某純電動物流車高效轉矩控制算法的研究
2021-06-20 22:59:37劉朝吉王紹菲馬巍凌張文杰李清
汽車科技 2021年3期
關鍵詞:效率
劉朝吉 王紹菲 馬巍凌 張文杰 李清

摘 ?要:為了研究某種純電動物流車轉矩控制算法對汽車經濟性影響,本文基于理論與試驗數據,針對關鍵零部件建立了MATLAB/Simulink計算模型,以降低汽車系統的能耗為目標,提出了一種高效轉矩控制算法。通過不同行駛工況下的仿真和道路試驗進行對比分析與驗證,結果表明,與原轉矩分配算法相比高效轉矩分配算法的系統能耗可降低5%以上。
關鍵詞:純電動物流車;轉矩控制策略;能耗;效率
中圖分類號:TP391 ? ? ?文獻標識碼:A ? ? 文章編號:1005-2550(2021)03-0073-08
Research on High-efficiency Torque Control Algorithm of a Pure Electric Logistics Vehiclec
Liu Chao-ji1, Wang Shao-fei1, Ma Wei-ling2, Zhang Wen-jie2, Li Qing2
( 1.Dongfeng Special Vehicle Co., Ltd., Shiyan ?442012, China;
2. Dongfeng VASOL Motor Co., Ltd., Shiyan ?442001, China )
Abstract: In order to study the influence of torque control algorithm of a pure electric logistics vehicle on vehicle economy, this paper establishes a MATLB/Simulink calculation model for key parts based on theoretical and experimental data, and proposes an efficient torque control algorithm with the goal of reducing the energy consumption of vehicle system. Through the comparative analysis and verification of simulation and road tests under different driving conditions, the results show that the system energy consumption of the high-efficient torque distribution algorithm can be reduced by more than 5% compared with the original torque distribution algorithm.
Key Words: Pure Electric Logistics Vehicle; Torque Distribution; Energy Consumption; Efficiency
劉朝吉
畢業于湖北汽車工業學院,學士學位,現就職于東風特汽(十堰)專用車有限公司,任副總經理,主要從事新能源專用車底盤設計研究。已發表論文 《純電動物流車電機懸置支架結構優化設計》。
引 ? ?言
針對世界能源危機及環境惡化問題,發展節能環保安全的電動汽車是解決未來能源、環境問題及實現主動安全的最有效措施之一,在世界范圍內得到高度重視。然而,目前純電動汽車續駛里程短并且充電時間長成為影響其發展的瓶頸問題[1]。純電動汽車是一個集機械、電氣、控制等為一體的非線性動態系統,想要達到低能耗、低排放,設計合理的、完善的控制策略是非常重要的[6]。針對汽車控制領域,降低能量消耗的控制策略目前的研究應用主要有三種方法:
1)高效的驅動控制策略;調節控制動力系統在效率最高的區域工作,是提高整車運行效率的一種有效方法。
2)再生制動能量回饋策略;在車輛滑行或行車制動過程中,控制電機系統發電,即提供一部分制動力,又對動力電池充電,提高汽車整車能量的利用率[7]。
3)適當的降低動力輸出策略;降低動力輸出能力,同時也降低了動力電池放電倍率,間接增加動力電池的放電時間和放電量,從而延長車輛的續駛里程[2]。其中,再生制動能量回饋策略和降低動力輸出策略研究廣泛,具有充分的理論與試驗數據支持,能明顯取得良好的節能效果。因此,本文針對其中之一的高效的驅動控制算法進行研究。
目前,在混合動力汽車中應用控制轉矩分配的方法來降低系統能耗的研究較多,通過確定發動機與電機間的轉矩分配來提高車輛的等效燃油經濟性[3]。而對于純電動車輛,尤其是能耗較大的商用車的電機轉矩驅動控制策略研究很少,沒有針對性的理論和試驗數據統計。因此,本文選取了某型號的一款廣泛應用的純電動物流車,該款物流車的動力系統采用直驅方式,因此對電機系統轉矩進行有效調節和控制輸出尤其是轉矩優化控制即可實現功率的優化。本文通過物理模型搭建,控制策略設計,仿真驗證以及真實道路試驗驗證等環節,驗證其降低能耗的作用,從而驗證了控制策略的正確性與合理性。
1 ? ?純電動物流車整車結構
圖1是本文選用的某公司生產的某型號的暢銷區域短途廂式純電動物流車,其配置參數如表1所示:
該車底盤采用6米底盤,制動系統采用液壓制動方式。為了提高傳動效率,便于底盤布置等,動力系統采用直驅方式,動力系統結構如圖2所示(修改圖2名稱車輛動力系統結構圖)。動力系統的三大關鍵部件包括整車控制器、動力電池及其管理系統、電機及其控制系統。
2 ? ?模型搭建
根據系統結構,建立控制系統模型,將目標車速與實際車速的偏差值作為輸入量,駕駛員模型實時計算輸出需求轉矩,包括驅動轉矩與制動轉矩,經過整車動力學模型得到實際車速,并與目標車速比較形成閉環負反饋控制,控制系統模型結構流程圖和系統仿真模型如圖3所示。該仿真系統包含:駕駛員控制模型和整車動力學模型;其中整車動力學模型包含:車輛動力學模型和電池SOC計算模型。
2.1 ? 駕駛員模型
駕駛員模型主要包括加速踏板、制動踏板、電機轉速等輸入變量,以及循環工況控制模型。縱向駕駛員模型用于車輛縱向速度的控制,它根據目標車速和當前車速計算油門踏板開度和制動踏板開度,輸出需求轉矩。如圖4(a)為加速踏板開度百分比與輸出要求轉矩百分比的對應關系;如圖4(b)為制動踏板開度百分比與輸出要求轉矩百分比的對應關系。
2.2 ? 動力學模型
純電動車在行駛過程中,滿足汽車行駛動力學方程式。車輛縱向加速度與驅動力及行駛阻力的關系式(1)如下:
式中 Fdr為來自電機的驅動力, FBrk為制動系統的制動力,Fw為風阻,Ff為滾動阻力,Fslop車重在坡道方向的分力,M為汽車總質量,a為汽車的加速度。
式(2)中FBrkmax為最大制動力,ηBrk為制動踏板開度,TBrkmax 為最大制動力矩,RTire為輪胎半徑。
式(3)中Fw為風阻,其與車速v、迎風面積A和風阻系數Cw有關;
式(4)中 Ff為滾動阻力,與滾動阻力系數f有關,f與車速v有關,同時車輛與路面間的垂向作用力考慮了坡度α的影響;
式(5)中Fslop車重在坡道方向的分力,與坡道α和車重mg有關。
2.3 ? 電池模型
電池模塊基于Rint等效電路模型建立,將電池等效為一個理想電壓源U和等效內阻R串聯而成。電池輸出電壓計算公式:
式(7)中Uvoc為理想電壓源電壓,即電池的開路電壓,Rint為等效充放電內阻。
模塊輸入為外部需求功率P,根據此功率需求計算電池當前電流,計算公式推導如下:
由上述公式進而計算出電池電流I0:
式(8)中Uvoc和R分別為電池的開路電壓和內阻,P為外部功率需求,U0、I0分別為電池的電壓和電流。在充電時需求功率P和電池電流為負值,放電時需求功率和電池電流為正值。 電池模型中的SOC采用積分法計算:
式(9)中積分器初始值為InitSOC,η和CapacityBattery分別代表庫倫效率和電池總容量。
2.4 ? 能耗計算模型
在行駛工況下,系統瞬時耗能:
式(10)中T是電機輸出轉矩;n是電機轉速;η是電機效率。其中驅動電機效率隨轉矩和轉速動態變化,具有非線性特性。
相對于理論計算,臺架試驗結果更加準確,因此本次試驗中建立如圖5(a)所示的驅動電機效率測試臺,分別測定其在不同轉速、轉矩下的驅動效率MAP圖,其測試結果如圖5(b)所示。因此,該仿真模型應用臺架試驗的測試結果的插值計算結果來實現仿真運行。
3 ? ?高效轉矩控制策略
轉矩控制是整車控制系統功能的關鍵控制技術之一,該技術主要是根據駕駛員的駕駛意圖和整車狀態,對電機系統轉矩進行有效調節和控制輸出[4]。如下圖6所示,完整的電機轉矩控制方案主要由輸入信號、轉矩需求、轉矩算法、轉矩調整以及轉矩限制這幾個部分組成。本節僅針對轉矩算法進行研究,設計了一種高效轉矩控制算法,旨在提高電機控制效率,從而降低電量耗散,提高能量利用率,從而達到節能降耗的設計目標。
3.1 ? 轉矩控制算法
設計轉矩控制算法時,最關鍵的環節是不僅要滿足駕駛員的駕駛需求,還需要制定控制策略讓動力系統(主要是電機)工作在其高效區域,這樣才能有效提高電機的使用效率,有效延長電動車的行駛里程。本節根據已經搭建的整車模型,電機的實時轉速為輸入量,通過試驗測試得到的電機效率表為查表數據,根據輸入量查詢獲取對應轉速下的最大驅動力矩;而加速踏板的開度和開度的變化率,可以間接推斷駕駛意圖,整車控制器可以結合當前動力電池組的SOC 狀態,計算得到驅動補償力矩。詳細的控制邏輯為整車控制器根據辨識的意圖選擇最佳的驅動模式,計算出對應的驅動電機轉矩負載系數,然后得出滿足駕駛員駕駛需求的驅動力矩值,最后通過總線將該需求指令發送給電機控制器,完成驅動策略控制指令的輸出。在實際制定電動車的控制策略時,受到多方面條件的制約,首要原則之一就是在車輛及各子系統性能限制條件下,安全高效地進行驅動力矩的控制。轉矩控制算法流程圖見圖7:
如圖7所示,高效轉矩算法首先根據當前MCU 輸入轉速進行電機效率MAP三維曲面的轉化,轉化為對應固定轉速的二維曲線,得到轉矩與電機效率的對應關系。其次根據線性差值法計算,可以得到該曲線上的最高效率點ηmax,以及對應的最大效率轉矩T1。最后根據當前電機轉矩T,計算出該曲線上對應的電機效率點η,對比實際效率η與最大電機效率ηmax。若相等,則不進行任何轉矩補償,輸出補償值為0。若不相等,則計算補償值△T=|T- T1|,并判斷T與T1之間的關系,若T> T1,則輸出T2=T-△T;若T< T1,則輸出T2= T +△T,最后轉矩平滑處理后,輸出給MCU。
在轉矩控制算法中,針對電機效率的計算方法使用的是線性插值法,對電機效率MAP表的插值。電機效率MAP圖表是電機在驅動電機效率測試臺上真實測試的結果,見2.4節。因此,當測量值是準確的,沒有誤差時,采用插值法是最快捷準確的。插值是離散函數逼近的重要方法,利用它可通過函數在有限個點處的取值狀況,估算出函數在其他點處的近似值。計算x點的插值時,只用到x左右的兩個節點,計算量與節點個數n無關。例如在兩點[xi-1,xi]上線性插值函數如式11所示:
3.2 ? 轉矩平滑處理
對于純電動物流車的轉矩變化而言,當增加轉矩補償或者加速踏板開度變化較大時,會由于電機驅動轉矩的突然增加或減小給車輛帶來一定的沖擊,影響駕駛舒適性及動力部件的使用壽命。為了保證轉矩的平穩過渡,提高舒適性,根據對車輛加速度變化率限制進行電機轉矩平滑處理[5]。加速度變化率小于等于m/s3,具體的公式推導如式12所示:
其中,a為加速度,單位m/s2;v為車速,單位m/s;m為整車質量,單位kg;r為車輪半徑,單位m;η為系統傳動效率;T為電機輸出扭矩,單位Nm; i為傳動系變速比。由于整車控制器采樣周期Dt為10ms,同時將整車參數帶入式,可以得出扭矩變化率的上限DT,如式13所示:
行車過程中,將需求電機轉矩T2與上一時刻電機輸出轉矩T1對比,計算變化量DT,如式14所示,根據變化量對進行修正,得到修正后的需求電機扭矩,如式14所示,并將Tout 發送給電機控制器。
通過Matlab仿真得到的轉矩平滑處理結果如圖8所示,該轉矩變化率明顯趨于平緩。
4 ? ?模型仿真及整車試驗
4.1 ? 路試及模型仿真
將純電動物流車道路真實路試數據進行采集,主要是電機的轉速、轉矩以及加速踏板、油門踏板等數據信息,收集固定路線的道路路譜數據。本小節根據實際道路試驗采集到的數據作為數據源進行仿真,驗證上一節中的高效轉矩控制策略是否有效的提高了電機實際效率,將仿真前后的數據進行對比統計,得到策略的驗證結果。
在30km/h平均車速下(由于城市道路限行因素,車輛在市內道路行駛的平均車速接近30km/h),進行道路能耗試驗,現場試驗圖如圖9所示:
根據上述所建立的分布式電動汽車的控制模型,包括駕駛員模型、轉矩分配模型和整車動力學模型等,利用MATLAB/Simulink進行固定比例分配轉矩的控制策略仿真,模型參數見表2所示:
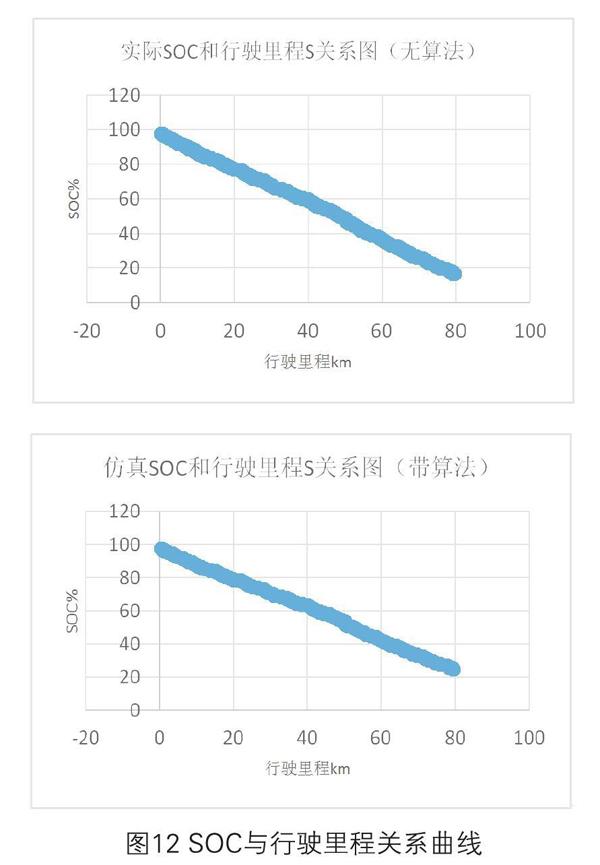
通過路試試驗獲取相關能耗及電機效率等數據,同時與仿真結果比較,參見表3 、圖10、圖11與圖12:
圖10為整車試驗獲取的實際電機效率及模型仿真后的電機效率散點圖,將電機的轉矩轉速散點圖與電機臺架試驗的MAP曲線的橫縱坐標重合,即獲取電機實際效率分布情況。如圖10所示,帶算法仿真后的電機效率點更多的分布在電機MAP圖的高效區間。如圖11所示,電機效率分布對比圖更清晰的表達了電機效率的提高。如圖12所示,相同行駛里程的情況下,仿真曲線SOC的變化率更小,行駛能耗更低。針對路試結果的模型仿真,本節得到該算法的真實有效性,獲得有效的電機效率提升,因此下一節進行實際路試對比試驗,進一步驗證算法的有效性。
4.2 ? 路試結果分析
選取一段固定的城市道路和同一位駕駛員,采用帶算法和不帶算法兩種控制策略,應用在滿載的純電動物流車上,進行路試對比。經實車路況得到結果為應用算法試驗結果和不使用算法能耗試驗對比結果如表4所示:
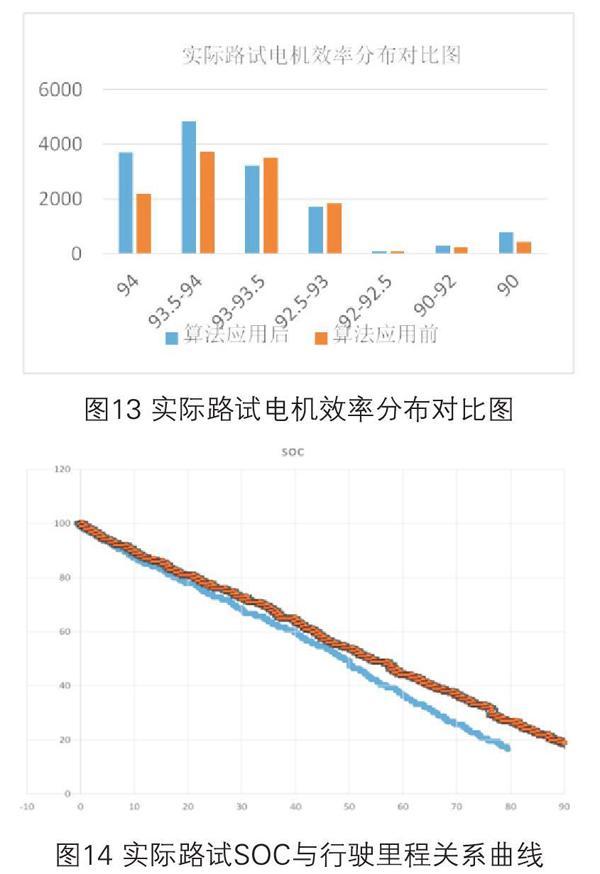
在平均車速30km/h條件下,進行百公里能耗試驗,與前面不用該算法的百公里能耗相比,節能10%以上。實際路試電機效率分布對比圖見圖13,實際路試SOC與行駛里程關系曲線見圖14:
整車路試的結果如圖13所示,帶算法的路試結果顯示電機效率點更多的分布在高效區間。如圖14所示,相同的SOC變化率情況下(100%--16%),帶算法的路試結果的行駛里程接近90km,不帶算法的路試結果的行駛里程接近80km,因此應用算法的條件下,整車的行駛能耗更低。因此本輪路試進一步驗證了該高效轉矩算法的有效性。
5 ? ?結論
本文完成了以下工作:(1)建立了考慮駕駛員模型、動力學模型、電池模型和能耗模型的純電動汽車能耗模型,并通過仿真分析和真實路試試驗對比,驗證了模型正確性。(2)提出基于電機效率MAP優化的轉矩控制算法,在電機轉矩約束條件下,根據行駛工況,實現了驅動系統效率最優的轉矩輸出,有效降低了系統能耗。(3)提出通過在線查表法實現驅傳動系統效率優化,具有算法簡單、實時性強的特點。最終,經過模型仿真驗證算法的可靠性、經過實車路試驗證算法的有效性,最終得出了該算法可以大幅提高電機的使用效率,有效的增加車輛的行駛里程,實現了論文最終的研究目標。
參考文獻:
[1]羅勇,劉莉等.純電動汽車驅動控制策略研究[J]. 重慶理工大學學報(自然科學),2019,33(3):07-14.
[2]王圣海.純電動城市客車駕駛行為與能耗關系統計分析[J].客車技術與研究,2020,(2):60-62.
[3]隋允康.建模變換優化—結構綜合方法新進展[M].大連:大連理工大學出版社,1996.
[4]羅潤,牛志剛.基于模式識別的純電動汽車驅動控制策略[J].機械設計與制造,2020,(11):37-41.
[5]宋強,萬海桐,米玉軒,葉山頂.純電動汽車加速過程中的驅動轉矩優化控制策略[J].江蘇大學學報(自然科學版),2017,38(01):1-6.
[6]喻碧怡,純電動汽車驅動轉矩控制策略研究[J].《湖南大學碩士論文》,2018.
[7]吳為理,插電式混合動力汽車動力耦合系統設計及應用研究[J].《華南理工大學碩士論文 》, 2012.
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32
