三維激光掃描測量技術在規劃核實測量中的應用探索
2021-06-18 10:33:16楊新成
現代礦業 2021年4期
楊新成
(安慶市勘察測繪院)
三維激光掃描測量技術是20世紀90年代出現的一項高新技術,他通過主動發射高速激光對目標物體進行掃描,通過收集回波完成測量過程[1]。地面三維激光掃描測量技術是基于地面固定站,通過發射激光獲取被測物體表面三維坐標、顏色、反色率和對光的吸收特性等多種信息,是一種全新的非接觸式主動測量技術。傳統的規劃核實測量是基于全站儀采集建筑物主要特征點的三維坐標,然后外業人工丈量建筑物有關細部尺寸,形成建筑物竣工驗收規劃核實測量成果數據,并將其在1∶500竣工圖上進行表達。傳統方法測量效率低,制圖工作量大,難以滿足快節奏的工程需求[2];地面三維激光掃描測量技術具有掃描精度快、實時性強、精度高、主動性強等優點,能大幅提升作業效率,是繼GPS測量技術之后的又一次測繪領域技術革命,目前在工程建設、測量等相關領域有著廣泛的應用前景。已經有測繪生產單位就三維激光掃描技術在工程建設或竣工階段中的測繪工作進行了探索性應用[3]。本研究結合工程案例,分析地面三維激光掃描測量技術在規劃核實測量中的應用效果。
1 工程概況及技術指標
1.1 工程概況
某房產開發項目工程已竣工,進入規劃驗收環節,需要進行規劃核實測量,獲取建筑物的首層室內地坪高、建筑物頂部高程以及建筑物的位置、長寬、地形地貌等數據,最終提交1∶500竣工圖。竣工圖范圍包括10棟建筑物及周邊道路等,具體如圖1所示(圖中①~⑩為待掃描建筑物)。

1.2 技術指標
根據《城市測量規范》要求[4],建筑物竣工驗收規劃核實測量的主要技術指標如下。
(1)最終竣工圖的主要地物點(涉及規劃要素的地物點)相對鄰近圖根點的點位中誤差不應大于0.05 m,次要地物點相對鄰近圖根點的點位中誤差不應大于0.07 m,地物點間距中誤差不應大于0.05 m,困難地區地物點相對鄰近圖根點的點位中誤差和地物點間距中誤差不應大于0.1 m。
(2)間距>50 m的規劃要素點、地物點間距誤差限差不應大于0.1 m,間距≤50 m的規劃要素點、地物點間距誤差ΔD限差不應大于式(1)的計算結果,困難地區間距誤差限差為2倍中誤差。

式中,D為邊長,D≤50 m。
(3)建筑物頂部高程誤差不應大于0.10 m。
(4)竣工建筑相關的高程測量精度:注記點(建筑物首層的室內外地坪高程)相對于鄰近圖根點的高程中誤差不應大于0.03 m;其他主要地物高程點相對鄰近圖根點的高程中誤差不應大于0.04 m。
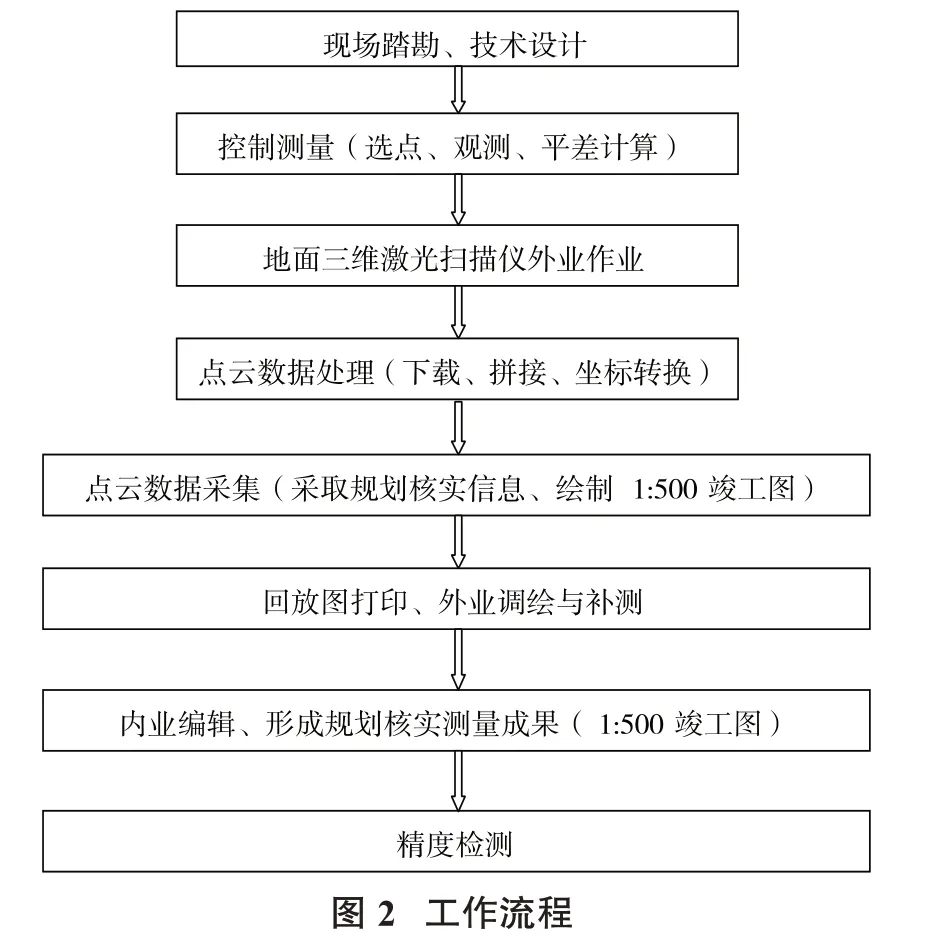
2 作業流程
接受委托任務后,按照圖2工作流程進行作業組織和實施。
3 控制測量
為保證工程精度,根據技術規程要求[5],在測區周邊和小區內部布設了33個控制點,平面按照III級導線的精度、高程按照圖根三角高程的精度進行觀測。經過導線平差,成果滿足規范要求。控制點位置見圖3。
4 地面三維激光掃描
采用徠卡RTC360型三維激光掃描儀,運用其獨有的VIS視覺追蹤技術實現自由架站掃描,無需整平,放穩即測,2個多小時可完成掃描60個站點,完成需要測量的10棟建筑物及周邊道路等地形、地貌的數據采集。在掃描儀可視范圍內的控制點上架設標靶,為后期坐標系統轉換提供條件。三維激光掃描儀架站點位布置情況見圖4。
外業架站掃描結束后,在圖形工作站上下載點云,并進行點云拼接、數據采集等數據處理。
5 數據處理及精度分析
數據處理主要包括4個部分:點云下載、點云拼接、坐標轉換、點云數據采集。
5.1 點云下載及拼接。
點云下載和拼接均使用Leica Cyclone軟件,點云采用視圖拼接的方法,先進行自動拼接,然后根據拼接報告,選擇拼接誤差較大的點云再進行拼接優化,最終點云的拼接誤差(mP)平均值為0.02 m。
5.2 坐標轉換
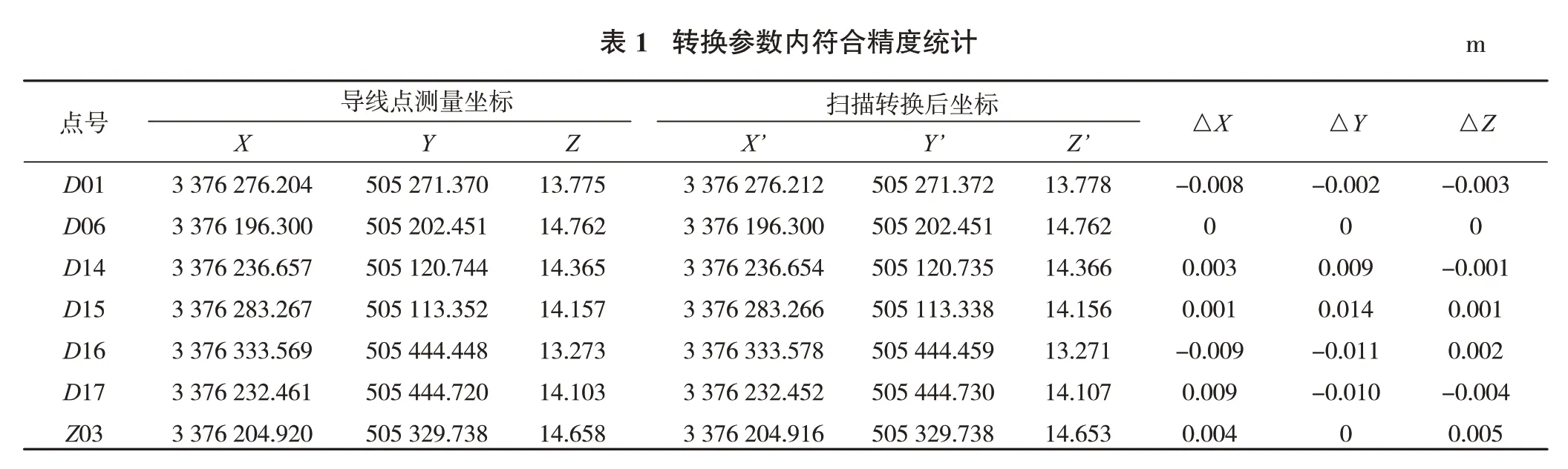
因采取的是自由架站的方式進行掃描,最終獲取的點云數據屬于自由坐標系下的數據,需要通過提取掃描的控制點點云坐標與同名點導線測量的坐標進行匹配轉換,得出具有CGCS2000坐標系和1985國家高程基準的點云數據。本項目共掃描到了20個導線控制點,采用七參數法,經過優化組合,最終選擇7個導線控制點進行坐標轉換參數計算,7個點位見表1。
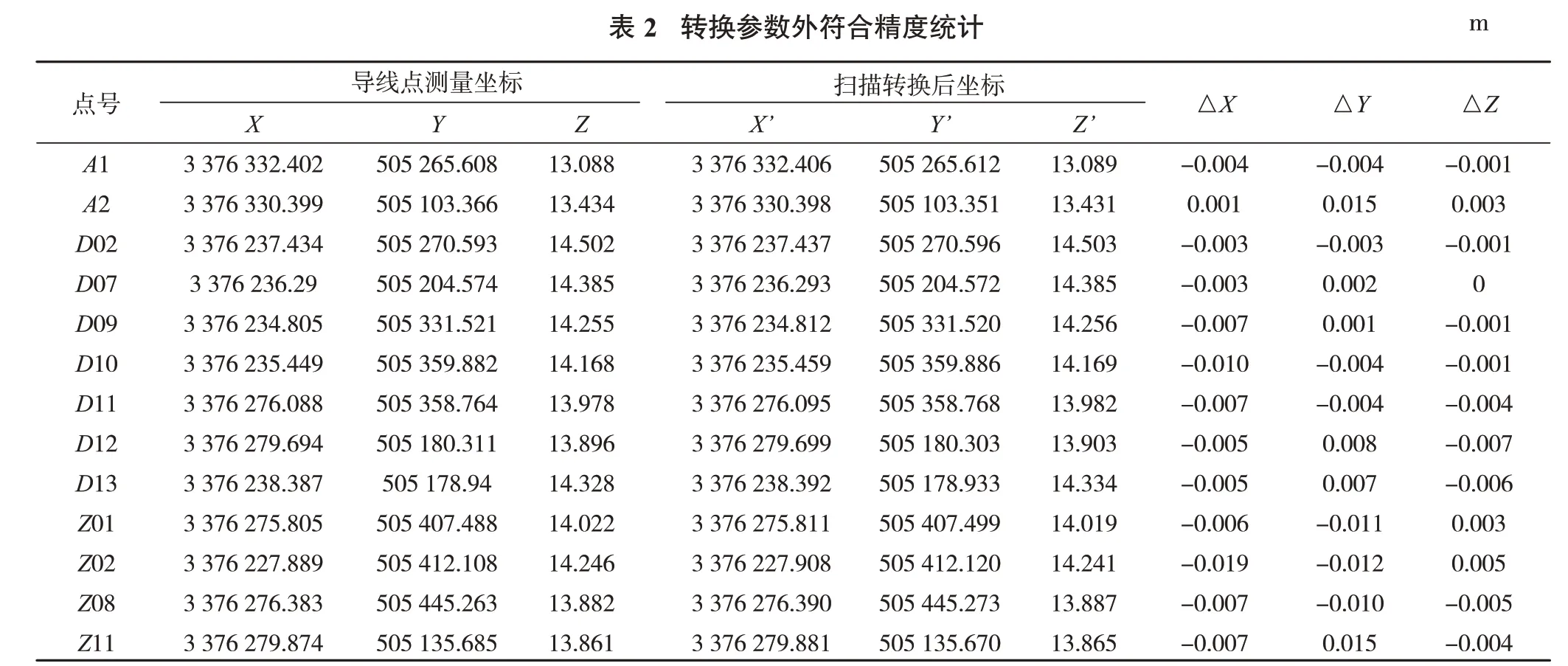
經過計算分析,由表1可得轉換參數的平面內符合精度為0.011 m,高程內符合精度為0.003 m;同時對其他13個未參與轉換點也進行精度評定,由表2可得轉換參數的平面外符合精度(mW)為0.012 m,高程外符合精度為0.004 m。
5.3 點云數據采集
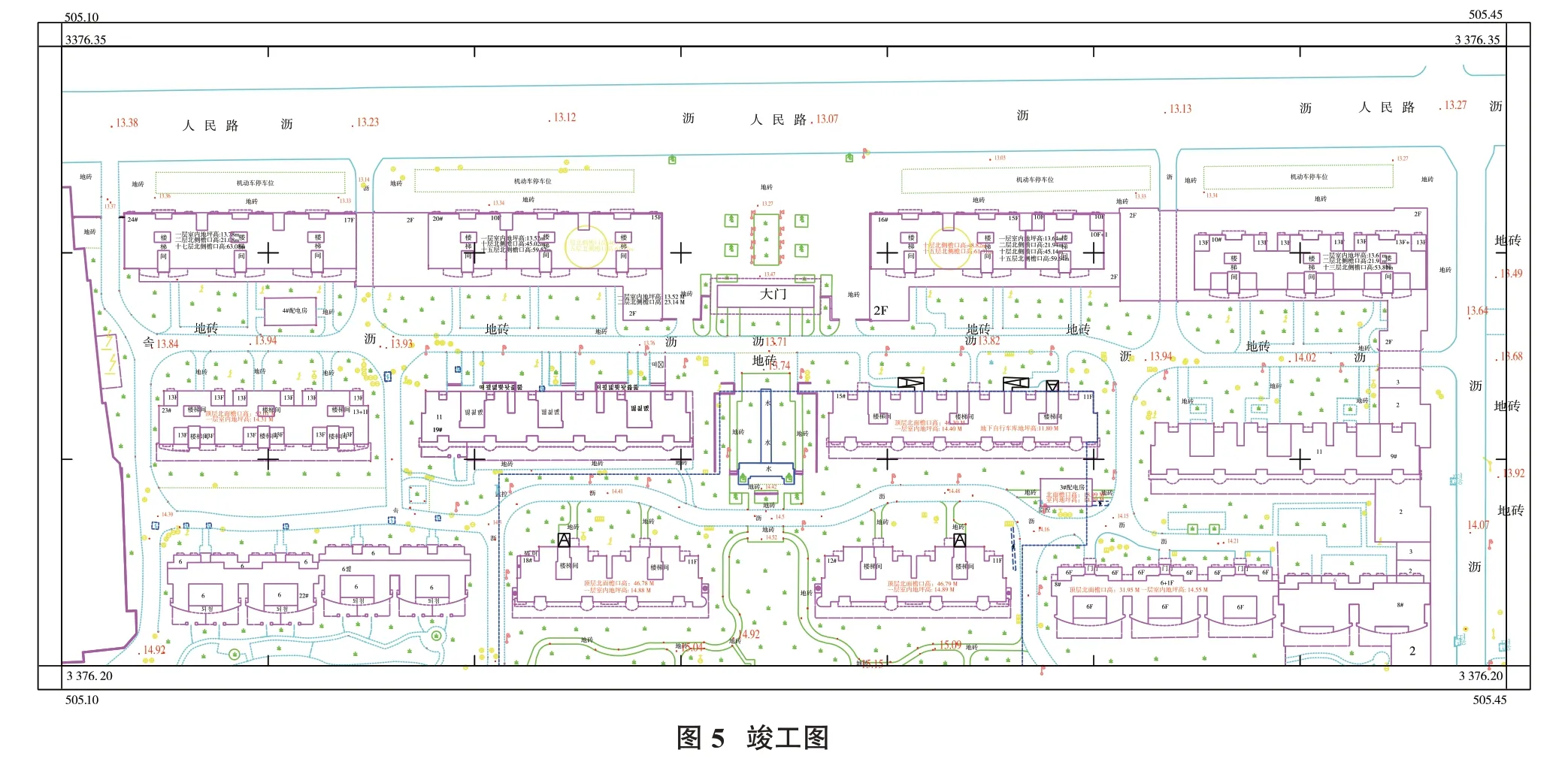
將坐標轉換后的點云進行數據格式轉換,在CAD高版本中進行點云數據采集,提取規劃核實數據,繪制1∶500竣工圖,見圖5。經統計點云的厚度最大為0.01 m,所以點云采集的精度(mC)按0.01 m進行精度統計。
5.4 點云精度統計
根據前述數據處理階段各個環節的精度情況,進行誤差統計和分析,最終竣工圖的主要精度包括點云拼接精度、坐標轉換精度、點云采集精度3部分,根據式(2)計算點云成果1∶500竣工圖的平面最終精度m為0.025 m。

?
?
6 精度檢測
數據采集完成并經過外業調繪和補測后,對最終1∶500竣工圖成果中的主要地物進行絕對精度、相對精度、高程注記點精度、建筑物頂部高程精度等進行外業檢查。檢查使用徠卡TS02(5")型全站儀,在導線點上架站,利用無棱鏡采集地物點的坐標和內部道路上的高程,以及建筑物頂部的高程值。根據全站儀采集的數據和外業丈量的值,與點云成果線劃圖中對應的值進行逐項比較。
6.1 點位精度
隨機選取全站儀采集的30個點位坐標與點云成果1∶500竣工圖中對應的點位坐標進行比較,數據見表3。
由表3統計分析可得,利用三維激光掃描儀取得的地物點位置中誤差為0.015 m,滿足主要地物點中誤差不應大于0.05 m、次要地物點中誤差不應大于0.07 m的要求。
6.2 間距中誤差
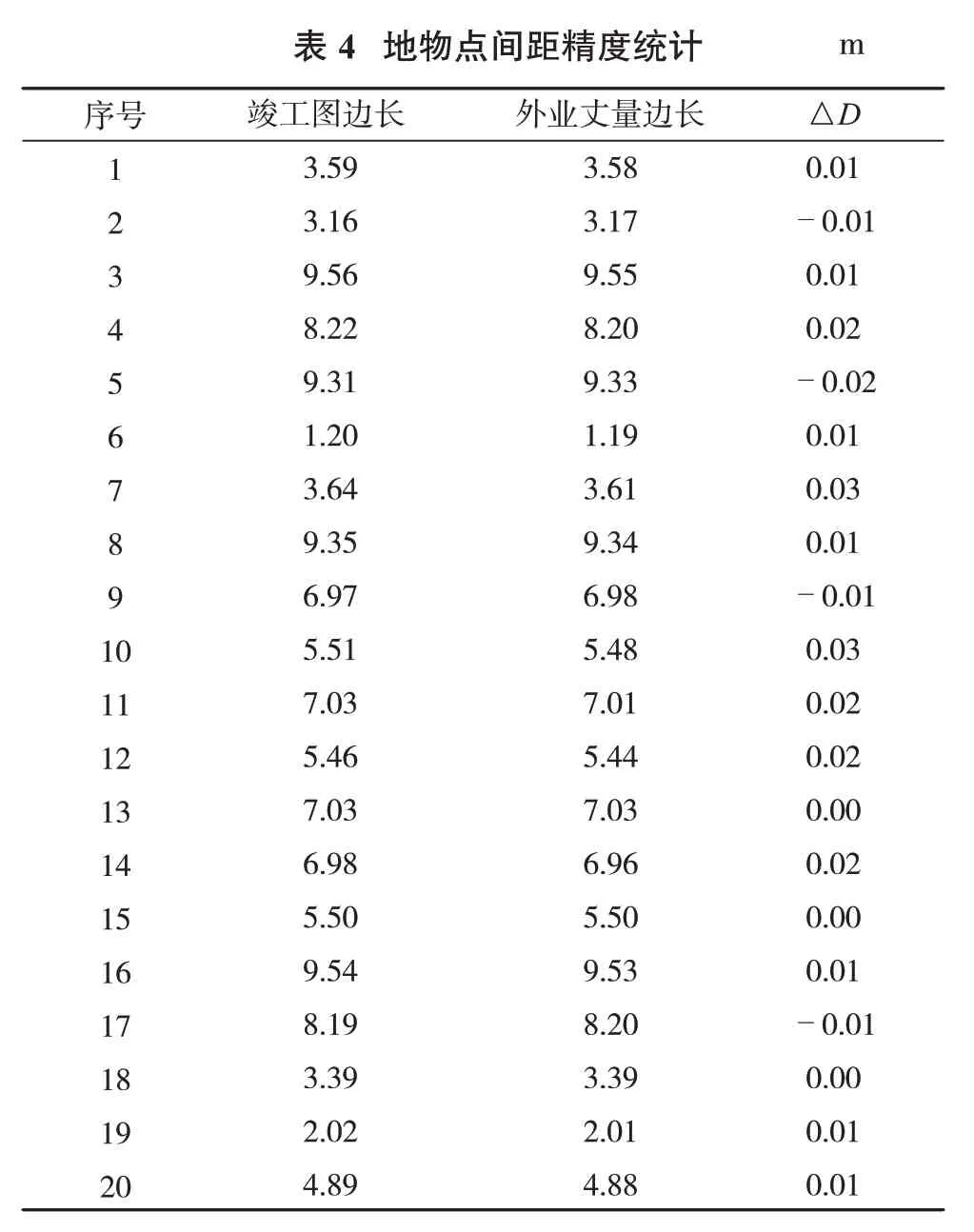
將外業丈量的20個建筑物邊長與1∶500竣工圖對應的建筑物邊長進行比較,數據計算見表4。
由表4統計分析可得,利用三維激光掃描儀取得的地物點間距中誤差為0.008 m,滿足地物點間距中誤差不應大于0.05 m的要求。
6.3 高程測量精度
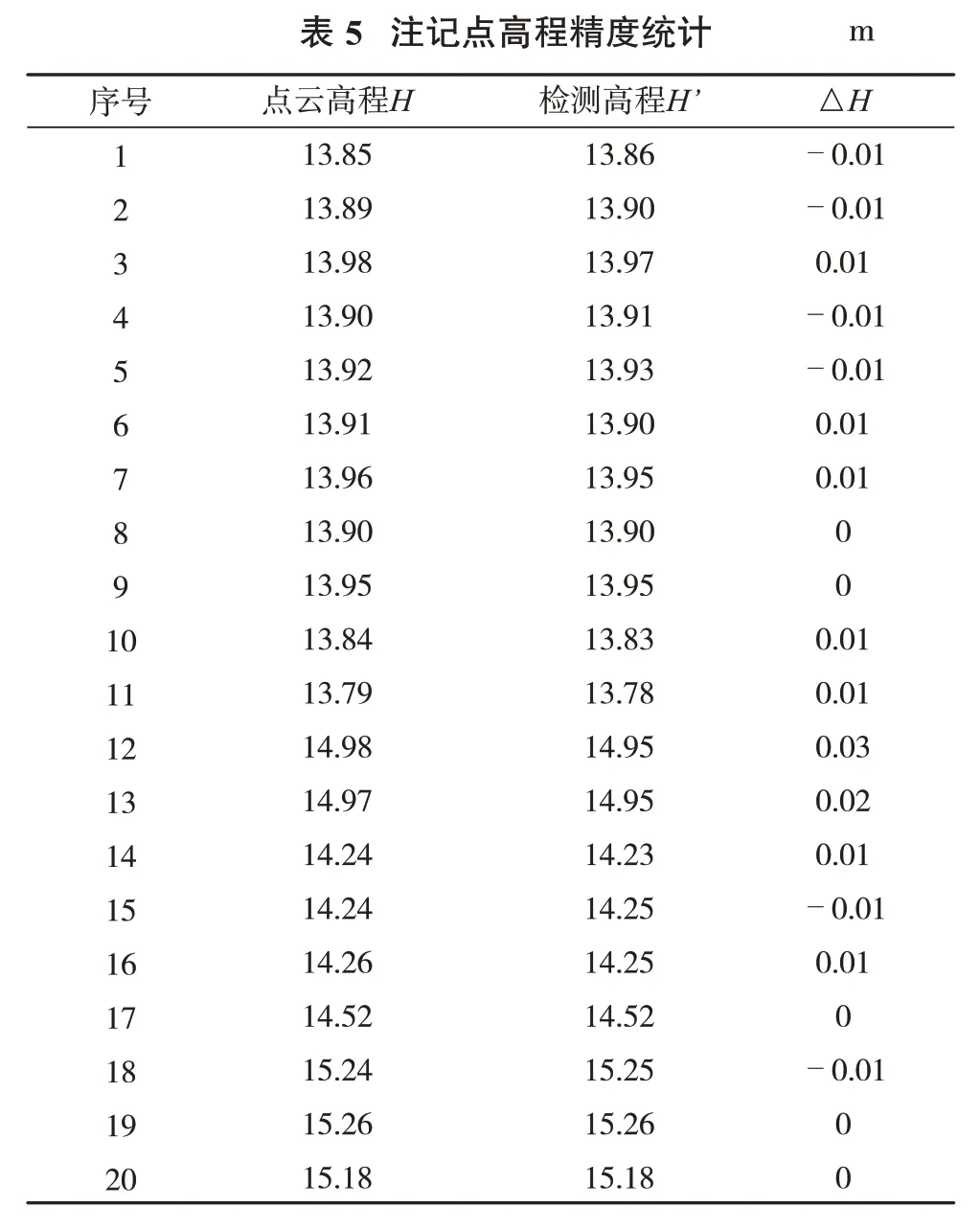
1∶500竣工圖中的高程是直接根據點云成果在相應的位置注記,利用全站儀隨機測量了20個高程值,與點云的相應高程進行比較,結果見表5。
由表5統計分析可得,利用三維激光掃描儀取得的注記點高程中誤差為0.01 m,滿足主要地物高程點中誤差不應大于0.04 m的要求。因現場環境影響,三維激光掃描作業環節未對建筑物首層室內地坪進行掃描,但通過表5分析結果可以推斷,通過三維激光掃描技術取得的首層室內地坪高程中誤差≤0.03 m。
6.4 建筑物頂部高程精度
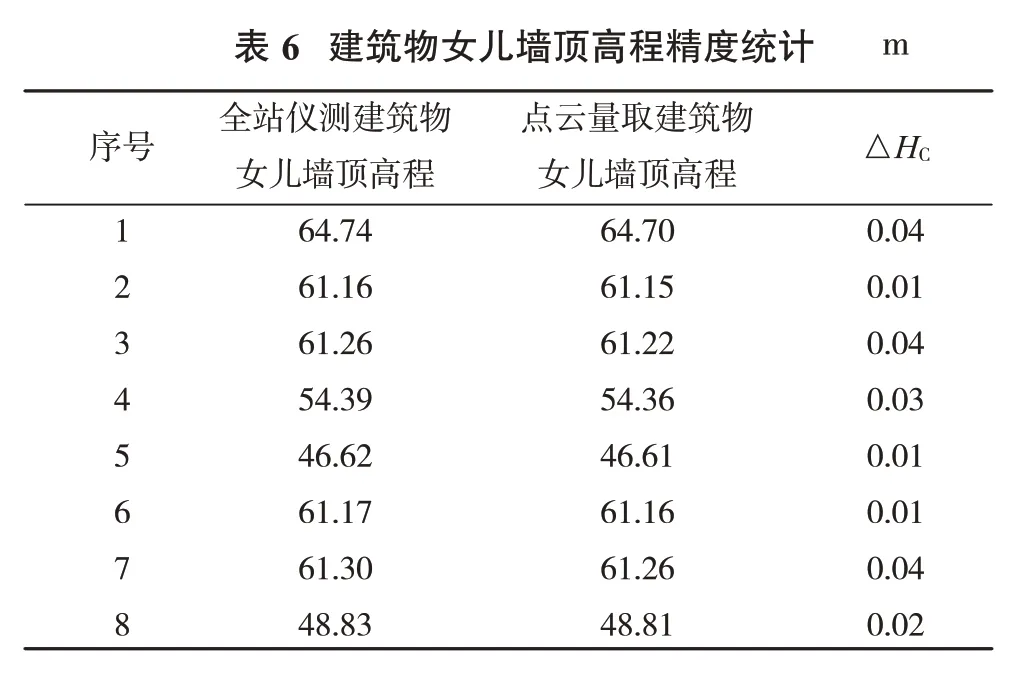
根據點云成果在建筑物女兒墻頂位置直接注記建筑物頂部高程,利用全站儀測量建筑物相應女兒墻位置的高程值,二者進行比較,見表6。
由表6統計分析可得,利用三維激光掃描儀取得的建筑物頂部高程中誤差為0.02 m,滿足建筑物頂部高程誤差不應大于0.10 m的要求。
7 工作效率對比
工程結束后,對三維激光掃描技術和常規的全站儀技術進行效率評估和對比,結果見表7。
表中全站儀技術的工作效率是根據其他工程進行推算得到,地面三維激光掃描技術屬于初次使用,操作還不夠熟練。表中的結果僅為參考,但地面三維激光掃描技術效率高是行業公認的事實,并且減少了外業勞動強度,提高了生產力。
?
?
通過點云精度分析可以得知,基于地面三維激光掃描技術取得的點云成果,影響其精度主要是點云拼接精度、坐標轉換精度以及點云數據采集精度,本案例采用視圖拼接模式,如果采用標靶進行點云數據拼接,可以提高三維激光掃描技術的成果精度[6]。
?
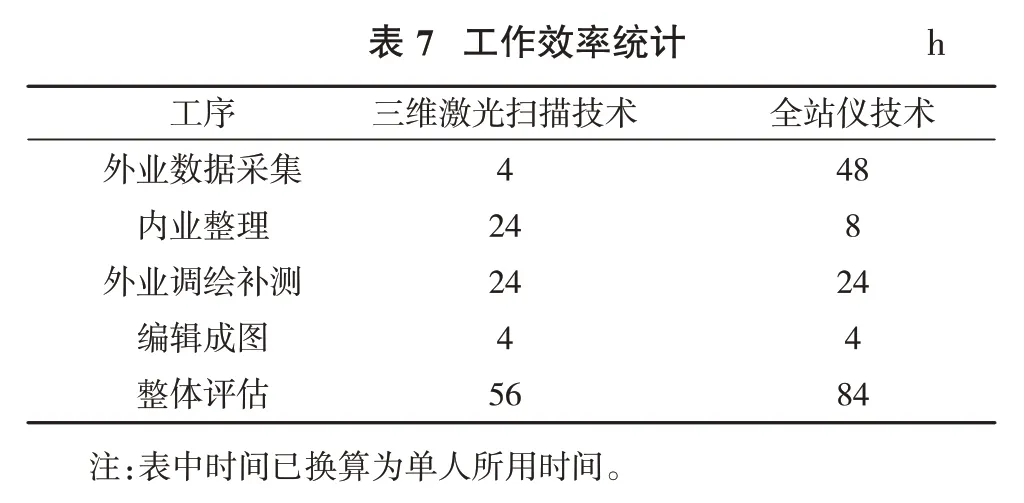
注:表中時間已換算為單人所用時間。
8 結語
規劃核實測量中利用地面三維激光掃描技術可以主動地獲取建筑物表面的三維點云數據,通過點云數據處理可以為規劃監督管理部門提供高質量的測量成果,相比于傳統測繪的測量方式,主要優點有獲取數據的采用頻率高、通過非接觸測量降低安全風險、效率高、成果精度可靠。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
