基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng)設(shè)計(jì)
2021-06-30 12:44:34閔小翠周益全
計(jì)算機(jī)測量與控制 2021年6期
閔小翠,朱 君,李 鵬,2,周益全
(1.廣州華立科技職業(yè)學(xué)院 計(jì)算機(jī)信息工程學(xué)院,廣州 511325;2.華南理工大學(xué) 計(jì)算機(jī)科學(xué)與工程學(xué)院,廣州 511325)
0 引言
無人機(jī)作為無線信息通信技術(shù)、遠(yuǎn)程控制技術(shù)、空氣動力學(xué)技術(shù)等多學(xué)科快速發(fā)展應(yīng)用下的綜合性產(chǎn)物,已經(jīng)廣泛應(yīng)用于工業(yè)生產(chǎn)、農(nóng)業(yè)生產(chǎn)、地質(zhì)勘探以及國防安保等多個領(lǐng)域。其主要應(yīng)用價值在于無人操控的精準(zhǔn)性。無人操控解決了作業(yè)環(huán)境條件對人員的限制,通過高精度控制,完成目標(biāo)任務(wù)的操作。其中,無人機(jī)飛行軌跡的循跡功能,能夠使無人機(jī)根據(jù)環(huán)境變量關(guān)系[1],自主學(xué)習(xí)、分析環(huán)境物體關(guān)系[2],自行尋找最優(yōu)飛行線路。在循跡過程中,圖像。坐標(biāo)等數(shù)據(jù)的識別精度是決定循跡效果的關(guān)鍵。
根據(jù)對現(xiàn)有不同旋翼無人機(jī)循跡檢測系統(tǒng)的作業(yè)日志分析發(fā)現(xiàn),隨著旋翼數(shù)量的增加,傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng)的循跡數(shù)據(jù)開放聚合程度越高。不同傳感器異步數(shù)據(jù)所產(chǎn)生的不對稱數(shù)據(jù),在很大程度上降低了循跡檢測系統(tǒng)的檢測效率,導(dǎo)致無人機(jī)在空中懸停時間過長,電量判斷異常無法成功返航等循跡相關(guān)問題。為了解決開放聚合方案在傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng)上出現(xiàn)的問題,有必要提出一種新的多旋翼循跡檢測系統(tǒng),從根源上解決上述問題。
1 基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng)總框架設(shè)計(jì)
基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng)總框架設(shè)計(jì)如圖1所示,總共分為兩個部分:

圖1 基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng)總框架設(shè)計(jì)示意圖
1)基于離散傅里葉變換的多旋翼無人機(jī)循跡數(shù)據(jù)變換算力支持硬件,主要通過多路傳感器信息采集控制主控,對多旋翼無人機(jī)軌跡進(jìn)行數(shù)據(jù)綜合分析,利用基于傅里葉變換計(jì)算架構(gòu)設(shè)計(jì)處理器,配合多路數(shù)據(jù)離散電路,對開環(huán)數(shù)據(jù)進(jìn)行閉環(huán)數(shù)據(jù)轉(zhuǎn)換處理。其中主要依托外部接入的遠(yuǎn)端大型云服務(wù)器提供數(shù)據(jù)離散轉(zhuǎn)換過程中需要的浮點(diǎn)計(jì)算能力。設(shè)計(jì)硬件功能側(cè)重點(diǎn)在于數(shù)據(jù)的采集與轉(zhuǎn)換過程中計(jì)算數(shù)據(jù)的本地?cái)?shù)據(jù)化處理。為軟件算法以及程序代碼運(yùn)行提供硬件平臺。
2)基于離散傅里葉變換的多旋翼無人機(jī)循跡數(shù)據(jù)變換計(jì)算程序,即設(shè)計(jì)系統(tǒng)的算法執(zhí)行軟件。根據(jù)設(shè)計(jì)軟件程序的作用面,可分為數(shù)據(jù)離散處理程序與循跡數(shù)據(jù)傅里葉變換輸出程序兩部分。通過兩組程序的功能設(shè)計(jì),實(shí)現(xiàn)在硬件數(shù)據(jù)資源與算力的支持下,將多旋翼無人機(jī)循跡數(shù)據(jù)相關(guān)參量由聚合形態(tài),經(jīng)離散傅里葉變換計(jì)算,轉(zhuǎn)換為閉環(huán)數(shù)據(jù)處理形態(tài)[3-4],從而優(yōu)化循跡數(shù)據(jù)識別精準(zhǔn)度,提升系統(tǒng)對循跡任務(wù)的整體效果。
2 基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng)硬件結(jié)構(gòu)設(shè)計(jì)
多旋翼無人機(jī)循跡數(shù)據(jù)采集硬件包括:數(shù)據(jù)傳感器、數(shù)據(jù)邏輯變阻器與信號分量控制器;在功能實(shí)現(xiàn)過程中,首先通過RX5403數(shù)據(jù)傳感器對多旋翼無人機(jī)多路傳感器數(shù)據(jù)進(jìn)行數(shù)據(jù)接口鏈路對接,然后由AD4431數(shù)據(jù)采集控制器通過對接鏈路采集無人機(jī)軌跡數(shù)據(jù),并將數(shù)據(jù)傳輸至數(shù)據(jù)邏輯變阻器進(jìn)行離散前的信號電路值變換,以此完成離散處理設(shè)備工作,最后由信號分量控制器調(diào)制輸出。多旋翼無人機(jī)循跡數(shù)據(jù)采集硬件設(shè)計(jì)結(jié)構(gòu),如圖2所示。

圖2 多旋翼無人機(jī)循跡數(shù)據(jù)采集硬件設(shè)計(jì)結(jié)構(gòu)
2.1 數(shù)據(jù)傳感器
通過RX5403數(shù)據(jù)傳感器對多旋翼無人機(jī)多路傳感器數(shù)據(jù)進(jìn)行數(shù)據(jù)接口鏈路對接,RX5403數(shù)據(jù)傳感器包括采集系統(tǒng)、檢測元件、轉(zhuǎn)換電路。檢測元件可分為光柵尺和直線感應(yīng)同步器。這種檢測元件具有很強(qiáng)的無線傳輸能力。RX5403數(shù)據(jù)傳感器的傳輸速率可以達(dá)到3 Mbps。設(shè)定輸出功率和頻率后,就可以很好地完成信號的發(fā)送和無線交互收發(fā)。
2.2 數(shù)據(jù)邏輯變阻器
選用B722 系列變阻器作為系統(tǒng)硬件的數(shù)據(jù)邏輯變阻器。它具有允許工作溫度較高,寬額定電壓范圍較大的特點(diǎn),過數(shù)據(jù)邏輯變阻器進(jìn)行離散前信號電路值變換,包含一組信號差量運(yùn)算,算式如下所示:
(1)
其中:Δζ代表設(shè)計(jì)硬件的離散數(shù)據(jù)采集變量,L1、L2、L3分別是控制量、采集量、離散量的硬件預(yù)置系數(shù),上述參數(shù)為B722 系列變阻器的系統(tǒng)預(yù)制參數(shù)。
2.3 信號分量控制器
在大多數(shù)情況下,信號適調(diào)是由具有一種或多種信號適調(diào)功能的獨(dú)立儀器單元及其組合完成的。但是,隨著技術(shù)的發(fā)展,一部分信號適調(diào)功能并入傳感器中,而另一部分信號適調(diào)功能并入數(shù)據(jù)記錄儀器或數(shù)據(jù)采集與記錄儀器系統(tǒng)。信號適調(diào)器主要采用兩種前置放大器:電壓放大器和電荷放大器。在多旋翼無人機(jī)循跡檢測系統(tǒng)硬件結(jié)構(gòu)中,信號GL827L適調(diào)器是檢測系統(tǒng)的重要組成部分。傳感器的輸出信號均需要經(jīng)過適調(diào),以系統(tǒng)傳輸?shù)囊蟆P盘栠m調(diào)器主要包括信號變換器、放大器、濾波器、微分器和積分器及電源。
3 基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng)軟件設(shè)計(jì)
3.1 數(shù)據(jù)離散處理程序設(shè)計(jì)
考慮到多旋翼無人機(jī)不同傳感器信號同步存在一定量的誤差,因此在循跡過程中需要與不同旋翼數(shù)據(jù)進(jìn)行數(shù)據(jù)對稱,以此提升循跡數(shù)據(jù)識別處理的精準(zhǔn)度。基于上述思想,需要對統(tǒng)一的數(shù)據(jù)處理結(jié)構(gòu)進(jìn)行離散處理,利用設(shè)計(jì)硬件的算力基礎(chǔ)條件,配合數(shù)據(jù)離散處理程序,完成對多旋翼無人機(jī)循跡數(shù)據(jù)的離散處理。設(shè)計(jì)程序原理與實(shí)現(xiàn)過程如下:
首先對無人機(jī)不同傳感器反饋的軌跡數(shù)據(jù)信息進(jìn)行權(quán)值與閾值關(guān)系梳理優(yōu)化。通過梳理將多旋翼無人機(jī)反饋數(shù)據(jù)的權(quán)值與閾值轉(zhuǎn)換為實(shí)數(shù)量值,并對其量值的賦予,賦予值范圍定義為0~1[5]之間的任意數(shù)。然后,通過離散算法來實(shí)現(xiàn)對數(shù)據(jù)結(jié)構(gòu)的離散轉(zhuǎn)換輸出。在此之前,需要將無人機(jī)循跡數(shù)據(jù)網(wǎng)絡(luò)對應(yīng)的函數(shù)進(jìn)行離散激活,使其滿足S型函數(shù)條件[6],然后通過離散數(shù)據(jù)構(gòu)成與數(shù)據(jù)特征,獲得不同類型數(shù)據(jù)所對應(yīng)的最佳循跡特征,從而減小不同傳感器反饋循跡數(shù)據(jù)之間的均方差。程序功能實(shí)現(xiàn)的函數(shù)表達(dá)方式如下:
(2)
式中,yz,w,代表第w個傳感器反饋的第z個循跡數(shù)據(jù)量;Uz,w代表第w個傳感器反饋的第z個離散值;f代表載入旋翼反饋數(shù)據(jù)總量;d代表程序調(diào)用算法的總線程數(shù)量。下面是數(shù)據(jù)離散處理程序算法實(shí)現(xiàn)的偽代碼示例:
category.msgbus=WARN/Win32DbgAppender, ConsoleAppender//離散/open
log4j/.categor/TBarBiz=WARN/
Win32DbgAppender/ConsoleAppender/TBarBizFileAppender*
log4j.category/TBarMsgMgr=WARN
Win32DbgAppender//ConsoleAppender/ TBarMsgMgrFileAppender
log4j.category.IMWebBridge=INFO/
/
Win32DbgAppender/ConsoleAppender*
IMWebBridgeFileAppender
log4j.additivity.SdkRender=FALSE
#log4j.additivity.msgbus=5
#log4j.additivity.TBarBiz=FALSE
#log4j.additivity.TBarMsgMgr=1
log4j.additivity/ChatMsgMgr=FALSE
log4j.additivity/IMWebBridge=0
#log4j/additivity/Http=FALSE
Log5/appender.Win32DbgAppender=org.apache/log4j/Win32DebugAppender
log4j.appender.Win32DbgAppender.layout.ConversionPattern=%d{} %p %c %m%n
log4j.appender.ConsoleAppender.layout.ConversionPattern=%d{} %p %c %m%n
數(shù)據(jù)離散處理程序功能實(shí)現(xiàn)流程,如圖3所示。

圖3 數(shù)據(jù)離散處理程序功能實(shí)現(xiàn)流程
通過上述對不同旋翼反饋循跡數(shù)據(jù)的離散計(jì)算后,程序?qū)⒌玫揭唤M循跡軌跡的IMF分量數(shù)據(jù)[7],通常情況下,分量數(shù)據(jù)由6階函數(shù)構(gòu)成[8],因此將其定義為6階IMF分量數(shù)據(jù)。根據(jù)分量數(shù)據(jù)可得到不同分量對旋翼移動軌跡的坐標(biāo)、高度、氣壓等循跡相關(guān)指數(shù)信息,為了保證設(shè)計(jì)系統(tǒng)最終循跡輸出結(jié)果的精準(zhǔn)滿足0.5 m級精度,將獲得分量定義為下級傅里葉變換計(jì)算的樣本數(shù)據(jù)。具體定義實(shí)現(xiàn)流程如圖4所示。

圖4 離散分量樣本化轉(zhuǎn)換實(shí)現(xiàn)過程
3.2 循跡數(shù)據(jù)傅里葉變換輸出程序設(shè)計(jì)
完成對多旋翼無人機(jī)循跡數(shù)據(jù)的離散程序設(shè)計(jì)后,對系統(tǒng)循跡數(shù)據(jù)傅里葉變換程序進(jìn)行設(shè)計(jì)。程序設(shè)計(jì)主要目的在于對離散數(shù)據(jù)傳輸通道內(nèi)的回路進(jìn)行閉環(huán)轉(zhuǎn)換,防止開環(huán)通道的聚合特性[9-11]引入冗余數(shù)據(jù),干擾精準(zhǔn)數(shù)據(jù)離散循跡特征的對比識別。從而保證輸出的循跡檢測結(jié)果的精準(zhǔn)度[12-14]。
ty代表離散循跡信號。離散后的信號隸屬于正弦零均值信號,對其進(jìn)行變換權(quán)值系數(shù)的賦予權(quán)限并輸出。
循跡數(shù)據(jù)傅里葉變換輸出程序閉環(huán)變換功能實(shí)現(xiàn)分為以下 3 個步驟:
1)對載入的離散循跡信號o0進(jìn)行傅里葉信號振蕩,振蕩后得到傅里葉變換信號o0g,對載入離散循跡信號的振蕩頻率與幅值進(jìn)行計(jì)算[15-18]。
(3)
式中,s0、sl、ml代表傅里葉系數(shù),ξ代表程序變換過程中載入的預(yù)置角頻率。
2)在計(jì)算環(huán)境中釋放一個小幅值、頻率一致的測試信號tv,利用測試信號獲得循跡信號測試載入接口與識別輸出接口之間的數(shù)據(jù)精度相位差與優(yōu)化比[19-21]。
tv=Svsin(ξy+φv)
(4)
式中,對幅值Sv取值范圍設(shè)置為15%~25%;最大化匹配相近的循跡數(shù)據(jù)相位φv,保證振蕩信號在變換過程中的精度損失最小。將變換后的數(shù)據(jù)信號進(jìn)行輸出前的二次傅里葉變換,可得到:
(5)
od=Sdsin(ξy+φs)
(6)
由此程序可通過變換計(jì)算獲得相位差φdv=φd-φv與增益比i=Sd/Sv兩組變換核心數(shù)據(jù)量。
3)進(jìn)一步,程序可通過相位差計(jì)算,獲得優(yōu)化后的循跡數(shù)據(jù)識別輸出信號為:
(7)
4 對比實(shí)驗(yàn)
對設(shè)計(jì)的基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng)多旋翼無人機(jī)循跡效率進(jìn)行對比實(shí)驗(yàn)。
4.1 實(shí)驗(yàn)設(shè)計(jì)
實(shí)驗(yàn)采用對比方式來進(jìn)行,實(shí)驗(yàn)共分為兩個部分,分別為多旋翼無人機(jī)循跡檢測精度對比實(shí)驗(yàn)與多旋翼無人機(jī)循跡檢測響應(yīng)對比實(shí)驗(yàn),然后通過多旋翼無人機(jī)循跡效率公式計(jì)算得出實(shí)驗(yàn)系統(tǒng)的循跡效率,根據(jù)效率值得出實(shí)驗(yàn)結(jié)論。
具體實(shí)驗(yàn)步驟如下:
1)利用X86架構(gòu)計(jì)算與Windows平臺構(gòu)建測試環(huán)境,并將設(shè)計(jì)系統(tǒng)接入測試環(huán)境,同時引入傳統(tǒng)無人機(jī)循跡檢測系統(tǒng)作為對比實(shí)驗(yàn)系統(tǒng);
2)在測試環(huán)境中導(dǎo)入一組常規(guī)型多旋翼無人機(jī)飛行數(shù)據(jù);
3)分別由設(shè)計(jì)系統(tǒng)與傳統(tǒng)檢測系統(tǒng)進(jìn)行循跡數(shù)據(jù)的精度檢測,數(shù)據(jù)采用隨機(jī)抽取的方式獲得。抽取樣本數(shù)據(jù)量為10;
4)對比數(shù)據(jù)得出小結(jié)實(shí)驗(yàn)結(jié)論;
5)在相同環(huán)境條件下,分別獲取設(shè)計(jì)系統(tǒng)與傳統(tǒng)檢測系統(tǒng)循跡數(shù)據(jù)的響應(yīng)數(shù)據(jù);
6)對比數(shù)據(jù)得出小結(jié)實(shí)驗(yàn)結(jié)論;
7)根據(jù)無人機(jī)循跡效率公式計(jì)算得出實(shí)驗(yàn)系統(tǒng)的循跡效率;
對比效率值,得出最終實(shí)驗(yàn)結(jié)論。
4.2 設(shè)計(jì)系統(tǒng)與傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng)循跡檢測精度對比實(shí)驗(yàn)
根據(jù)上述4.1實(shí)驗(yàn)步驟,得到設(shè)計(jì)系統(tǒng)與傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng)循跡檢測精度對比結(jié)果,如表1所示。

表1 設(shè)計(jì)系統(tǒng)與傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng)
通過對比表1中的實(shí)驗(yàn)結(jié)果發(fā)現(xiàn),提出設(shè)計(jì)的系統(tǒng)能夠?qū)o人機(jī)軌跡數(shù)據(jù)檢測識別誤差控制在0.010~0.090 m范圍內(nèi),在循跡檢測誤差實(shí)量轉(zhuǎn)換下的誤差控制范圍小于0.1 m;相比之下,傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng)的無人機(jī)國際數(shù)據(jù)檢測識別誤差范圍較大,且不穩(wěn)定;基于上述數(shù)據(jù)對比,可證明設(shè)計(jì)系統(tǒng)具有改善循跡檢測精度的效果。
4.3 設(shè)計(jì)系統(tǒng)與傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng)循跡檢測響應(yīng)對比實(shí)驗(yàn)
根據(jù)上述4.1實(shí)驗(yàn)步驟,得到設(shè)計(jì)系統(tǒng)與傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng)循跡檢測響應(yīng)對比結(jié)果,如表2所示。
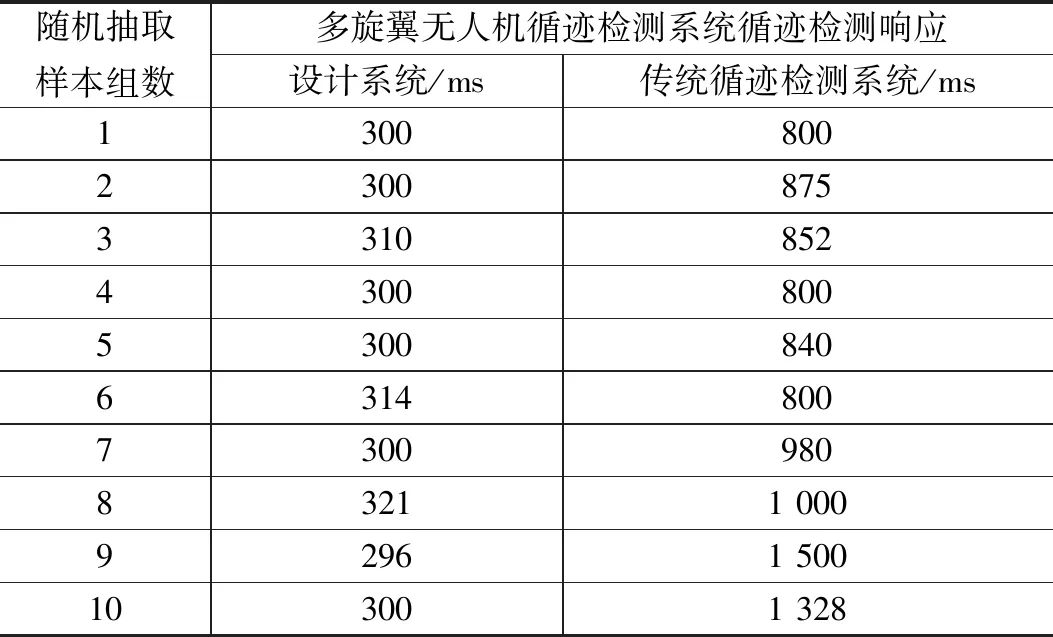
表2 設(shè)計(jì)系統(tǒng)與傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng)
通過表2實(shí)驗(yàn)結(jié)果對比發(fā)現(xiàn),提出設(shè)計(jì)的基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng),在循跡檢測響應(yīng)時間上,明顯快于傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng),且響應(yīng)時間毫秒值提升效果明顯,由此可證,在此次實(shí)驗(yàn)中,設(shè)計(jì)的基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng)通過了多旋翼無人機(jī)循跡檢測響應(yīng)測試。
4.4 循跡檢測效率數(shù)據(jù)計(jì)算
對上述兩組實(shí)驗(yàn)中表1、表2的結(jié)果數(shù)據(jù)進(jìn)行多旋翼無人機(jī)循跡檢測效率計(jì)算,通過計(jì)算獲得設(shè)計(jì)系統(tǒng)與傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng)的檢測效率,計(jì)算公式如下:
(8)
式中,F(xiàn)代表多旋翼無人機(jī)循跡檢測效率;Q代表多旋翼無人機(jī)循跡檢測精度;T代表多旋翼無人機(jī)循跡檢測響應(yīng)系數(shù)。根據(jù)公式得到計(jì)算后的設(shè)計(jì)系統(tǒng)與傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng)的檢測效率,如表3所示。

表3 設(shè)計(jì)系統(tǒng)與傳統(tǒng)多旋翼無人機(jī)循跡
4.5 綜合實(shí)驗(yàn)結(jié)論
綜上所述,根據(jù)表3計(jì)算結(jié)果可以看出,提出設(shè)計(jì)基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng),循跡檢測整體效率較傳統(tǒng)多旋翼無人機(jī)循跡檢測效率提升效果明顯。由此可以證明,提出設(shè)計(jì)的基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng),滿足設(shè)計(jì)與實(shí)際應(yīng)用要求,具有較高的推廣性與應(yīng)用性。
5 結(jié)束語
文章對傳統(tǒng)多旋翼無人機(jī)循跡檢測系統(tǒng)存在的問題進(jìn)行了深入研究,針對性提出了基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng)設(shè)計(jì),并對設(shè)計(jì)系統(tǒng)的硬件與軟件功能、結(jié)構(gòu)進(jìn)行了詳細(xì)描述。通過對比實(shí)驗(yàn)數(shù)據(jù)證明了提出設(shè)計(jì)的有效性。基于離散傅里葉變換的多旋翼無人機(jī)循跡檢測系統(tǒng)設(shè)計(jì)的提出與完成,為無人機(jī)循跡研究與應(yīng)用,提供了新的研究思路與應(yīng)用解決方案。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:25:42
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
