基于垂起固定翼技術人工智能巡檢策略研究
2021-06-24 01:21:54趙昊東王明馨李小蘭
東北電力技術 2021年4期
趙昊東,許 超,王明馨,李小蘭
(1.國網沈陽供電公司,遼寧 沈陽 110003;2.沈陽農業大學,遼寧 沈陽 110866)
我國電網的高壓輸電線路分布范圍廣,且有一部分線路架設在地形復雜、氣象環境惡劣的地區。這一情況使輸電線路及其相關器件的安全運行面臨嚴峻的考驗,對高壓輸電線路的巡檢、維護和管理提出了更高要求。使用無人機進行定期巡檢作為一種新型、安全、高效的巡檢作業形式已在高壓輸電線路作業中逐步應用,并呈現替代傳統作業方式的趨勢[1]。
目前,電力巡檢手段主要采用人工利用望遠鏡巡檢和近距離遙控無人機巡檢兩種方式。這兩種方式均以人為基本行動單位。受觀測手段及多旋翼無人機控制距離的限制,均需要工作人員靠近輸電塔,在巡線人員容易到達的區域有較好的巡檢效果。用于巡檢的遙控無人機主要分為3種類型:多旋翼無人機、無人直升機和固定翼無人機[2-4]。其中,多旋翼無人機以其可定點懸停采集數據的特點被廣泛使用,但是其飛行速度慢,在一定的續航時長下,覆蓋的輸電線路和輸電塔有限。另外,對一些分布在地形復雜和偏遠地區的輸電塔來說,工作人員靠近輸電塔的難度很大,且增加了巡檢的時間成本、人員成本以及資金成本。為此,迫切需要一種低成本、高可靠性的電力巡檢手段,實現對難以到達的輸電塔群的巡檢。
本文提出基于垂起式固定翼無人機[5-6](以下簡稱垂起無人機)的人工智能巡檢方法對偏遠地區的輸電塔群進行智能化巡檢。垂起無人機從車載平臺起飛,采用慣性與衛星定位組合導航的方法對方圓20 km內位置已知的多個輸電塔實現快速自動化巡檢。在巡檢過程中垂起無人機以固定翼狀態對輸電塔進行精確的繞圈飛行,使用搭載在垂起無人機上的側向捷聯式成像設備對輸電線路和輸電塔進行360°監視。此外,本文對該方案在回路仿真系統里進行了仿真驗證[7]。
1 垂起無人機智能化巡檢技術方案
垂起無人機偏遠輸電塔群巡檢系統包括垂起無人機飛行平臺、側視捷聯成像模塊以及無人機導航控制系統3個部分。
垂起無人機不但兼具多旋翼無人機可垂直起飛和降落、定點懸停、速度快、覆蓋范圍廣的特點,而且續航時間和負重能力都較強。選擇垂起無人機的固定翼模式來進行繞圈飛行,利用側向的低成本捷聯式工業相機完成對輸電塔的長時間有效繞圈巡檢。與旋翼模式相比,垂起無人機減少了機載電源電量損耗,這也是選擇垂起無人機作為飛行平臺的根本原因。
1.1 垂起無人機智能化巡檢工作流程
執行巡檢任務時,操作人員將巡檢任務涉及到的所有輸電塔的位置坐標作為自動飛行航點寫入到飛行任務中,垂起無人機從停放的地面檢修車上垂直起飛,如圖1所示。垂起無人機在起飛過程中從多旋翼狀態切換至固定翼狀態后開始進行航點飛行。垂起無人機在飛向下一個輸電塔的過程中,會實時判斷自身與輸電塔之間的距離,當到達設定的安全距離后,無人機會根據相對距離矢量與當前速度矢量的關系做出判斷,避免與輸電塔進行交匯,然后從輸電塔的一側進入繞圈航線,根據輸電塔的位置信息以及預設的繞圈半徑和高度控制無人機圍繞輸電塔,并進行繞圈監測。
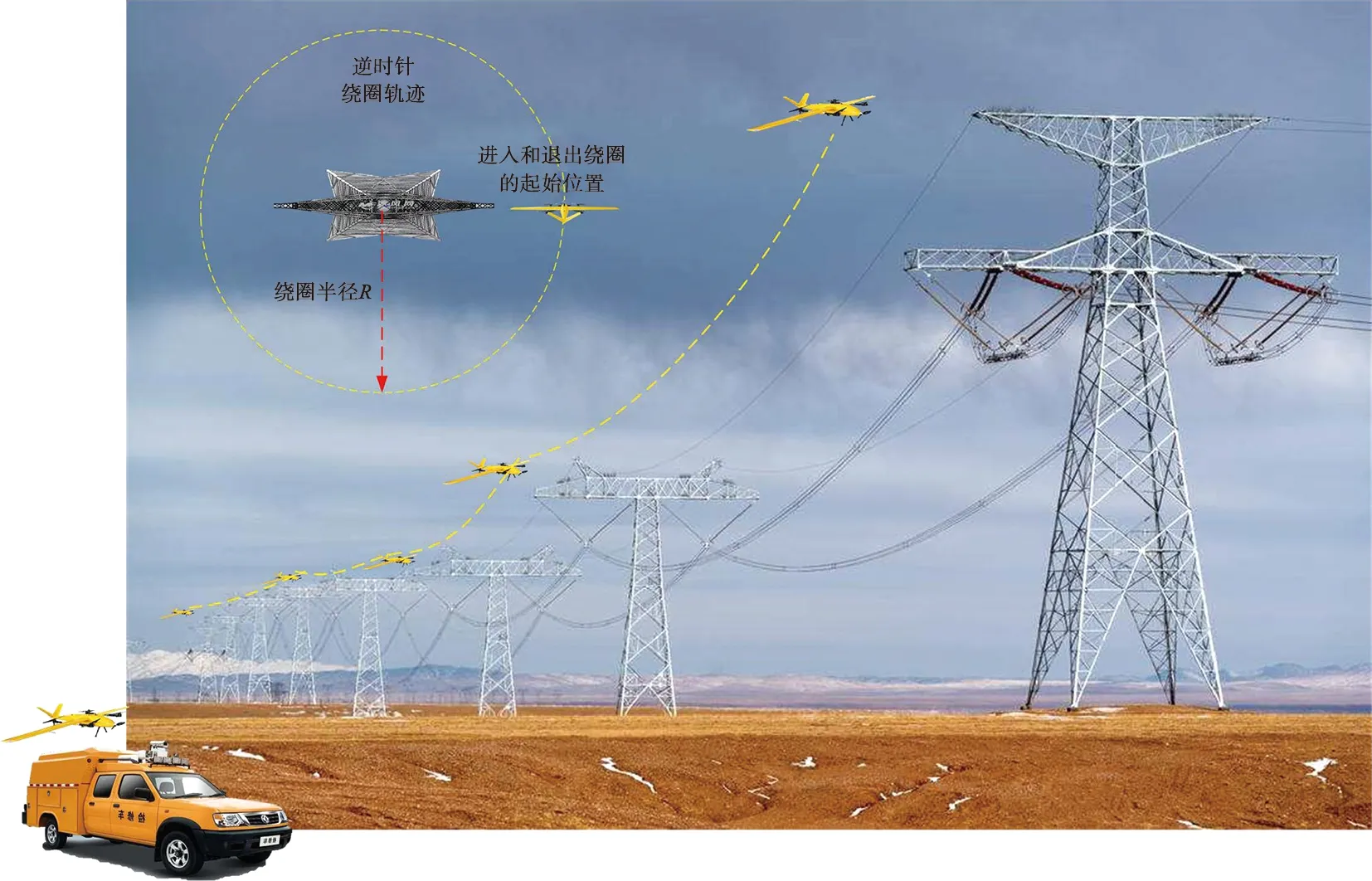
圖1 基于垂起無人機的輸電塔群智能化巡檢過程
垂起無人機巡檢的詳細工作流程如圖2所示。在第2個判斷環節,如果預設的高度和繞圈半徑不合適,可以通過在安全范圍內調整高度和繞圈半徑,起到對側視捷聯相機拍攝角度和距離的調整。
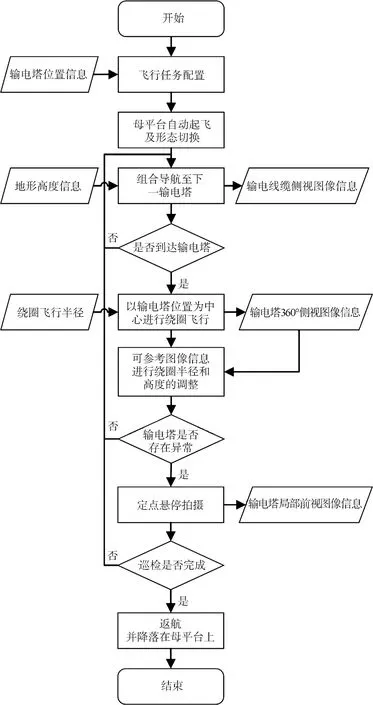
圖2 垂起無人機智能化巡檢工作流程
1.2 側視捷聯成像模塊
側視捷聯成像模塊為可見光制式,固定安裝在垂起無人機的側面,光軸位于垂起無人機機體坐標系Obxbybzb的Obxbyb平面內,垂直于Obxb軸,相機參數如表1所示。該成像模塊在巡檢過程中負責實時拍攝輸電線纜的測試圖像信息和輸電塔的360°圖像信息。本文中選用英偉達的Jetson TX2作為圖像處理模塊。受限于圖像壓縮算法的運行性能,方案中圖像的幀率為25~30幀/s。

表1 海康機器人工業相機參數
垂起無人機導航控制采用的是慣性測量單元與衛星導航組合導航控制,而且沒有地形高度信息,無人機飛行過程中使用的高度是根據氣壓高度和衛星定位高度融合的高度,精度為3~5 m,所以在圍繞輸電塔進行定高盤旋飛行時,高度難免有較大偏差。在側向捷聯相機獲取到輸電塔的圖像中,可以根據輸電塔主體在圖像坐標系的像素位置計算出視線高低角λv。然后,根據視線高低角計算出需要的高度補償,對定高高度進行修正,從而保證輸電塔主體一直處于側向畫面的中間,實現較好的巡檢效果。此外,也可根據輸電塔主體在側向圖像中的視線方位角λh對繞圈中心進行微調。視線高低角和視線方位角的計算連同圖像采集、壓縮等功能均在英偉達的Jetson TX2圖像處理模塊中實現。
1.3 垂起無人機繞圈控制方法
一般情況下,根據圖3中左側示意圖可知,在指定L和R后,可根據無人機的實時速度(無人機的一般巡航速度)計算出一個側向的期望加速度來控制無人機圍繞O點進行繞圈飛行。
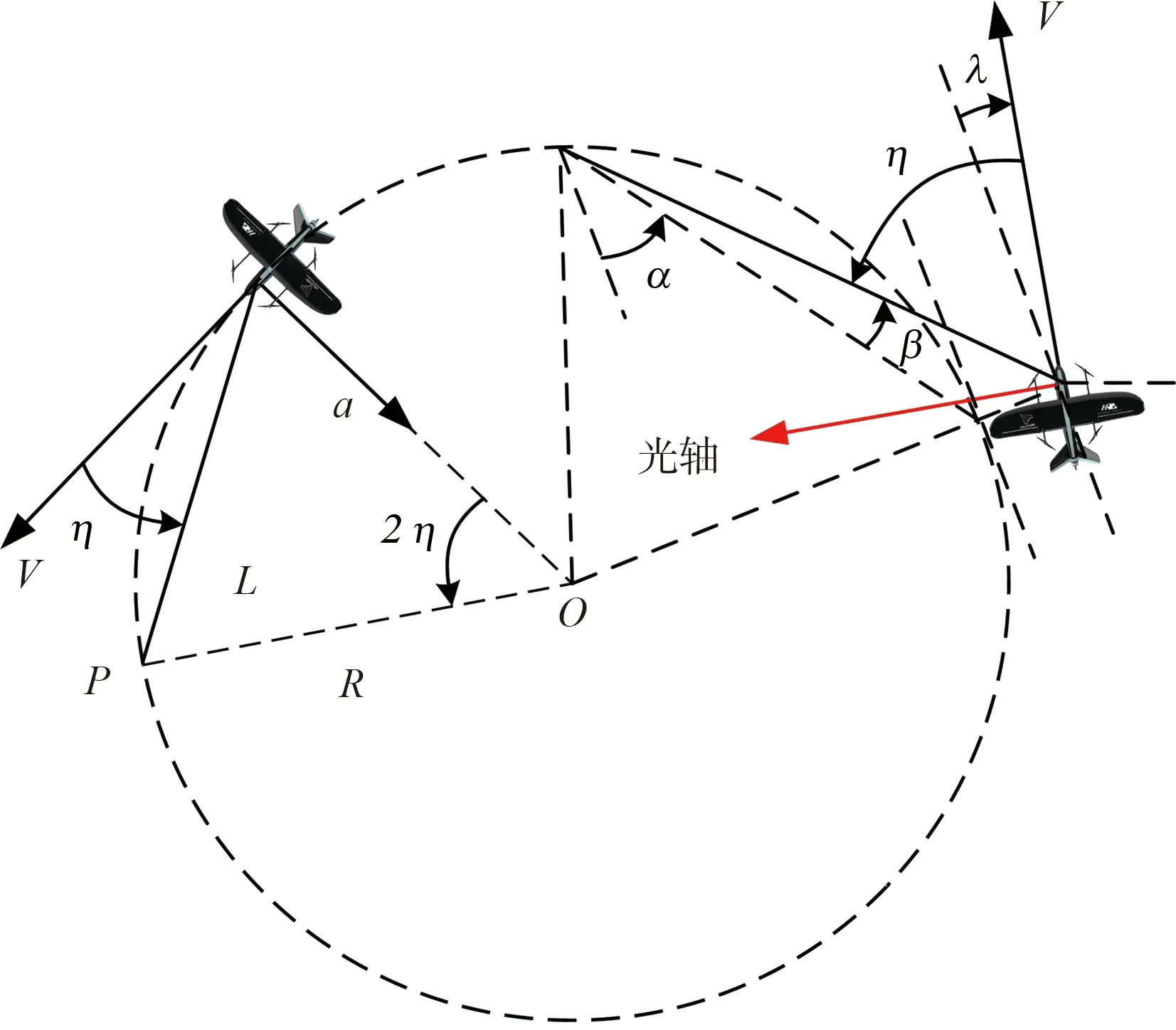
圖3 垂起無人機繞點定高盤旋圖
L=2Rsinη
(1)
(2)
(3)
圖3中,如果無人機繞圈定高中心存在誤差,即輸電塔主體在側向圖像中的視線方位角λ不為零。可令η=η0+λh對繞圈中心進行微調。一般情況下,因為定高中心是實測輸電塔中心的經緯度,誤差幾乎為零,所以不建議長時間使用視線方位角對其進行修正。對定高高度的補償可通過測量的實現高低角λv計算出補償高度Δh=R·arctanλv。
本方案中垂起無人機的導航控制系統選擇Pixhawk開源自駕儀,并對其進行二次開發,垂起無人機的繞圈控制方法位于其固定翼控制狀態中的側向飛行控制應用層。
2 硬件在回路中的仿真過程
2.1 垂起無人機繞圈控制方法
硬件在回路仿真平臺軟件框架及實物圖如圖4所示。仿真系統使用X plane-10飛行模擬軟件,該軟件支持添加自定義地景、地面目標模型與飛行器模型。X plane-10可模擬飛行器光學采集設備進行圖像采集,支持調整圖像分辨率。采用Q Ground Control(QGC)開源地面站對飛行器數據進行監控,并且支持Pixhawk與X plane-10的硬件在回路中的仿真功能。圖4中Pixhawk2自駕儀與TX2底層使用UART串口通信,傳輸協議為Fast RTPS協議。自駕儀中搭載Nuttx操作系統,使用uORB進行各應用間的消息傳遞管理。圖像采集卡獲取可視化飛行模擬電腦中飛行模擬軟件的界面信息(仿真無人機的側向圖像信息)后傳遞給Jetson TX2進行處理。Jetson TX2作為仿真平臺中的核心模塊之一,安裝Ubuntu操作系統,運行圖像采集、目標跟蹤、圖像壓縮與傳輸、數據處理、線程控制等程序,并在目標跟蹤軟件里對輸電塔的視線高低角和視線方位角進行計算。
本文選取機場的塔臺作為模擬繞圈目標,如圖5所示,并對其進行繞圈飛行仿真,繞圈航跡為黃色虛線圈所示,黃色實線圈中為無人機。
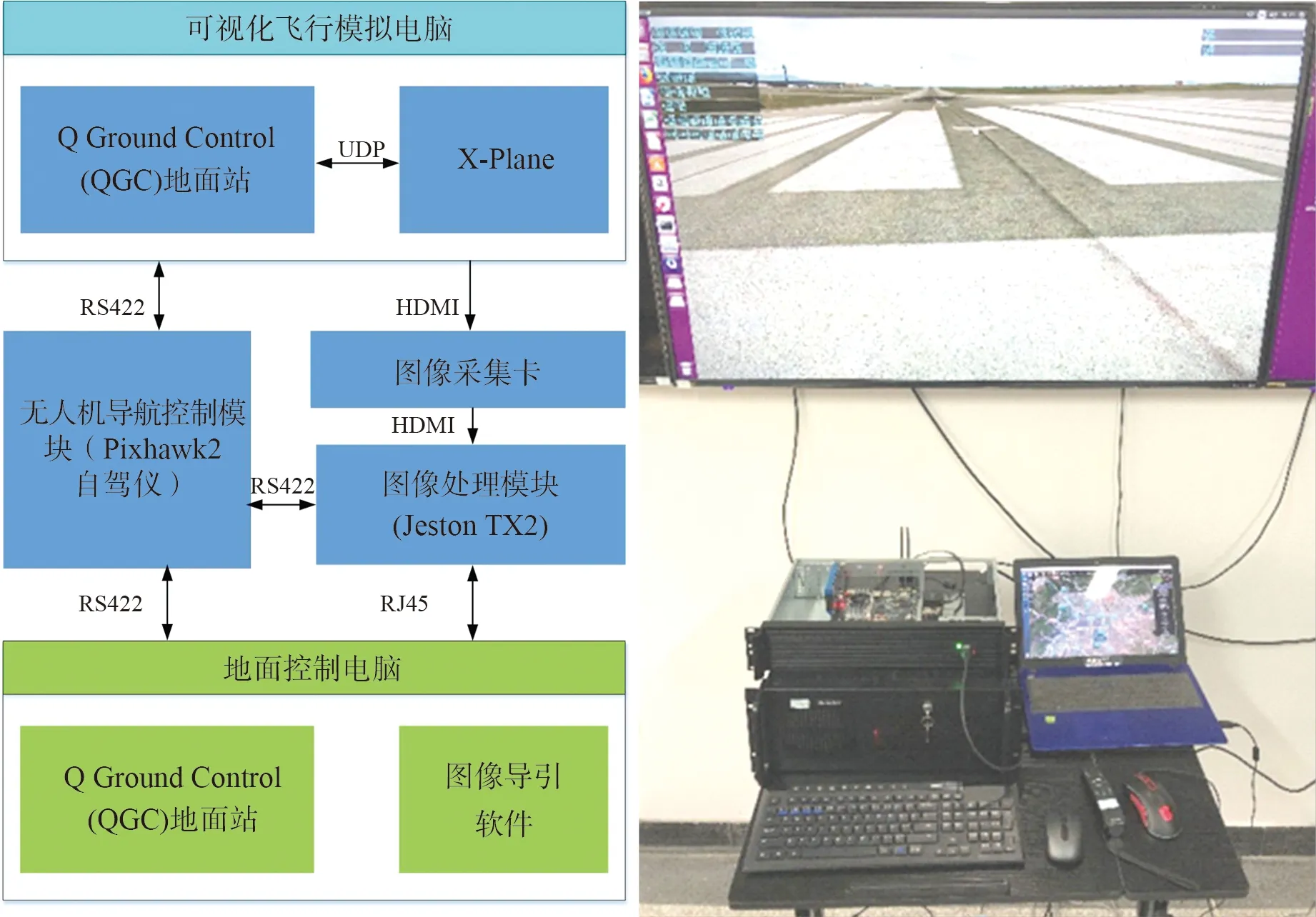
(a)(b)圖4 硬件在回路仿真系統中的流程及實物圖
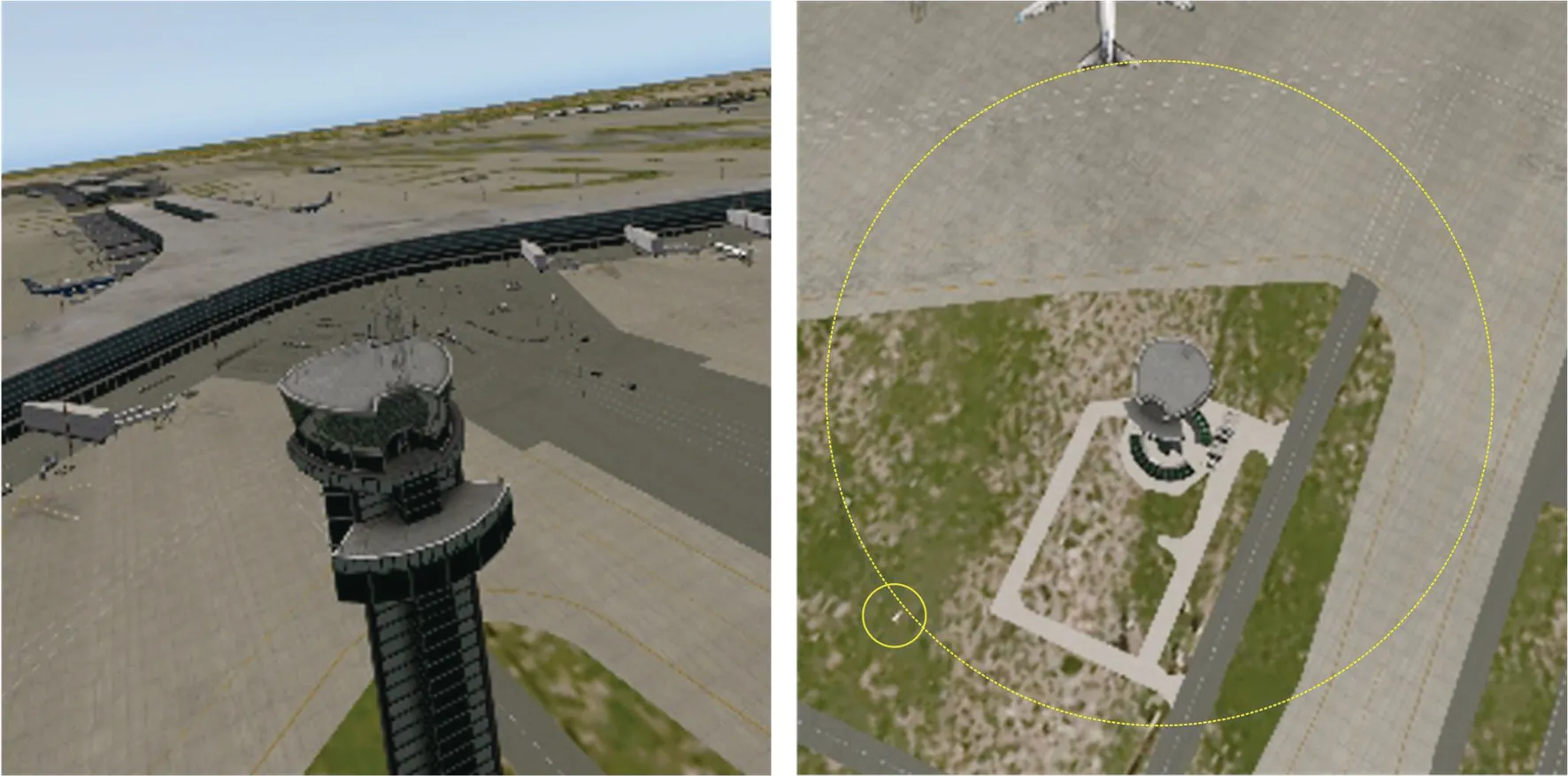
(a)(b)圖5 機場控制塔臺-硬件在回路仿真模擬繞圈目標
2.2 仿真結果分析
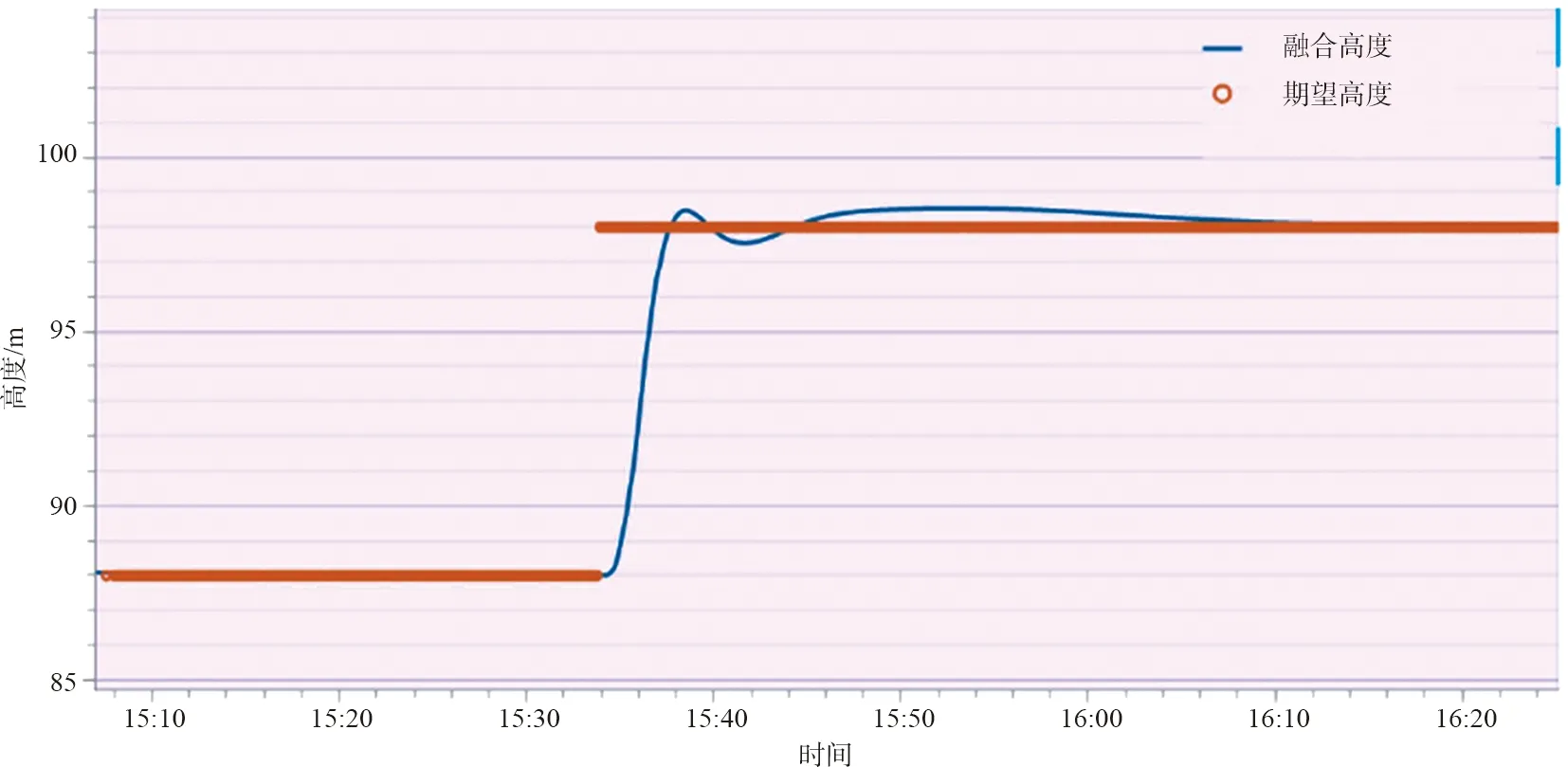
在硬件回路仿真中,仿真無人機圍繞塔臺以相對高度60 m,半徑50 m進行繞圈飛行,無人機的巡航空速約為16 m/s。期間,通過采用塔臺某一位置在無人機側向圖像中的高低視線角信息對無人機的繞圈高度進行補償,使塔臺位置可以處于無人機側向圖像的中間區域,仿真數據如圖6所示。圖6(a)為無人機高度曲線;圖6(b) 無人機滾轉姿態曲線; 圖6(c)無人機俯仰姿態曲線。
(a)

(b)
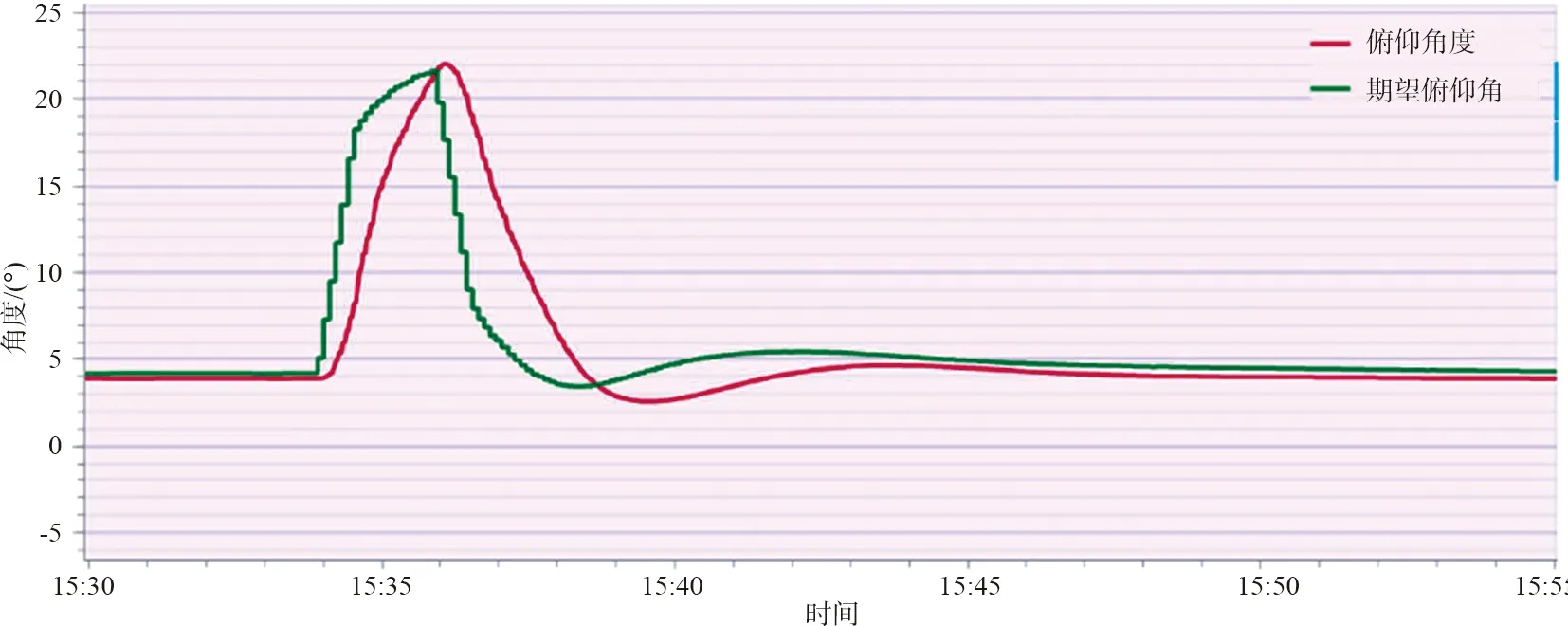
(c)圖6 仿真數據
從圖6可知,仿真無人機可以在設定的60 m相對高度穩定地以27°滾轉角和4°的俯仰角繞塔臺進行半徑為50 m的繞圈飛行。圖6(a)中的高度為海拔高度,仿真位置的海拔高度為28 m,所以以60 m相對高度飛行時,顯示出來的融合高度約為88 m。從圖6(b)和圖6(c)可以看出,無人機飛行姿態穩定,且姿態控制效果良好。
此外,圖6還包含了使用視線高低角進行飛行高度補償的測試,從圖6(a)可以看出期望的高度從88 m變為98 m,同時圖6(b)和圖6(c)中的滾轉和俯仰姿態均作了調整。圖6(c)中無人機在爬升過程中為了保持繞圈半徑滾轉姿態做了5°以內的調整。
3 結束語
本文基于垂起無人機提出對偏遠地區的輸電塔群進行智能化巡檢的方法。垂起無人機的多旋翼模式可用于起降以及懸停后對某一點的檢測。垂起無人機以固定翼狀態圍繞輸電塔進行繞圈飛行時,可通過搭載側向捷聯成像設備獲取穩定的側向圖像信息來實現對輸電塔的檢測。此外,垂起無人機的固定翼模式可以以更小的耗能來實現大范圍的覆蓋,完成對多個輸電塔的快速巡檢。本文在仿真系統中已經將相關算法在性能可靠的硬件平臺上應用,完全具備搭載在無人機上飛行并完成巡檢的能力。