考慮電動汽車接入的主動配電網優化調度
2021-06-17 07:05:24諸曉駿陳曦李妍王球王瓊李澤森
電力工程技術 2021年3期
諸曉駿,陳曦,李妍,王球,王瓊,李澤森
(國網江蘇省電力有限公司經濟技術研究院,江蘇 南京 210008)
0 引言
當今世界的能源政策和環境狀況受到普遍關注,風能、太陽能等一系列可再生能源迅速發展[1—4]。分布式能源的大量接入給電力系統的穩定性和安全性帶來了較大挑戰,大規模無序接入的電動汽車負荷更是加劇了配電網的峰谷差,導致負荷高峰時期電能質量降低[5—7]。主動配電網(active distribution networks,ADN)可通過智能網絡控制手段對分布式電源(distributed generation,DG)和負荷進行主動控制和管理,其調度和運行方式較傳統配電網更加復雜[8],近年來也愈加受到重視。
針對上述背景,研究電動汽車接入ADN的有序充電模型并形成與之適應的考慮源網荷的ADN優化調度方法至關重要。目前關于這方面的研究仍然較少,大部分研究成果集中在從ADN的單個角度(如源、網或荷側)進行優化。文獻[9]提供了基于風能和太陽能互補特性的ADN調度模型框架,通過協調控制風能和太陽能的輸出,有效降低風能和太陽能的波動性。文獻[10]中,通過儲能的容量配置和優化降低了風能和太陽能的波動性,此方法是針對源側的調度優化。關于網側調度優化的研究可參見文獻[11—15],其中文獻[11—13]采用人工智算法實現網絡重構,提升了配電網的綜合效益,文獻[14—15]研究了故障恢復技術對配電網重構的影響。對于荷側,文獻[16]提出了一種基于分時電價模型的荷側調度方法。
此外,當前的研究很少將電動汽車充電行為和電網多維調度進行協同優化。文獻[17] 對由電動汽車無序充電行為導致的電力傳輸損耗進行了量化分析,研究表明大量隨機電動汽車充電負荷的接入對電能質量影響顯著。文獻[18]指出有序電動汽車充電策略對提升傳輸線路的負載情況大有裨益。文獻[19]表明電動汽車的充放電行為可以通過能量管理策略進行有序化管理,從而減少化石燃料的消耗,提高電力傳輸網絡的穩定性。
為進一步研究大量電動汽車接入背景下的AND優化,文中構建了一套衡量ADN性能的綜合評估體系,并提出一種電動汽車智能充電策略和一套源網荷側多階段優化調度方法,最后通過算例仿真驗證了優化模型和調度策略的有效性。文中理論和模型可被廣泛運用于電力系統的日前調度,實現ADN的高效運行和管理。
1 AND評估體系
文中綜合考慮主動控制性、主動管理性和主動經濟性,建立ADN評估體系,衡量電力系統運行的安全性、經濟性和環境成本等多個指標。
1.1 主動控制性
主動控制性反映了調度運行方法對電力系統穩定性和安全性方面的影響,該效益可以通過電壓合格率U(t)、主要線路負載率L(t)、網絡重構頻率πswitch來表示。U(t)體現了控制手段的有效性;L(t)反映了區域電網線路傳輸容量的實際使用程度和區域電網的建設水平;πswitch是衡量網絡重構合理性的重要參數,其可折算成調度成本進行表征。
1.2 主動管理性
文中將電動汽車有序充電調度以及切負荷操作納入主動管理性的優化范疇,并基于此提出以下3項基本指標。
1.2.1 電動汽車用戶滿意度
合適的電動汽車充電策略會引導用戶調整充電時間,降低充電成本,也可以優化控制每輛充電汽車的充電電量,進而影響用戶滿意度。文中用區域電網內電動汽車平均充電費用Cavg和電動汽車平均滿充率Efull反映用戶滿意度。
1.2.2 等效負荷曲線標準差
在有序充電模式下,電動汽車的充電優化調度管理可以更好地實現削峰填谷,文中采用等效負荷曲線標準差Se量化有序充電策略對ADN中負荷曲線優化管理的有效性。
1.2.3 可中斷負荷補償成本
在與用戶簽訂供電協議后,電力公司可以在系統過載時切斷部分協議內的負荷,同時按照合同約定的價格為用戶提供切負荷補償ΠIL(t)。
1.3 主動經濟性
隨著環境保護意識日漸增強,環境效益在電網規劃中占有越來越重要的地位,文中提出3個動態經濟指標。
1.3.1 網損費用
網損費用πloss不僅反映了電網結構的合理性,也反映了電網運行的經濟性。
1.3.2 新能源接入費用
文中考慮的新能源接入費用Πsource包含風能、太陽能、微型燃氣輪機的接入電網費用,也包含了從上級電網購電的費用。
1.3.3 環境污染懲罰費用
文中選擇了二氧化碳(CO2)和二氧化硫(SO2)作為2種典型污染物,將環境污染作為懲罰進行了經濟性折算,得到環境污染懲罰費用Πpenalty。
2 ADN三階段優化調度模型
為了抑制和補償源側間歇性能源和荷側電動汽車大規模接入給電網帶來的波動,文中建立了源-網-荷三階段協同優化調度模型,該模型的優化方向和優化目標均以第1章評估體系涵蓋的指標為基礎,具體對應關系見圖1,其中K為開關動作次數。
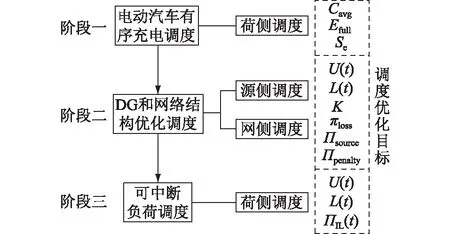
圖1 ADN三階段優化調度模型Fig.1 Three-stage optimization scheduling model of ADN
2.1 電動汽車有序充電調度
該階段是以電動汽車負荷為主的荷側調度,調度目標為ADN評估體系中的主動管理性相關指標,助力充電負荷移峰填谷。隨著信息通信技術的快速發展,電動汽車智能調度系統可以為電動汽車充電搭建有力的網絡化支撐平臺。典型電動汽車智能調度模型如圖2所示。
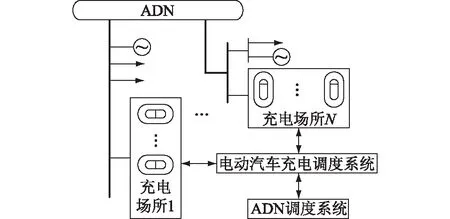
圖2 典型電動汽車智能調度模型Fig.2 Typical intelligent scheduling model of electric vehicles
當用戶選擇電動汽車充電調度系統時,用戶會對峰谷電價進行充電行為響應。此外,在充電調度系統的策略下,電動汽車充電地點也得到優化,不僅可提高充電效率,還可提升電動汽車用戶的滿意度。文中綜合充電時間、充電地點以及充電方式等因素,提出電動汽車充電調度模型。
2.1.1 充電時間優化
無序充電模式下,用戶一旦到了充電站就會對電動汽車充電。而在電動汽車智能調度系統下,用戶可以在充電樁處輸入到達充電場所時間、預計離開充電場所時間以及預期充電量。然后,電動汽車智能調度系統依據停車期間的峰谷電價制定電動汽車優化充電策略。
假設電動汽車的到達時間和預計離開時間分別為tarr,tdep,對應的電動汽車電量狀態分別為W1,W2,則預計的停車時間為:
Tp=tdep-tarr
(1)
預計的充電量為:
Wch=W2-W1
(2)
完全充滿電所需時間為:
Tr=Wch/Pch
(3)
式中:Pch為電動汽車充電功率。
在停車期間,電動汽車充電調度系統可以盡量確保用戶在最低電價時最早充上電。這樣不僅可以削峰填谷,還可以提高電動汽車用戶的滿意度。充電的實際開始時間tch和充電成本p分別如式(4)、式(5)所示。
(4)
(5)

2.1.2 充電地點優化
無序充電模式下,當現有充電站的所有充電樁均被占用時,用戶不得不等待較長時間才能有充電機會。而電動汽車充電調度系統可考慮對充電地點進行優化,用戶可以根據指示導航到最近的有閑置充電樁的充電站進行充電。
(6)
式中:q為t時刻電動汽車充電調度系統提供的充電地址代碼;At,Bt分別為t時刻不可用、可用充電站的集合。
2.1.3 充電方式優化
電動汽車慢充方式對電動汽車的電池比較有利,但其通常會耗費較長時間(一般為6~8 h)才能完全充滿電。同時,充電站的慢速充電樁被長時間占用也會導致后到達的電動汽車無法充電。而快充方式充電速度快,可以滿足日益增加的電動汽車用戶需求,但不可避免地會影響電池壽命。
文中提出一種綜合充電方式,以快充為主,慢充為輔,并作了如下假設:當電動汽車用戶在白天很早就到達辦公地區附近的充電站時,其傾向于選擇快充方式;當電動汽車用戶在夜間停放在居住地區附近的充電站時,傾向于選擇慢充方式。
2.2 DG和網絡結構調度
該階段綜合考慮光伏、風電的荷側調度和配電網結構的網側調度,調度目標為ADN評估體系中的主動控制性和主動經濟性相關指標,旨在滿足電網調度的安全性和經濟性,并提高新能源消納能力。通過引入權重系數及納入懲罰函數,將多目標函數轉化成單目標函數。主目標函數為:
(7)
式中:ω1,ω2,ω3,ω4分別為開關操作成本系數、系統網損成本系數、新能源接入費用系數、環境懲罰系數。
懲罰函數為:
P(t)=p1[1-U(t)]+p2l(t)
(8)
(9)
式中:p1為電壓不合格率懲罰系數;p2為與主線路負載率相關的懲罰系數;L0為主線路最大可接受負載率;l(t)為t時刻主要線路過載水平。
因此,本階段的優化目標為:
min[M(t)+P(t)]
(10)
優化過程中,需要滿足電力系統中的潮流約束、節點電壓限值約束、線路最大傳輸容量約束和電源容量約束。此外,還必須滿足整個配電網中的連通約束和輻射約束等。文中在迭代優化過程中使用了遺傳算法進行優化,并采用根節點融合法對網絡結構進行了修復和完善,實現網絡結構的迭代優化。
2.3 可中斷負荷調度
該階段是以切負荷為主的荷側調度,調度目標為ADN評估體系中的主動管理性、主動控制性和主動經濟性相關指標,旨在保證電網的安全穩定運行。當前述2個階段的優化方法仍不能有效處理系統運行中某時刻的低電壓、線路過載等問題時,需采用該階段的調度優化方法。
該階段的優化包含兩部分:削減電動汽車負荷;削減可中斷負荷。在電動汽車充電樁接收到電動汽車充電調度系統的指令后,將會臨時關停部分充電樁,并在收到重啟指令前一直保持斷電狀態。
在削減電動汽車負載后,如果電網運行水平仍不能滿足要求,可中斷負荷則會參與調度。該階段的優化目標為:
min{pshedPshed(t)+p1[1-U(t)]+p2l(t)}
(11)
式中:pshed為切負荷的補償成本系數;Pshed(t)為t時刻的切負荷量。
Pshed,i(t)≤ηPi(t)
(12)
式中:Pshed,i(t)為t時刻節點i的負荷量;Pi(t)為t時刻節點i的負荷;η為電力公司和用戶共同約定的切負荷系數。
該階段優化需滿足潮流、電壓等多種約束,和DG和網絡結構優化調度階段相同,文中采用遺傳算法進行求解。
3 案例分析
為驗證所提方法的有效性,采用如圖3所示的IEEE 33節點系統進行算例仿真。
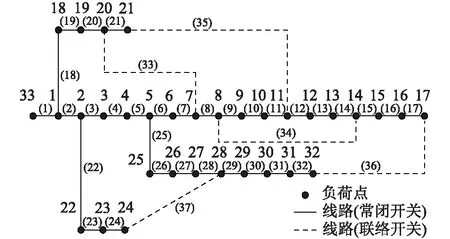
圖3 IEEE 33節點網絡拓撲Fig.3 Topology of IEEE 33-bus test system
假設居民負荷分別位于節點22,23,24,28,29,30,31,32,商用負荷則分布在其余節點,(1)—(37)為開關編號。當前區域內共配置20座電動汽車充電站,每個充電站配置35個充電樁。電動汽車共500輛,每輛電動汽車的電池容量為32 kW·h。慢充和快充方式下的充電功率分別設為3.2 kW,15 kW。此外,2座風電場分別接在節點17,21,2座太陽能充電站則分別接在節點3,24。
3.1 電動汽車有序充電調度結果
對典型日20座電動汽車充電站的充電狀態進行模擬。不同充電模式下的電動汽車滿充率如表1所示。C0,C1,C2,C3分別表示無序充電模型、時間-有序充電模型(考慮充電時間優化的有序充電模型)、時間-地點有序充電模型(考慮充電時間和充電地點優化的有序充電模型)和時間-地點-方式有序充電模型(同時考慮充電時間、充電地點優化和充電方式的有序充電模型)。
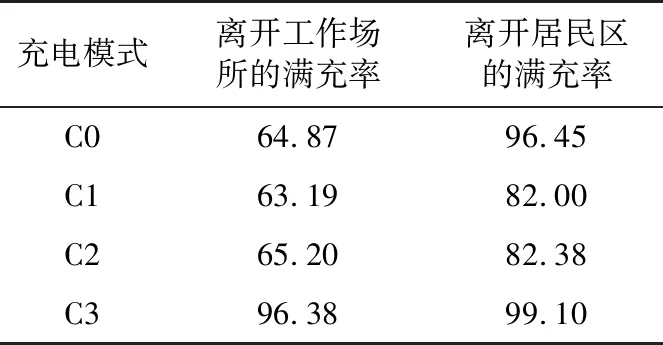
表1 不同充電模式下的滿充率Table 1 The fully-charged ratio in different charging modes %
由表1可知,C1模式中的滿充率比C0模式小,這與用戶對充電價格的響應機制有關。由于對較低充電價格的傾向性,同一充電站的用戶很可能在某個時間段內集中充電,因此早到的用戶提前占用了充電樁,進一步降低了滿充率。為解決這一問題,在電動汽車智能調度系統中,引入充電地點和充電方式的優化,滿充率顯著提高,見C2,C3模式。
在電動汽車智能調度系統中,比較不同的充電時間、充電位置和充電方式帶來的影響,如圖4所示,20種顏色的曲線代表20個充電站分別對應的充電汽車數量。
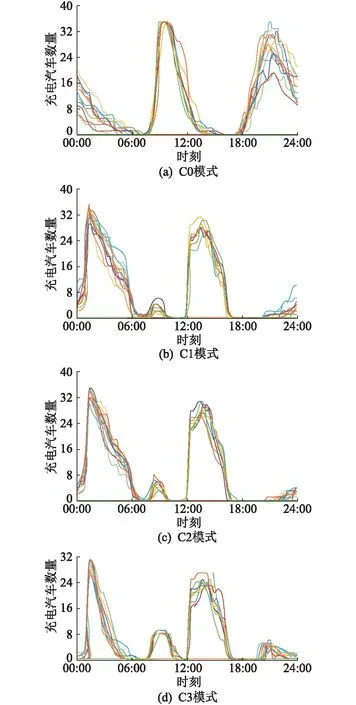
圖4 不同充電模式下的電動汽車充電站狀態Fig.4 The status of electric vehicle charging stations in different charging scheduling modes
由圖 4可知,當充電模式為C1,C2,C3時,電動汽車充電時間段較為分散,與C0模式明顯不同。表明當前的調度方法可以分散用戶的充電時段,顯著減緩電動汽車充電的擁擠問題,也說明電動汽車智能調度系統可為充電站建設提供指導意見。
此外,文中就電動汽車智能調度系統對日負荷曲線的影響進行分析,如圖5所示。由圖5可知,引入電動汽車智能調度系統后,充電時段可有效分散,起到了削峰填谷作用。
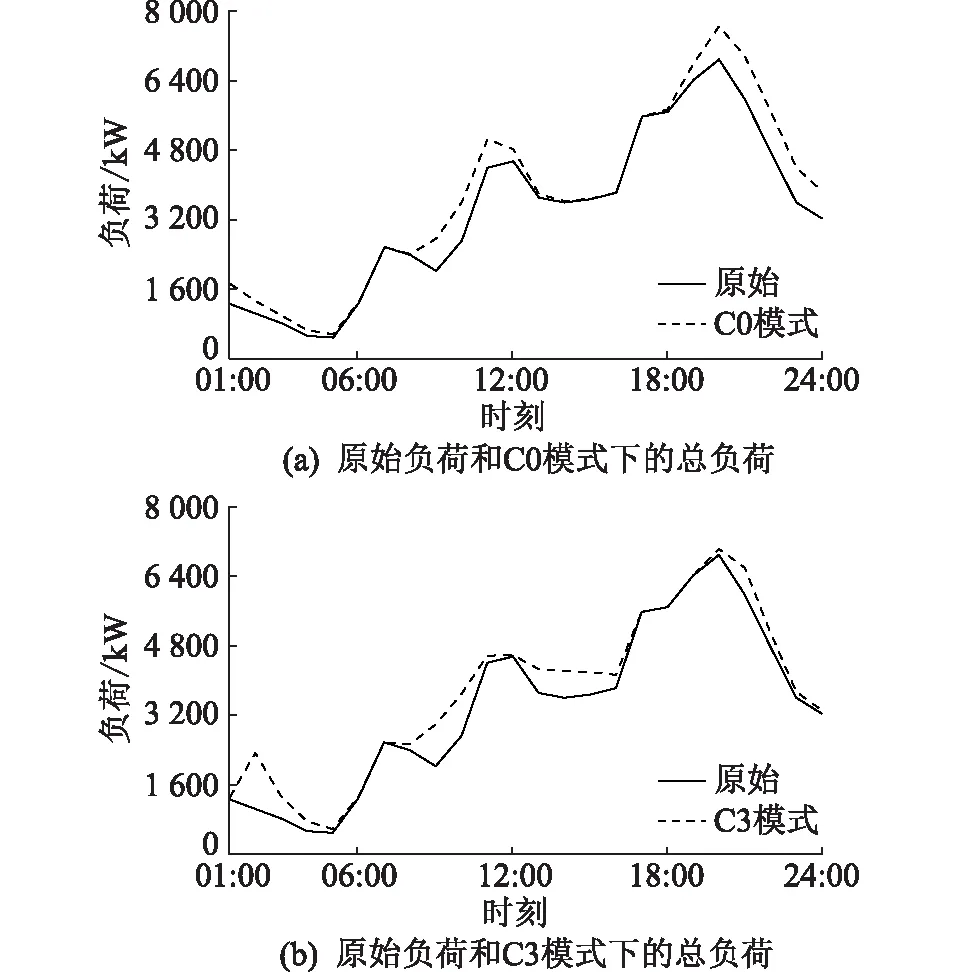
圖5 不同充電模式下的等效日負荷對比Fig.5 The comparison of daily load under different electric vehicle charging modes
根據指標結果計算,在引入電動汽車優化調度系統后,電動汽車充電成本降低,滿充率提高,用戶滿意度明顯上升。同樣,曲線標準偏差減小,曲線變得更加平滑。
3.2 DG和網絡結構調度結果
該調度階段的總負荷為經過電動汽車有序充電調度階段優化后的負荷。假設3個微型燃汽輪機分別接在節點12,23,31,(1)—(32)為常規開關,(33)—(37)為聯絡開關。開關狀態、微型燃汽輪機輸出功率以及階段二調度前后的U(t)分別如表2、圖6和圖7所示。
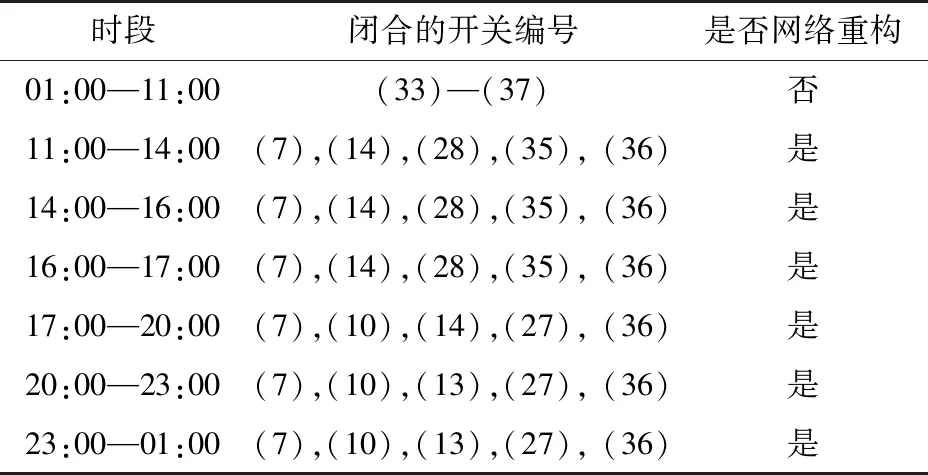
表2 開關和網絡重構狀態Table 2 The Status of switch and network reconfiguration
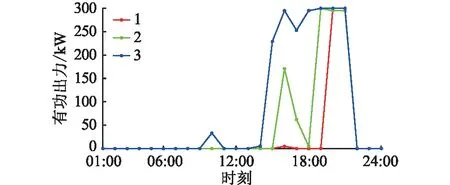
圖6 微型燃氣輪機輸出功率Fig.6 Outputs of microturbines

圖7 DG和網絡結構調度階段前后的U(t)Fig.7 U(t) before and after DG and network structure scheduling stage
由表2可知,3次網絡重構分別發生在11:00,17:00,20:00。由圖6可知,微型燃氣輪機在10:00,14:00—21:00啟動,優化了ADN的運行。由圖7可知,除了20:00,21:00的U(t)不達標外,其余時刻的U(t)在DG和網絡結構調度階段優化后達到了100%,ADN評估體系中幾乎所有指標參數(除了開關動作成本)均得到提升。
3.3 可中斷負荷調度結果
在前述兩階段的優化調度后,20:00,21:00的U(t)未達到100%。因此,采用了第三階段的可中斷負荷調度。假設優先進行電動汽車切負荷操作。在20:00和21:00閉鎖充電樁后,雖然總負荷有所減少,但U(t)仍未達到100%。因此繼續執行可中斷負荷調度操作,20:00和21:00切除的負荷分別為269.82 kW,440.71 kW,此操作后U(t)從90.91%提高至100%。
3.4 ADN調度結果評估
根據文中所提建模和分析方法,多階段調度優化后的最終結果見表3。
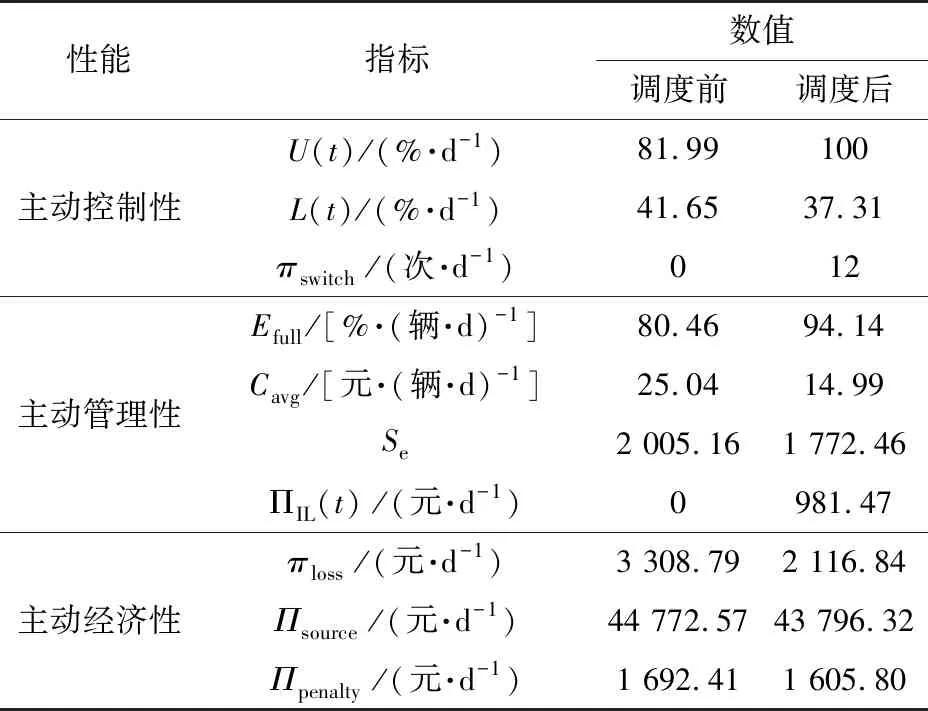
表3 ADN多階段調度優化結果Table 3 ADN multi-stage scheduling optimization results
由表3可知,在主動控制性上,U(t)從81.99%/d提高至100%/d;L(t)在通過網絡重構、可中斷負荷優化后,從41.65%/d降低至37.31%/d。在主動管理性方面,電動汽車用戶滿意度水平提升;等效日負荷曲線在電動汽車優化調度系統和切負荷的操作下,變得更加平滑。同時,經濟成本顯著降低,主動經濟性得到提升。πloss從3 308.79元/d減少至2 116.84元/d;Πsource從44 772.57元/d降低至43 796.32元/d;Πpenalty從1 692.41元/d降低至1 605.80元/d。
4 結論
文中提出了一種計及電動汽車智能充電策略的ADN多階段優化調度模型。首先,從主動控制性、主動管理性和主動經濟性角度出發,建立了ADN的綜合評估體系。其次,綜合電動汽車智能充電策略、DG優化、網絡重構以及切負荷等手段,以ADN性能評價體系為優化方向,構建了ADN的三階段優化調度模型。最后,對該多階段優化調度模型進行了仿真,并分析了該模型對ADN優化調度的有效性。文中研究表明:
(1) 電動汽車智能調度系統對于電動汽車用戶滿意度的提升有明顯的促進作用。同時,在高比例間歇性能源接入電網的場景下,該系統能夠有效削峰填谷。
(2) 構建的ADN性能評估指標涉及主動控制性、主動管理性和主動經濟性,可用作ADN性能的量化評估。
(3)在ADN的性能評估體系基礎上搭建的多階段優化調度模型,可用于指導當前ADN源、網、荷側的規劃、調度和運行。
本文得到國網江蘇省電力有限公司科技項目(J2019054)資助,謹此致謝!
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
商用汽車(2016年11期)2016-12-19 01:20:16
光學精密工程(2016年6期)2016-11-07 09:07:19
商用汽車(2016年6期)2016-06-29 09:18:54