID控制器在響應時間、超調量、穩定時間相較于無PID與經典PID都有較大的改善,模糊PID控制下的系統響應滯后時間相對于經典PID縮短了0.2 s,超調量降低了0.03 m,穩定時間縮短了1.7 s。
6 結論
(1) 本研究所設計的模糊PID控制器,在變幅液壓控制系統中表現出來的控制性能優越,相較于經典PID有較明顯的改進,能夠大幅度的降低超調量和減少穩定時間,提高臂架的穩定性能;
(2) MATLAB仿真結果顯示,模糊PID控制器相較于經典PID響應滯后時間縮短了63.6%,超調量相對降低了88.9%,穩定時間相對降低了83.3%;
(3) 實驗結果顯示,模糊PID控制下的系統響應滯后時間相對于經典PID縮短了0.2 s,超調量降低了0.03 m,穩定時間縮短了1.7 s。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45
