基于自適應遺傳算法的電力倉庫堆垛電機優(yōu)化控制
2021-06-25 03:46:28賈廣田陳志煬
水電站機電技術 2021年6期
賈廣田,陳志煬,周 靖
(國網新源控股有限公司新安江水力發(fā)電廠,浙江 杭州 311600)
1 引言
隨著電力企業(yè)生產規(guī)模的不斷擴大,電力物資的多樣性是對傳統人工管理倉庫的一個挑戰(zhàn)[1]。越來越多的企業(yè)在倉庫的現代化管理中采用了自動化倉庫,簡稱AS/RS[3,4]。自動化倉儲系統貨物的存取是通過堆垛機完成的,因而其控制單元是整個控制系統的核心,為了實現高度自動化,滿足操作的靈活性和實用性,達到人機交互的要求,堆垛機控制需要具備聯機自動、單機自動以及手動3項功能。
(1)聯機自動:常規(guī)狀態(tài)下的工作方式。系統初始化后,堆垛機向監(jiān)控系統索要貨單;監(jiān)控系統發(fā)送貨單;接到貨單的堆垛機在貨單區(qū)域存入貨單。
(2)單機自動:用于接收手動操作臺,如入庫、出庫、伸、縮、升、降等動作命令。
(3)手動:與自動不同,手動僅能通過地面控制臺觸摸屏進行伸、縮、升、降、急停等操作,主要用于系統調試。當執(zhí)行單條貨單時,堆垛機自動到位,由人工通過地面控制臺在觸摸屏上操作貨叉并取放貨物。
堆垛機速度控制方式采用變頻器對交流電動機進行調速控制,不僅可以實現異步電機的無極調速,還具有一定自我保護功能。變頻器的調速范圍廣、輸出平滑性好、機械特性硬,一方面,當電機帶動較大負載啟動時,可以實現電動機的軟啟動,減小沖擊電流;另一方面,變頻器能在電動機運行過程進行實時檢測,比如電網電流瞬時下降、電網缺相、直流過電壓、功率模塊過熱、電機短路等,并且立即采取措施,不僅保護了變頻器,還保護了電機[5-7]。
變頻器的變頻原理可用式(1)表示:

式中:f為電源頻率,p為電動機定子繞組的極對數,s為轉差率。
由式(1)可得知,電源頻率f與電機轉速n成正比關系,所以當p與s為定值時,想要控制堆垛機在運行時的速度,可以通過改變電動機的頻率f間接改變轉子轉速n,從而改變堆垛機的運行速度。
本文研究旨在堆垛機運行路徑優(yōu)化,基于某電力企業(yè)立體倉庫,建立電機運行的優(yōu)化模型,并引入改進的自適應遺傳算法對優(yōu)化模型進行求解,從而能有效提高運行效率。
2 自動化倉庫堆垛機的路徑優(yōu)化
2.1 路徑優(yōu)化原理
智能小車把入庫的貨箱放到指定的入庫臺貨架上,堆垛機從貨架臺取到貨箱并送至倉庫的貨位上,堆垛機需要把貨位上的貨物送到出庫臺上,之后通過貨物自動分揀系統分揀,再從分揀口將分揀后貨箱通過汽車等運輸工具運送到不同的分廠或車間,這就是AS/RS貨架區(qū)工作的全過程,是一個典型的組合優(yōu)化問題。
為了提高堆垛機從貨架區(qū)中取貨和存貨的工作效率,需要選擇一個最優(yōu)化的路徑。解決最優(yōu)路徑這一問題就等于解決了AS/RS工作效率問題,而這一問題的關鍵在于如何從多組路徑中找到一組路徑,這組路徑是全部路徑中的最優(yōu)路徑,它又稱為組合優(yōu)化。組合優(yōu)化就是需要在數學結構中找到一個解,在滿足約束條件下還能使目標函數達到最優(yōu)。
2.2 堆垛機的作業(yè)方式
堆垛機的作業(yè)方式可分為單一作業(yè)方式和復合作業(yè)方式。
圖1(左圖)表示單一作業(yè)方式。當堆垛機接到一批出入庫作業(yè)指令時,在此作業(yè)方式下,堆垛機每次都會先從原點出發(fā)執(zhí)行入庫作業(yè)指令,然后堆垛機回到原點;接著堆垛機再從原點出發(fā)來執(zhí)行下一條入庫作業(yè)指令,循環(huán)往復。由左圖可知,每完成一項任務,則單一作業(yè)方式用時為tf=2tOP+2tOQ。式中,堆垛機在完成取送貨物時,從O點運行到P點的揀選作業(yè)消耗時間為tOP,從O點運行到Q點的揀選作業(yè)消耗時間為tOQ。
圖1(右圖)表示復合作業(yè)方式。首先從原點出發(fā)執(zhí)行入庫作業(yè),與單一作業(yè)方式不同的是,執(zhí)行完入庫作業(yè)后堆垛機直接執(zhí)行新接受的出庫作業(yè)指令,然后再運行到原點。復合作業(yè)的作業(yè)周期tf=tOP+tPQ+tOQ,式中tPQ表示堆垛機從P點運行到Q點的作業(yè)時間。
比較兩種作業(yè)方式,顯然復合作業(yè)方式比單一作業(yè)方式所用的時間短。然而此復合作業(yè)方式是以隨機的順序執(zhí)行出入庫作業(yè),在高峰期這種方式的效率仍會給生產和客戶需求帶來不便,因而必須優(yōu)化堆垛機運行總路徑[8]。

圖1 揀選作業(yè)方式圖
3 建立揀選作業(yè)路徑優(yōu)化模型
一般堆垛機采用復合作業(yè)工作模式,在這模式下,對于揀選出入庫作業(yè)都是成對執(zhí)行任務。根據tf=tOP+tPQ+tOQ可知,當一批出入庫作業(yè)的貨位確定時和也確定,而則隨入庫貨位和出庫貨位執(zhí)行順序的改變而改變,因而只需考慮出入庫貨位配對方案對的影響。
結合實際情況,作出如下假設:
(1)一批作業(yè)中有m條入庫作業(yè)和n條出庫作業(yè)。
(2)堆垛機操作速度為恒速運行,最優(yōu)路徑規(guī)劃時忽略存取時間。
(3)堆垛機水平和垂直運動時間相同,因而可以忽略啟停時間。
(4)兩點的用時取垂直或水平方向中最大值。
設P={P1,P2,L,Pm},Q={Q1,Q2,L,Qm}為2個有序序列,其元素分別是依次執(zhí)行的入庫貨位和出庫貨位,則堆垛機在揀選作業(yè)時通過復合作業(yè)工作模式路徑為:

剩下n-m條單一揀選作業(yè)模式下出庫作業(yè)。
綜上,堆垛機復合作業(yè)路徑優(yōu)化目標為:讓入庫貨位序列P不變,重新排序Q中的元素,并取出庫貨位序列Q中前m個元素與P中的元素依次配對順序執(zhí)行,從而使最小。
設第i個入庫貨位Pi的坐標為(xi,yi),令Q(i)表示重新排序后的第i個元素,其坐標為(xj,yj)。由此,建立復合作業(yè)方式路徑優(yōu)化模型為:
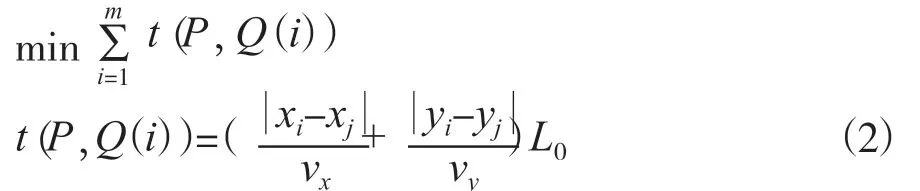
式(2)的約束條件為:
式中,vx為水平方向上堆垛機揀選作業(yè)時平均速度,vy為垂直方向上堆垛機揀選作業(yè)時平均速度,L0為貨格的寬度。
改善GA(遺傳算法)適應度函數為:

其中,Cmax可以取當前最大適值或者設定一個固定值;g(x)是問題的目標函數值;f(x)是個體的適應度。
目標函數g(x)為:

適應度函數f(x)為:

4 遺傳算法的改善設計
4.1 基本的參數設定
本文研究對象設定為固定式貨架,堆垛機在揀選作業(yè)過程中,在水平方向和垂直方向都是勻速運行,且只考慮堆垛機的揀選行走時間。設堆垛機在單排貨架巷道內完成揀選作業(yè),將點(0,0)作為巷道口,路徑參數如表1所示。
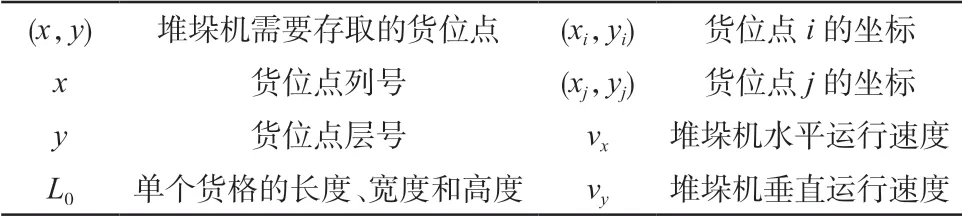
表1 路徑參數
4.2 自適應遺傳算法原理
(1)GA
根據GA的遺傳原理,在選擇父代后,需要通過交叉概率Pc和Pm變異概率來產生下一代。因此,參數Pc和Pm直接影響算法的收斂性,因而成為影響GA優(yōu)勝劣汰的關鍵。對于交叉概率Pc,當Pc的值越大時,相應的種群中父代被淘汰的可能性越大,子代產生的速度就越快;反之,當Pc的值較小時,又會延緩新個體的產生,甚至停滯不前。對于變異概率Pm,若Pm過小,不易形成子代;若Pm過大,則GA就成為了交叉概率中一定的隨機搜索算法。在一般的GA中,Pc和Pm是固定的,針對不同的優(yōu)化問題必須通過反復試驗調整Pc和Pm以獲得最優(yōu)解,即使如此也難以保證獲得最佳的參數值,因而運用GA處理路徑優(yōu)化問題時,其收斂速度較慢,算法不穩(wěn)定性,甚至過早收斂于一個非全局最優(yōu)解。
(2)AGA(自適應遺傳算法)
近年來相關的研究人員作了大量的研究,其中被廣泛接受的是Srinivas等提出的自適應遺傳算法。AGA的核心思想是引入自適應調整函數,使遺傳控制參數Pc和Pm隨個體適應度大小和種群的分散程度自動調整[9]。當個體Pc和Pm取值不大時,即已經接近群體最佳適應度的時候,產生了性能較好的個體,可以盡量地保留住其優(yōu)良模式,反之將對其采用較大的Pc和Pm,以加快個體的更新速度;當種群過早收斂,要陷入局部最優(yōu)時,Pc和Pm需提高,反之當種群在解空間發(fā)散時,Pc和Pm需降低。通過這種自適應調整的Pc和Pm,在保持種群多樣性的同時也保證了算法收斂性,提高了算法的優(yōu)勝劣汰的能力。交叉概率Pc和變異概率Pm可用式(6)和式(7)表示:
式中,fmax為種群中最大適應度值,favg為每代種群平均適應度值,f'為較大父體的適應度值,f為兩個父體的適應度值,k1,k2,k3,k4為自適應控制參數,一般取(0,1)區(qū)間的常數。
由式(6)和式(7)可以看出,對于適應度大于群體平均適應度的個體,其Pc和Pm的變化范圍分別是(0,k1)和(0,k3);對于適應度低于群體平均適應度的個體,其Pc和Pm分別是k2和k4;而對于每代種群中適應度最大的個體,其Pc和Pm均為零,從而確保當前代最優(yōu)個體遺傳至下一代。
AGA這種調整方式的優(yōu)點體現在進化的后期。在進化的后期,最優(yōu)個體已接近全局最優(yōu)解,此時若再對其進行交叉、變異、產生的新個體適應度也不一定高。當然,這種調整在進化的初期會減緩新的優(yōu)良個體的產生。為此,調整種群中最大適應度的個體Pc和Pm使其不等于零,這就等同于提高了最優(yōu)個體的Pc和Pm,從而避免處于一種近似停滯的狀態(tài)。對于每一代的優(yōu)秀個體,可采用最優(yōu)保存策略直接復制到下一代。
(3)參數的自適應調整
如前所述,GA的收斂特性的關鍵是Pc和Pm的選擇,構造自適應調整函數的方法大同小異。本文采用AGA,Pc和Pm的自適應調整策略如式(8)和式(9)所示。此外,為了保留每一代的優(yōu)良個體,可采用最優(yōu)保存策略直接復制到下一代。
式中,fmax為種群中最大個體適應度值,favg為每代種群平均適應度值,f'為較大父體的適應度值,f為兩個父體的適應度值,pc1=0.9,pc2=0.6,pm1=0.1,pm2=0.001。
5 仿真實驗與結果分析
以AS/RS為例進行仿真實驗,設置固定貨架及堆垛機的參數:貨架的長高都為1 m、堆垛機勻速運行、不計取貨和放貨時間;設定GA參數:種群規(guī)模pop=100,交叉概率pc=0.9,變異概率pm=0.05,最大允許進化代數為200代。隨機生成揀選貨位點,仿真實驗結果和分析如下:
改善后的AGA與常規(guī)GA尋優(yōu)作對比,對比如圖2、圖3所示。
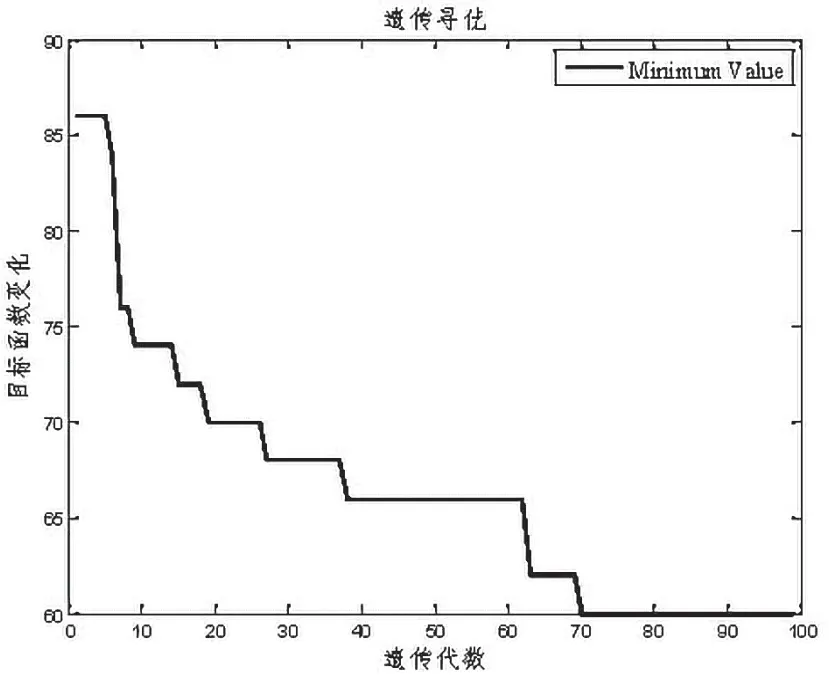
圖2 遺傳算法進化曲線

圖3 自適應遺傳算法進化曲線
AGA在求解揀選18個貨位點的進化過程中,大約在迭代38次時已收斂,因而在解決揀選路徑問題時,AGA比常規(guī)GA有更快的收斂速度,可以改善AS/RS的運行效率。
從表2中可以看出,經優(yōu)化后的自適應遺傳算法計算的運行路程平均降低20%左右,驗證了自適應遺傳算法的優(yōu)越性。

表2 揀選作業(yè)運行路程

圖4 遺傳算法揀選路徑
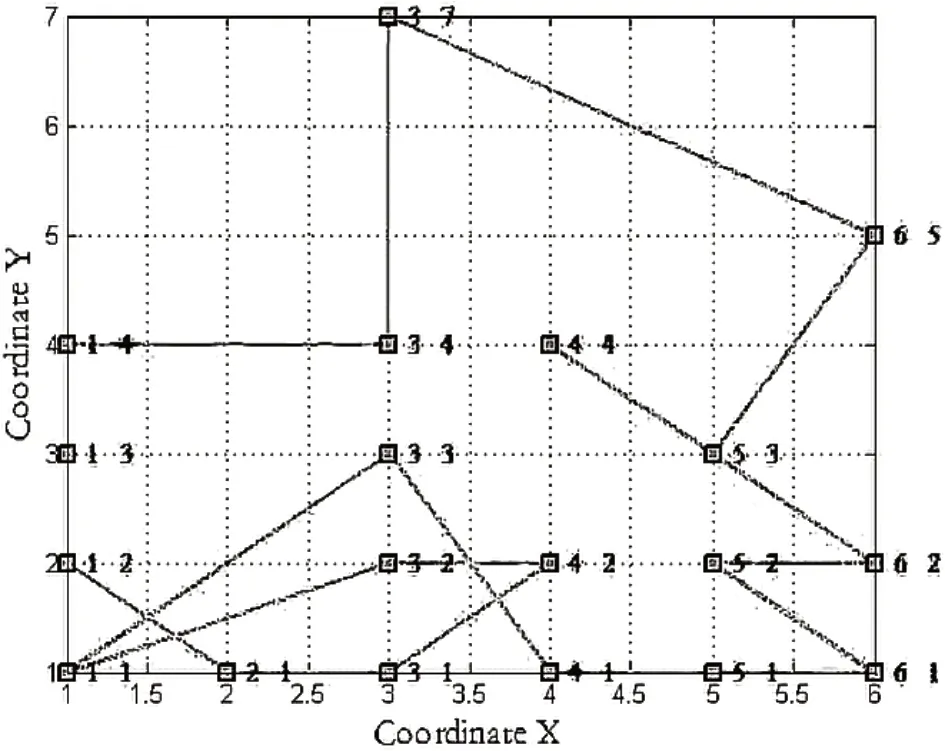
圖5 改善后自適應遺傳算法揀選路徑
隨機生成18個揀貨點,采用GA和改善后的AGA分別對揀選貨位點進行仿真實驗,表2給出了其中5次這兩種算法下的路徑距離。圖4表示GA實際運行的路徑軌跡(0,0)→(1,2)→(2,1)→(3,1)→(4,2)→(5,1)→(6,1)→(5,3)→(6,2)→(5,2)→(4,1)→(3,2)→(3,3)→(4,4)→(6,5)→(3,7)→(1,4)→(1,3)→(3,4)→(0,0)。圖5給出了改善后AGA算法的堆垛機運行的最短路徑:(0,0)→(1,2)→(2,1)→(3,1)→(4,2)→(3,2)→(3,3)→(4,1)→(5,1)→(6,1)→(5,2)→(6,2)→(5,3)→(4,4)→(5,3)→(6,5)→(3,7)→(3,4)→(1,4)→(1,3)→→(0,0)。
改善后GA得到5次的最優(yōu)結果均為52.74,而常規(guī)5次運算得到的揀選距離都大于60,顯然不如改善后的AGA效果好,所以圖5中AGA的揀選順序要優(yōu)于GA的揀選順序。
6 結束語
針對物資倉庫存在的諸多實際問題,基于某電力企業(yè)倉庫實際情況,分析了實際中堆垛機在揀選作業(yè)時的速度與定位控制問題,給出了針對該固定貨架模型揀選作業(yè)的特點。利用MATLAB軟件進行編碼和導入參數,證明改善后的AGA在解決揀選路徑優(yōu)化問題時,其收斂速度快于常規(guī)GA,收斂結果也優(yōu)于常規(guī)GA。同時也驗證了經過路徑優(yōu)化后的模型合理性,可以提高整個倉庫的運行效率。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
現代企業(yè)(2015年2期)2015-02-28 18:45:09