利用泄漏電纜實現的隧道內偽衛星定位方法
2021-07-01 05:21:48宋茂忠
物聯網技術 2021年6期
關鍵詞:信號
崔 暢,宋茂忠
(南京航空航天大學,江蘇 南京 211106)
0 引 言
全球導航衛星系統(GNSS)可在全球范圍內實現全天候、高精度的實時定位。但是由于鋼筋混凝土對衛星信號的遮擋,難以在隧道內為用戶提供衛星導航服務。
近年來,隨著隧道數量的增加,人們對隧道內定位的需求也日益增長。隧道定位可以幫助車輛確定自身位置,減少交通事故的發生。此外由于隧道的相對封閉性,一旦隧道內發生塌方等安全事故時,隧道定位可以幫助救援人員迅速確定待救援者的位置,最大限度降低事故損失。
目前關于隧道定位的研究有多種方案,主流的定位技術包括超寬帶(UWB)定位[1]、WiFi網絡定位[2]、射頻識別(RFID)定位[3]、ZigBee定位[4]以及偽衛星定位等。偽衛星定位通過在隧道內播發與真實衛星類似的偽衛星信號實現隧道定位。該方法與其他方法相比優點明顯,可以實現隧道內外定位一體化,同時信號發射功率低,抗干擾能力強。但由于偽衛星定位在隧道內會出現嚴重的遠近效應問題,使得偽衛星定位技術在隧道中的應用場景較少。
本文提出的隧道定位方案基于偽衛星定位技術,利用2臺衛星導航模擬器模擬真實衛星在隧道兩端分別發射衛星導航信號。同時在隧道內鋪設一條同軸泄漏電纜連接2臺衛星導航模擬器的發射端,利用同軸泄漏電纜的槽孔向外界輻射信號,大大減小了遠近效應問題的影響,實現了直線隧道內的一維定位。
1 定位衛星的選取
位于隧道兩端的衛星導航模擬器可以通過對真實衛星信號進行模擬發射來實現隧道定位,但是此舉也改變了衛星信號的傳播路徑,導致信號傳播路徑與計算偽距路徑不一致。隧道定位信號傳播距離的幾何關系如圖1所示。
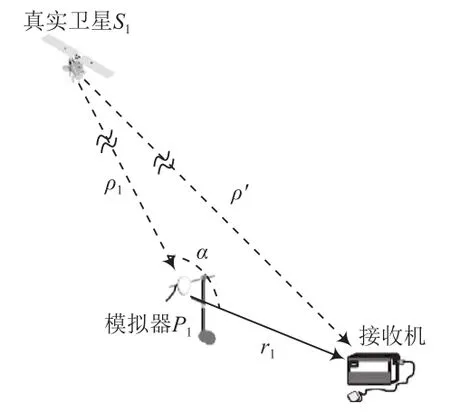
圖1 隧道定位信號傳播距離的幾何關系
衛星導航模擬器位于隧道端點處,模擬器P1發射信號的真實傳播路徑為r1,真實衛星S1到模擬器P1的偽距為ρ1,所以接收端實際測得的測距值為r1+ρ1,真實衛星S1到接收機的偽距為ρ',角度α為真實衛星S1與隧道的夾角。理想偽距與實際偽距之間的誤差為:

式中:R1為真實衛星S1到模擬器P1的真距;R'為真實衛星S1到接收機的真距。
真實衛星到接收機S1的真距R'為:

α的取值范圍為(0°,180°),根據三角形定理可知,角度α越大,R'越接近R1與r1之和,誤差e就越小。角度α與衛星仰角β以及衛星的投影點與隧道之間的夾角γ(0°~ 90°)有關,如式(3)所示 :

需要盡量選取仰角β與角度γ較小的衛星,以減小理想偽距與實際偽距之間的誤差。同時考慮到絕大多數的接收機將仰角大于15°的衛星視為可見星[5],所以本方案尋找的衛星的仰角應該滿足這一條件。
本方案設置隧道的起點坐標(0°0′3.225 8″N,50°0′0″E),模擬搭設的隧道長度為100 m,隧道終點坐標為(0°0′0″N,50°0′0″E),選用 2019年 5月 5日 22:00接收到的符合仰角β和角度γ要求的G14、G16、G22和G27可見星。選用的4顆衛星仰角β范圍為20°~30°,角度γ在30°以內。隧道端口的2臺衛星導航模擬器分別通過同軸泄漏電纜向隧道內發射2路射頻信號,位于隧道內的接收機接收到4路射頻信號并產生定位結果。
隧道定位信號產生如圖2所示,由上位機、衛星導航模擬器以及同軸泄漏電纜實現。
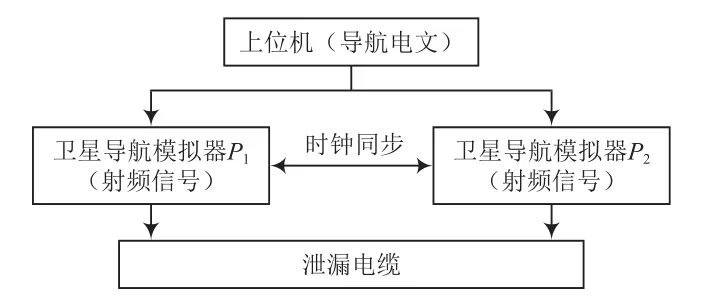
圖2 隧道定位信號產生示意圖
首先在上位機端設置用戶初始參數,尋找角度合適的衛星,根據星歷和歷書產生導航電文,將用戶初始參數和導航電文傳輸給衛星導航模擬器。
衛星導航模擬器位于隧道兩端,負責解析衛星的導航電文,并根據中頻信號的算法模型計算出衛星傳播時延,得到初始碼相位和載波相位等初始參數以及多普勒頻偏等更新參數,生成中頻信號,并通過射頻調制到GPS的L1頻段,通過同軸泄漏電纜發出。
同軸泄漏電纜由內導體、絕緣介質和開有槽孔的外導體組成,電磁波在泄漏電纜中縱向傳輸的同時通過槽孔向外界輻射電磁波。同軸泄漏電纜的傳輸損耗非常低,可以降低遠近效應產生的影響。
2 泄漏電纜傳播誤差分析與修正
本方案使用了同軸泄漏電纜傳播信號,大大改善了遠近效應的問題。但是由于信號在同軸泄漏電纜中的傳播速度遠小于在空氣中的傳播速度,因此會引起偽距誤差。假設通過接收機測得的衛星導航模擬器發射信號的傳播路徑為di,信號經同軸泄漏電纜從模擬器到接收機的真實傳播路徑為ri,則ri與di的關系為:

引起的偽距誤差如下:

式中:v為射頻信號在同軸泄漏電纜中的傳播速度;c為光速。傳播速度v的值經測為2.569 588×108m/s。將c和v代入式(5),得到:

真實傳播路徑ri的取值范圍為(0,100 m),根據式(6)可以看出偽距誤差和真實傳播路徑成正比關系,且在真實傳播路徑為100 m時,偽距誤差達到最大,約16.75 m。過大的偽距誤差會增大定位的位置信息偏差[6],所以需要對這部分偽距誤差進行修正。
本方案采用UTREK210接收機,它會采集4路射頻信號并輸出中頻數據,通過軟件解算得到星歷、歷書、導航電文、NMEA消息以及原始觀測量等數據。由于原始觀測量中偽距信息未修正,所以需要先對偽距信息進行誤差修正,再解算產生定位信息。
對于偽距的修正步驟如下:
(1)使用衛星導航模擬器發射3次射頻信號;
(2)前2次發射過程中分別將接收機放置于衛星導航模擬器P1和P2附近,分別得到G14和G22衛星到接收機P1的偽距ρ1和ρ2,G16和G27衛星到接收機的偽距ρ3和ρ4;
(3)第三次發射過程中測試人員攜帶接收機從衛星導航模擬器P1的位置向衛星導航模擬器P2的位置緩慢行走,根據解算產生的原始觀測量數據得到G14、G22、G16和G27衛星到接收機的偽距分別為ρ11、ρ22、ρ33和ρ44。偽距修正公式如下:

ρ'11、ρ'22、ρ'33和ρ'44分別為修正后的 G14、G22、G16 和G27到接收機的偽距,v為信號在同軸泄漏電纜中的傳播速度,c為光速。
3 位置信息解算
在修正泄漏電纜引起的偽距誤差后,需要根據修正后的偽距信息解算得到修正后的位置信息。信號傳輸的數學模型為:

式中:ρ為修正后的偽距;R為衛星到接收機的真距;I為電離層延遲;T為對流層延遲;δts為衛星鐘差;δtu為接收機鐘差。
首先進行電離層延遲修正。電離層位于地面上空距離地面50~1 000 km的區域,電磁波在穿過電離層時傳播路徑和傳播速度均會發生變化,造成幾米乃至幾十米的誤差。電離層延遲公式為:
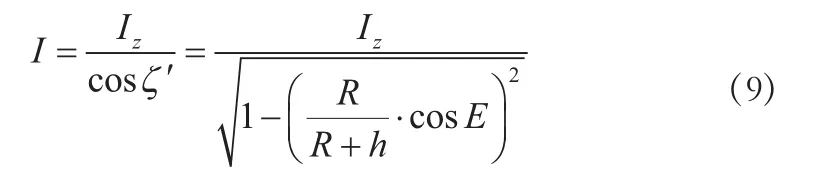
式中:h表示電離層的高度;R為地球半徑;E表示仰角;ζ'表示信號穿刺電離層的交點處的衛星天頂角;Iz為采用Klobuchar模型[7]對電離層進行修正得到的電離層垂直延遲。對流層是地球大氣層中最靠近地面的一層。電磁波在經過對流層時會受到非色散介質的影響產生折射。由于導航電文內部無關于對流層修正的相關參數,而且難以得到實時氣象參數來修正對流層模型,因此本方案采用了一種簡易模型來修正對流層延遲,計算公式為:

根據星歷數據得到衛星的軌道參數,求得衛星發射時刻的衛星位置。之后將衛星在軌道坐標系的坐標轉化為在地心坐標系的坐標。
根據式(11)解算接收機在隧道內的位置。
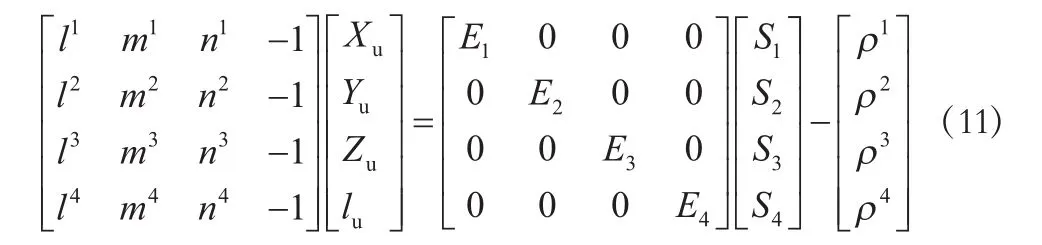


衛星個數為4時,得到:

首次計算出的結果一般不準確,需要迭代直至滿足規定的限差。最后把地心坐標系中的坐標轉化為大地經緯度B、L和橢球高H即可得到實際位置坐標。
4 測試驗證
本方案選用建筑物走廊模擬隧道環境。2臺衛星導航模擬器分別位于走廊的兩端,相距100 m,模擬器P1的設定坐標為(0°0′ 3.225 8″ N,50°0′ 0″ E),P2的設定坐標為(0°0′0″ N,50°0′ 0″ E),分別為隧道北端和南端位置。2 臺模擬器之間連接同軸泄漏電纜。 測試人員攜帶UTREAK210接收機從模擬器P1的位置向模擬器P2的位置緩慢行走,接收機采集泄漏電纜輻射出的射頻信號并輸出中頻數據,通過軟件解算得到星歷、歷書、導航電文以及原始觀測量等數據,對原始觀測量中的偽距信息進行修正,產生最終定位結果。
捕獲的衛星通道狀態和星座圖如圖3所示。接收機成功捕獲到4顆衛星,解擴后衛星信號載噪比均大于40 dB,符合載噪比的指標要求[8-10],并且4顆衛星的仰角和方位角均符合設計要求。
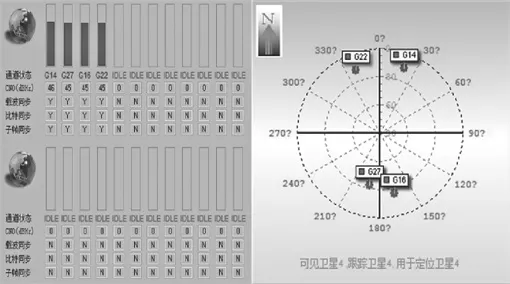
圖3 捕獲的信號通道狀態和星座圖
接收機位于隧道兩端的定位坐標如圖4所示,與理論坐標之間的誤差在10 m以內。
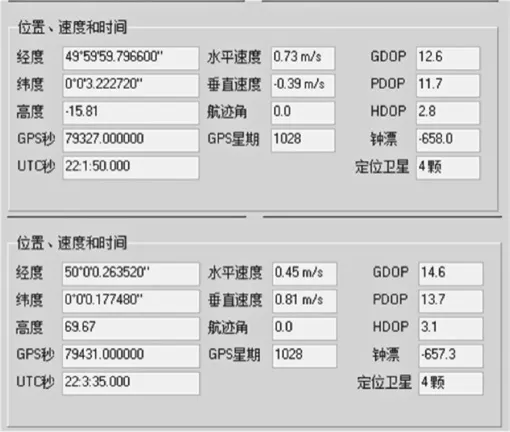
圖4 隧道兩端定位坐標
將修正后的位置信息導入MATLAB中,利用MATLAB得到接收機的運動軌跡如圖5所示。定位軌跡為自北向南的一條軌跡,長度約為100 m,軌跡的誤差在10 m以內,經計算得到均方差為4.554 m。
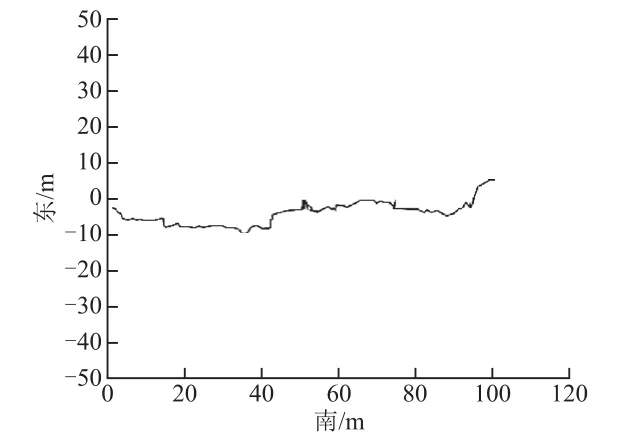
圖5 定位軌跡
5 結 語
針對偽衛星在隧道定位中產生嚴重的遠近效應的問題,本文提出了一種利用泄漏電纜實現的隧道內偽衛星定位方法。在上位機端設置用戶的初始參數,尋找仰角與方位角合適的衛星,并產生導航電文。衛星導航模擬器解析導航電文并計算出衛星傳播時延,得到初始碼相位和載波相位等初始參數以及多普勒頻偏等更新參數,生成中頻信號并調制到射頻輸出。利用接收機對隧道兩端的衛星導航模擬器發出的射頻信號進行捕獲和跟蹤,對偽距信息進行修正并利用最小二乘法解算,得到誤差在10 m以內的定位信息并輸出定位軌跡,大幅減少了遠近效應的影響。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
