NAVDAT廣播授時定位接收機設計
2021-06-17 07:12:22梅建群高萬明許璟華
電子制作 2021年5期
關鍵詞:系統(tǒng)
梅建群,高萬明,許璟華
(1.交通運輸部東海航海保障中心,上海,200086;2.中科睿格(北京)技術有限公司,北京,100094)
0 引言
自航海活動伊始,導航就是海上安全航行的重要保障。最古老的導航手段是天文導航,隨著航海技術的發(fā)展,天文導航逐漸成為航海活動中必備的導航手段。無線電產生后,無線電導航和通信技術快速發(fā)展。二戰(zhàn)初期,美國國防部成功研制了Loran-A海用中遠程無線電導航系統(tǒng)[1],該系統(tǒng)于20世紀70年代完成部署,但因其定位精度、可靠性、可用性差,不能滿足美軍作戰(zhàn)要求,因而美國在二戰(zhàn)末期開始研制Loran-C,該系統(tǒng)于1957年研制成功[2]。1974年,美國將Loran-C系統(tǒng)開放給民用,多個國家和地區(qū)開始了Loran-C系統(tǒng)建設。當前Loran已演進到能提供PNT(Positioning, Navigation and Timing)功能的e-Loran系統(tǒng)。
衛(wèi)星技術的發(fā)展,為天基導航提供了可能。上世紀70年代初,美國開始研制基于衛(wèi)星平臺的導航系統(tǒng)GPS(Global Positioning System),該系統(tǒng)于1994年全面組網并提供全球定位服務[3]。當前,全球衛(wèi)星導航系統(tǒng)中已包含美國的GPS、俄羅斯的GLONASS(Global Navigation Satellite System)、歐洲Galileo和中國北斗等四大系統(tǒng)[4]。盡管如此,陸基無線電導航因與衛(wèi)星導航的頻段、功率覆蓋等差異,仍為海上導航的重要手段。
海上無線通信系統(tǒng)能提供中遠程通信距離覆蓋,當前全球典型的海上無線系統(tǒng)包括中頻(MF,Middle Frequency)NAVTEX系統(tǒng)[6]、高頻(HF,High Frequency)PACTOR系統(tǒng)、甚高頻(VHF,Very High Frequency)Telenor系統(tǒng)和船舶自動識別系統(tǒng)(AIS,Automatic Identification System)[5]。盡管上述系統(tǒng)能滿足一定場景的海上通信需求,但其存在的通信速率低、延遲大、無法傳輸實時業(yè)務、無法獲取用戶即時信息等問題,限制了上述系統(tǒng)在當前日益豐富的業(yè)務場景的應用。為此,無線電搜救分委會提出了水上數字廣播系統(tǒng)NAVDAT(Navigational Data)[6]。
無線電導航與通信系統(tǒng)具有很大的相似性,如能將其合并,將大大降低系統(tǒng)建設成本、維護成本和使用成本。基于將NAVDAT數字廣播系統(tǒng)擴展成NAVDAT廣播授時定位一體化系統(tǒng)的需要,本文提出NAVDAT廣播授時定位接收機設計方案,為后續(xù)研究奠定基礎。
1 系統(tǒng)總體設計
NAVDAT在包含MF與HF頻段的多條信道上播發(fā)OFDM(Orthogonal Frequency Division Multiplexing)信號,各子載波可以支持1~10kHz調制帶寬,4QAM(Quadrature Amplitude Modulation)、16QAM、64QAM等多種調制方式。NAVDAT信道信息如表 1所示[8-9]。

表1 NAVDAT HF頻段信道分配
NAVDAT廣播授時定位接收機完成對NAVDAT廣播授時定位信號的接收、解調和解碼,輸出廣播授時定位相關信息。NAVDAT廣播授時定位接收機框圖如圖 1所示,整個接收機由天線、射頻前端、解調器、處理器和顯控器組成。接收天線是覆蓋300kHz~30MHz的天線。射頻前端完成對射頻信號的預選、濾波、放大、模數轉換等處理。解調器包含廣播解調器和授時定位解調器,廣播解調器針對NAVDAT廣播信號進行解調,授時定位解調器針對NAVDAT授時定位信號進行解調。處理器包含廣播處理器和授時定位處理器,廣播處理器處理NAVDAT廣播相關信息的處理,對解調后信號進行解碼并實現消息分發(fā),授時定位處理器對授時定位解調器輸出的授時定位信息進行處理,實現授時定位功能,輸出授時定位結果。顯控器是一個綜合顯示控制器,完成對NAVDAT廣播授時定位信息的顯示及接收機的用戶控制接口。
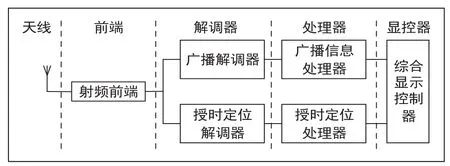
圖1 NAVDAT廣播授時定位接收機框圖
2 系統(tǒng)詳細設計
■2.1 系統(tǒng)詳細設計框架
圖2為NAVDAT廣播授時定位接收機詳細設計框圖,時鐘系統(tǒng)為整個接收機射頻前端、解調器、處理器等提供時鐘參考,電源系統(tǒng)為接收機提供電源。整個業(yè)務相關的處理運行于單核或雙核CPU上,CPU接收按鍵KEYS輸入信息,根據輸入的相關設置進行處理,并將結果顯示到LCD上。CPU根據對射頻輸入功率的測量結果,對增益進行控制,實現自動增益控制功能,同時對預選器進行相應的控制,完成波段選擇與切換。射頻前端輸出信號分別輸入到OFDM解調器和授時定位解調器,OFDM解調器在CPU控制下輸出數據流(DS,Data Stream)、發(fā)射信息流(TIS,Transmitter Information Stream)和調制信息流(MIS,Modulation Information Stream)。數據流DS用于發(fā)送消息文件,這些消息文件通過文件復用程序格式化,該流可使用4QAM、16QAM或64QAM進行調制。發(fā)射機信息流TIS提供了數據流糾錯碼、發(fā)射機標識、日期及時間的信息,該信息流可選用4QAM或16QAM進行調制。調制信息流MIS承載了頻譜占用、發(fā)射信息流TIS和數據流DS調制方式(4QAM、16QAM或64QAM)的信息,該信息流使用4QAM調制子載波,保證接收機可靠的解調該信息。授時定位解調器存在多個跟蹤通道,分別對各發(fā)射臺授時定位信號進行跟蹤,并輸出從臺相對于主臺的接收信號時間差?T1、?T2和?T3等,CPU對授時定位解調過程進行控制,并對相關時間差進行處理,計算授時定位結果,根據授時定位結果調整本地時鐘系統(tǒng),從而實現本地時鐘與UTC時間的同步。
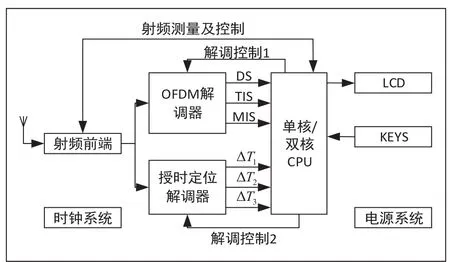
圖2 NAVDAT廣播授時定位接收機詳細設計框圖
■2.2 系統(tǒng)硬件方案
針對NAVDAT廣播授時定位接收機發(fā)展的不同階段,本文提出兩種不同的實現方式。首先針對當前NAVDAT協(xié)議制定和系統(tǒng)驗證階段,提出接收機原型驗證方案。其次針對未來NAVDAT批量應用,提出批量實現方案。
圖3為NAVDAT接收機原理樣機方案,該方案采用射頻直采結構[10],其最大的特點是滿足系統(tǒng)級、算法快速迭代驗證的需求。射頻前端由帶通濾波器(BPF,Band Pass Filter)、自動增益控制器(AGC,Auto Gain Control)和模數轉換器(ADC,Analog to Digital Converter)組成,基帶處理全部由ARM完成,ARM上可以移植linux操作系統(tǒng),整個基帶算法開發(fā)用C/C++甚至Python來完成。ARM連接按鍵(KEYS)、USB、以太網(LAN)、LCD等,完成與用戶的交互及信息傳輸。

圖3 NAVDAT接收機原理樣機方案
圖4為NAVDAT小批量方案,該方案兼顧性價比與靈活性,針對不同信道,均能提供優(yōu)異的性能。該方案采用超外差結構[11],一級變頻,不固定中頻上實現信道濾波,中頻窄帶濾波器為整機提供優(yōu)異的抗干擾性能,滿足船載復雜電磁環(huán)境需要。如需實現不同頻段信道的同時接收處理,需要多個射頻前端,不同前端本振(LO,Local Oscillator)根據需要調整,使中頻固定且盡量少,以簡化前端設計及成本。
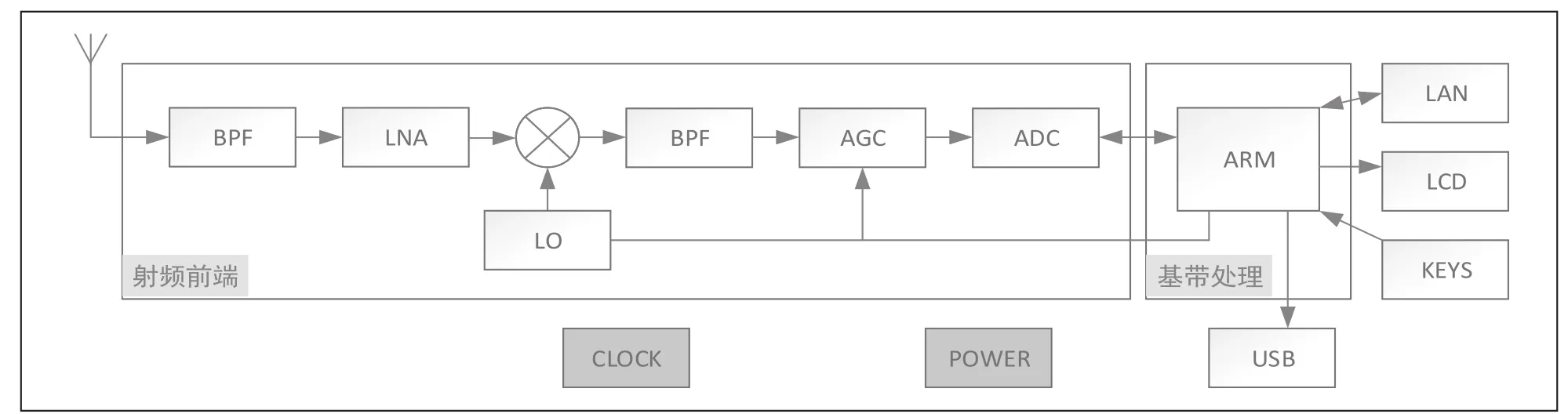
圖4 NAVDAT接收機小批量方案
圖 5為NAVDAT接收機量產方案,該方案沿用小批量超外差接收機架構,采用專用芯片(ASIC,Application Specific Integrated Circuit)進一步提升接收機性能,降低批量成本。本方案將MF/HF預選濾波器獨立置于ASIC外,ASIC內部集成多個信道的下變頻處理單元,共用ADC,并設計專用解調電路(Dem,Demodulator)以降低處理器ARM負擔,降低整機功耗。
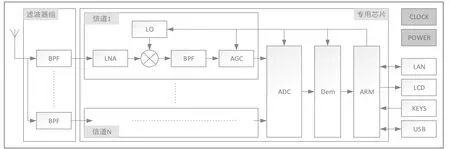
圖5 NAVDAT接收機量產方案
3 結束語
本文針對將NAVDAT數字廣播系統(tǒng)擴展成NAVDAT廣播授時定位系統(tǒng)的需要,提出了適用于NAVDAT廣播授時定位系統(tǒng)的接收機設計方案。首先,從總體設計上對NAVDAT廣播授時定位接收機應具備的功能及模塊進行分解。然后從詳細設計上分析各模塊信息流及數據處理。最后,提出針對NAVDAT廣播授時定位接收機不同發(fā)展階段的三種硬件設計方案,并對其特點進行了描述。下一階段,將進行原理樣機的開發(fā),驗證相關算法及方案的可行性。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32