
水下機器人靜水壓力試驗研究
2021-06-24 08:19:12吳福森
機電工程技術 2021年5期
關鍵詞:實驗
吳福森
(國家特種機器人產品質量監督檢驗中心,福建泉州 362021)
0 引言
隨著人們對海洋領域的日益關注以及海洋技術的發展,水下機器人將在海洋水下探測、作業、援救中發揮越來越大的作用。而水下機器人測試技術作為水下機器人性能的保障,也必然成為水下機器人設計、試驗、改造中至關重要的一個環節[1]。完善的測試體系、科學的測試方法、良好的測試條件是保證水下機器人出廠、正常進行水下工作的前提[2]。
輕型有纜水下機器人是帶有線纜的用于海洋水下環境觀察與作業,水下部分起吊(空氣)質量不大于1 t的水下機器人;或用于江河湖泊的,額定工作水深不小于100 m的觀測型水下機器人;或用于江湖湖泊的,額定工作水深不小于300 m的作業型水下機器人[3]。
靜水壓力是指水下機器人的空艙、浮力材料,應能載標稱的壓力條件下不產生殘余變形,試驗結束后應能正常工作[4]。靜水壓力試驗是指將水下機器人的空艙、浮力材料靜水壓力,按照GB/T 32065.15規定的方法進行試驗;充油電路按照GB/T32065.15進行帶電試驗,電路工作應正常[5]。
目前在對于輕型有纜水下機器人的靜水壓力試驗還沒有成熟的設備,直接在江河湖海里試驗,對被測機器人和試驗人員都有很大的危險性[6]。國內外有研究機構采用壓力實驗艙進行測試,但由于升降壓控制系統不夠靈敏,導致試驗準確度不能滿足要求[7]。由于實驗艙體的密封性要求很高,帶纜的機器人不能實現線纜的穿艙試驗,不能滿足標準要求的機器人帶電試驗[8]。
本文研究水下機器人的靜水壓力試驗方法和測試標準,設計一套應用于水下機器人靜水壓力測試試驗平臺,能夠滿足靜水壓力的測試要求;同時對水下機器人的放置結構進行改進,方便機器人的投入和取出。
1 硬件系統設計
本文的試驗設備采用的是一種用于輕型有纜水下機器人靜水壓力試驗的裝置,該裝置由水下機器人深水模擬實驗艙、艙內照明和攝像采集系統、自動加卸壓系統、機器人裝卸裝置四大部分組成。
1.1 水下機器人深水模擬實驗艙
如圖1所示,水下機器人深水模擬實驗艙采用Q345材料制作,艙內壁涂鍍層為高密度抗腐蝕漆,最高模擬水壓可以達到6.5 MPa,相當于水深650 m,實驗艙內部深度4 m,直徑1.5 m,最大可以容納3.5 m×1.2 m×1.2 m(長×寬×高)的測試樣品,采用液壓傳動開關艙蓋,并加裝一圈密封緊固圈,在實驗過程中保證艙內壓力穩定,保障加減壓過程安全。
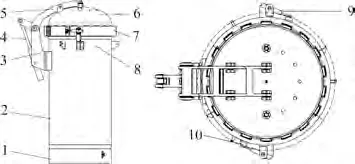
圖1 水下機器人深水模擬試驗艙
如圖2所示,實驗設備采用水密電纜雙母頭穿艙連接技術,實現輕型有纜水下機器人帶電實驗,相比其他實驗的測試方式,可穿艙帶電測試,可遠側監測機器人測試情況,升降壓控制系統更穩定,實驗環境更安全。

圖2 水密線穿艙
1.2 艙內照明和攝像采集系統
水下攝像和照明系統是集成了水下攝像機、水下照明燈、分線盒、顯示器、硬盤錄像機、LED恒流源、開關電源、觸控鼠標以及其他附件的一體化監控系統,控制系統包含視頻采集顯示和水下照明控制兩部分,主要任務通過遠程調光,提高水下攝像機的成像質量,完成水下攝像機視頻采集顯示。艙內照明和攝像系統如圖3所示。

圖3 艙內照明和攝像系統
水下攝像機通過視頻線(4路網線、4路同軸)連接至視頻輸入接口,將視頻信號接入系統。最多可同時從4個方向觀察試驗樣本,能夠全方位實時監控實驗樣本的狀態變化。
1.3 自動加卸壓系統
試驗艙加卸壓控制系統的組成如圖4所示,包括1部高壓泵、試驗艙、2部電動截止閥,并且實時顯示其運行狀態。設備主要參數如表1所示。

圖4 自動加卸壓系統
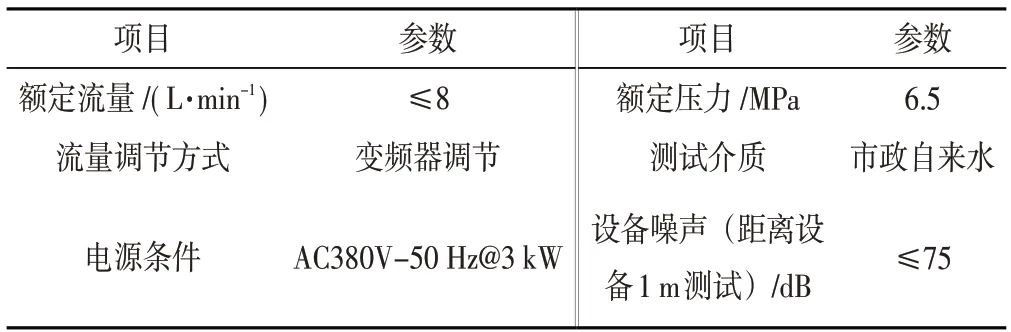
表1 設備主要參數
如圖5所示,試驗參數設置界面的靜壓試驗參數為一組壓力臺階,每個臺階包括壓力、升降壓速度、終壓保持時間3個參數,根據試驗需要可設置循環次數,也可以選中配置文件列表中的任意文件,通過配置文件載入方式進行快速配置試驗參數
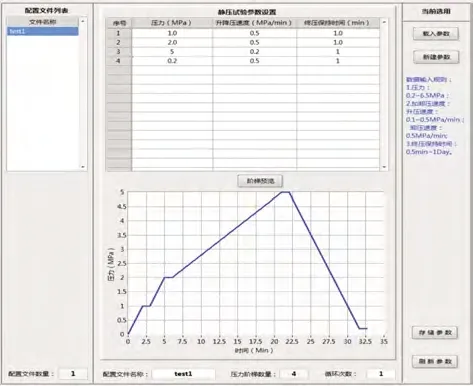
圖5 試驗參數設置界面
1.4 機器人裝卸裝置
機器人裝卸裝置由懸臂起重機和吊具組成,如圖6所示,懸臂起重機載重最大值為3 t,旋轉范圍180°,懸臂起重機由立柱、回轉臂回轉驅動裝置以及電動葫蘆組成,安裝在支撐性混凝土立柱上,電動葫蘆在懸臂工字鋼上做左右直線運行,起吊內筒。將內筒吊到地上,然后裝上機器人,再起吊放入試驗艙內。內筒結構為上下2片直徑為1.5 m的圓形鋼板,中間由3條工字鋼連接,底部鋼板上開有數個圓孔,在內筒下試驗艙時可以有效提高內筒下降穩定性,平衡浮力不均勻帶來的內筒下降角度傾斜問題,避免下降過程中內筒傾斜導致機器人偏移出監控范圍。

圖6 機器人裝卸裝置
2 樣品檢測實驗
2.1 實驗樣品
樣品概況如表2所示。

表2 樣品概況
2.2 實驗條件
標準按照GB/T 36896.1-2018輕型有纜遙控水下機器人第1部分:總則。實施。現場檢測條件如表3所示。
2.3 實驗過程
將水下機器人安置在機器人裝卸裝置的內桶中,并檢驗水下機器人外觀,然后利用懸臂吊起重機起吊內桶放入實驗艙內,封閉實驗艙,加壓,保壓,卸壓,取出水下機器人,觀察水下機器人狀態。實驗各個階段的如圖7~9所示。

表3 實驗條件檢測

圖7 測試前水下機器人外觀

圖8 測試中水下機器人外觀
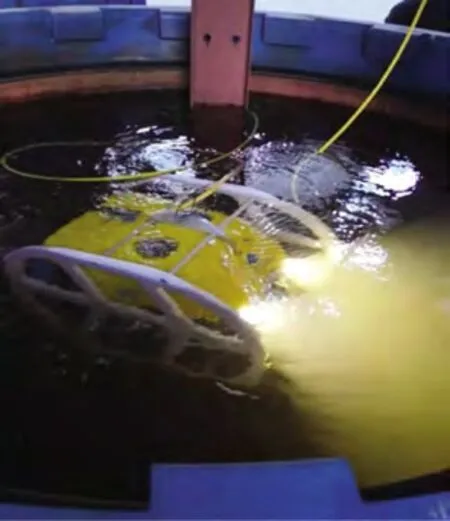
圖9 測試后水下機器人外觀
2.4 實驗參數
實驗過程壓力值記錄值如表4所示。
2.5 實驗結論
在實驗壓力3 MPa下,機器人各項功能正常。水下機器人的空艙,浮力材料,在標稱的壓力條件下不產生殘余形變,試驗結束后能正常工作。
本文研究水下機器人的水下性能檢測方法和測試標準,設計一套應用于水下機器人靜水壓力實驗平臺,并對艙蓋穿艙改進和內筒改進。建立可考察特種機器人水下通用性能的水下復雜環境模擬平臺,平臺可實現水下650 m級深度及真實水溫環境模擬,可真實模擬特種機器人水中下潛及上浮速度。平臺檢測功能包括機器人水下作業性能測試、水下通信可靠性測試、機器人水下密封性能測試等。同時建立特種機器人水下性能檢測方法。

表4 壓力值記錄
3 結束語
物聯網和人工智能的快速發展,為水下作業機器人應用帶來了巨大的需求和應用,特別是近海海域水資源監測以及江河湖泊深水水資源監測,本文研究水下機器人的靜水壓力試驗方法和測試標準,并設計一套靜水壓力測試試驗平臺,平臺檢測功能包括機器人水下作業性能測試、水下通信可靠性測試、機器人水下密封性能測試等。同時建立特種機器人水下性能檢測方法。對機器人水下性能的測試表明該平臺能夠滿足靜水壓力的測試要求,能夠為水下機器人的放置結構的改進提供可靠數據。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
