基于傳感器融合技術的自動感應尋車系統設計
2021-07-01 12:49:16邱小紅
裝備維修技術 2021年50期
邱小紅
摘 要:傳統尋車系統的自動感應尋車時間較長,尋車效果較差,因此本文設計基于傳感器融合技術的自動感應尋車系統。選擇STM32F103主控芯片與AD9854信號發生芯片,設計車輛傳感器與超聲波傳感器;建立自動尋車功能模塊,細化系統功能;基于傳感器融合技術預測用戶停車行為,提高尋車時間;集成自動尋車終端,進而實現自動感應尋車效果。通過對比實驗驗證新系統的尋車時間更短,尋車效果更佳,達到了系統設計目的。
關鍵詞:傳感器融合技術;自動感應;尋車系統;主控芯片
中圖分類號:U121 文獻標識碼:A
1硬件設計
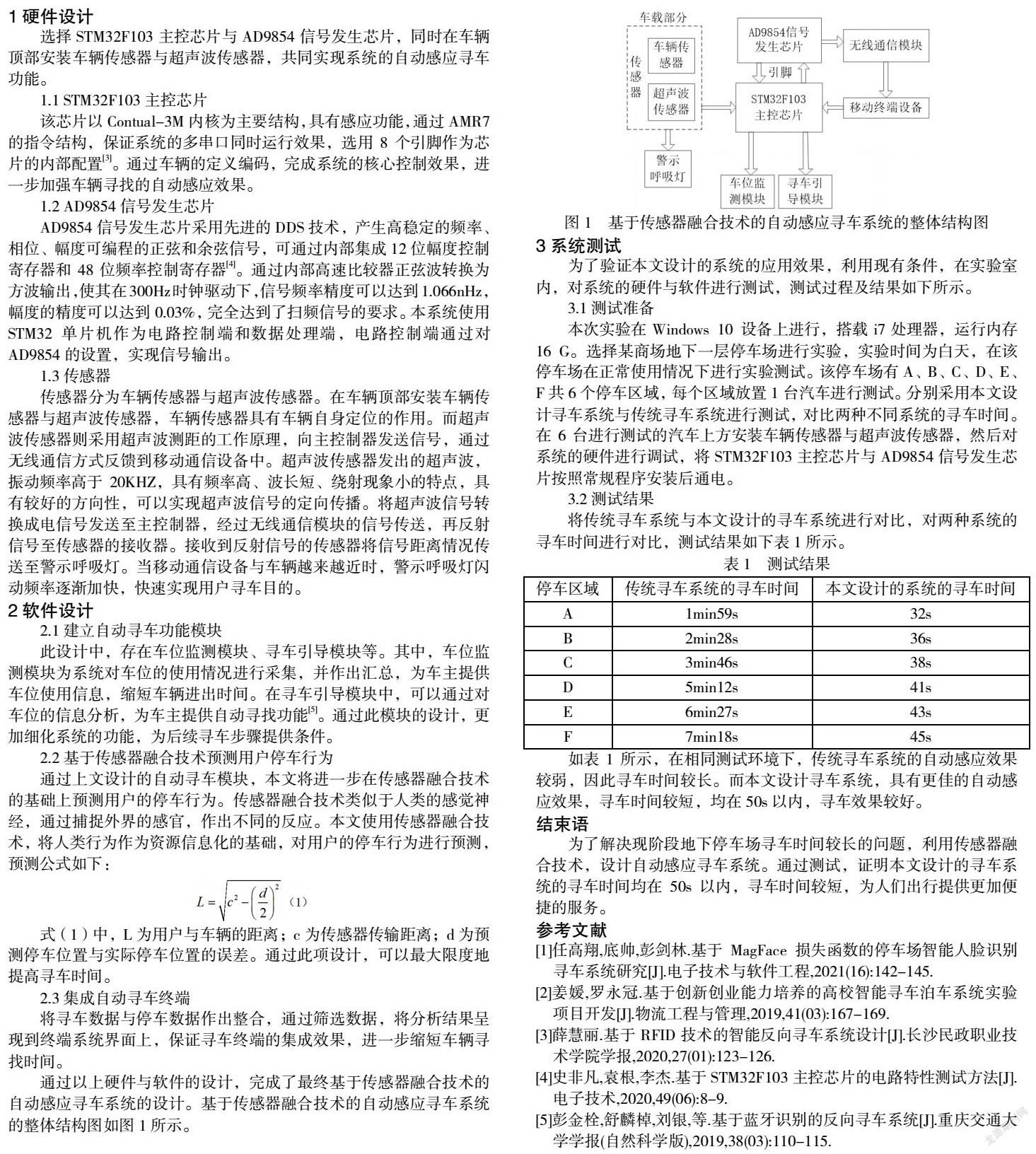
選擇STM32F103主控芯片與AD9854信號發生芯片,同時在車輛頂部安裝車輛傳感器與超聲波傳感器,共同實現系統的自動感應尋車功能。
1.1 STM32F103主控芯片
該芯片以Contual-3M內核為主要結構,具有感應功能,通過AMR7的指令結構,保證系統的多串口同時運行效果,選用8個引腳作為芯片的內部配置[3]。通過車輛的定義編碼,完成系統的核心控制效果,進一步加強車輛尋找的自動感應效果。
1.2 AD9854信號發生芯片
AD9854信號發生芯片采用先進的DDS技術,產生高穩定的頻率、相位、幅度可編程的正弦和余弦信號,可通過內部集成12位幅度控制寄存器和48位頻率控制寄存器[4]。通過內部高速比較器正弦波轉換為方波輸出,使其在300Hz時鐘驅動下,信號頻率精度可以達到1.066nHz,幅度的精度可以達到0.03%,完全達到了掃頻信號的要求。本系統使用STM32單片機作為電路控制端和數據處理端,電路控制端通過對AD9854的設置,實現信號輸出。
1.3傳感器
傳感器分為車輛傳感器與超聲波傳感器。在車輛頂部安裝車輛傳感器與超聲波傳感器,車輛傳感器具有車輛自身定位的作用。而超聲波傳感器則采用超聲波測距的工作原理,向主控制器發送信號,通過無線通信方式反饋到移動通信設備中。超聲波傳感器發出的超聲波,振動頻率高于20KHZ,具有頻率高、波長短、繞射現象小的特點,具有較好的方向性,可以實現超聲波信號的定向傳播。將超聲波信號轉換成電信號發送至主控制器,經過無線通信模塊的信號傳送,再反射信號至傳感器的接收器。接收到反射信號的傳感器將信號距離情況傳送至警示呼吸燈。當移動通信設備與車輛越來越近時,警示呼吸燈閃動頻率逐漸加快,快速實現用戶尋車目的。
2軟件設計
2.1建立自動尋車功能模塊
此設計中,存在車位監測模塊、尋車引導模塊等。其中,車位監測模塊為系統對車位的使用情況進行采集,并作出匯總,為車主提供車位使用信息,縮短車輛進出時間。在尋車引導模塊中,可以通過對車位的信息分析,為車主提供自動尋找功能[5]。通過此模塊的設計,更加細化系統的功能,為后續尋車步驟提供條件。
2.2基于傳感器融合技術預測用戶停車行為
通過上文設計的自動尋車模塊,本文將進一步在傳感器融合技術的基礎上預測用戶的停車行為。傳感器融合技術類似于人類的感覺神經,通過捕捉外界的感官,作出不同的反應。本文使用傳感器融合技術,將人類行為作為資源信息化的基礎,對用戶的停車行為進行預測,預測公式如下:
式(1)中,L為用戶與車輛的距離;c為傳感器傳輸距離;d為預測停車位置與實際停車位置的誤差。通過此項設計,可以最大限度地提高尋車時間。
2.3集成自動尋車終端
將尋車數據與停車數據作出整合,通過篩選數據,將分析結果呈現到終端系統界面上,保證尋車終端的集成效果,進一步縮短車輛尋找時間。
通過以上硬件與軟件的設計,完成了最終基于傳感器融合技術的自動感應尋車系統的設計。基于傳感器融合技術的自動感應尋車系統的整體結構圖如圖1所示。
3系統測試
為了驗證本文設計的系統的應用效果,利用現有條件,在實驗室內,對系統的硬件與軟件進行測試,測試過程及結果如下所示。
3.1測試準備
本次實驗在Windows 10 設備上進行,搭載i7處理器,運行內存16 G。選擇某商場地下一層停車場進行實驗,實驗時間為白天,在該停車場在正常使用情況下進行實驗測試。該停車場有A、B、C、D、E、F共6個停車區域,每個區域放置1臺汽車進行測試。分別采用本文設計尋車系統與傳統尋車系統進行測試,對比兩種不同系統的尋車時間。在6臺進行測試的汽車上方安裝車輛傳感器與超聲波傳感器,然后對系統的硬件進行調試,將STM32F103主控芯片與AD9854信號發生芯片按照常規程序安裝后通電。
3.2測試結果
將傳統尋車系統與本文設計的尋車系統進行對比,對兩種系統的尋車時間進行對比,測試結果如下表1所示。
如表1所示,在相同測試環境下,傳統尋車系統的自動感應效果較弱,因此尋車時間較長。而本文設計尋車系統,具有更佳的自動感應效果,尋車時間較短,均在50s以內,尋車效果較好。
結束語
為了解決現階段地下停車場尋車時間較長的問題,利用傳感器融合技術,設計自動感應尋車系統。通過測試,證明本文設計的尋車系統的尋車時間均在50s以內,尋車時間較短,為人們出行提供更加便捷的服務。
參考文獻
[1]任高翔,底帥,彭劍林.基于MagFace損失函數的停車場智能人臉識別尋車系統研究[J].電子技術與軟件工程,2021(16):142-145.
[2]姜媛,羅永冠.基于創新創業能力培養的高校智能尋車泊車系統實驗項目開發[J].物流工程與管理,2019,41(03):167-169.
[3]薛慧麗.基于RFID技術的智能反向尋車系統設計[J].長沙民政職業技術學院學報,2020,27(01):123-126.
[4]史非凡,袁根,李杰.基于STM32F103主控芯片的電路特性測試方法[J].電子技術,2020,49(06):8-9.
[5]彭金栓,舒麟棹,劉銀,等.基于藍牙識別的反向尋車系統[J].重慶交通大學學報(自然科學版),2019,38(03):110-115.
