某型動車組中間直流母線過壓故障分析
2021-07-01 05:22:12黃樹剛黃衛斌
物聯網技術 2021年6期
關鍵詞:故障
黃樹剛,黃衛斌,劉 哲
(中車永濟電機有限公司 檢測實驗中心,陜西 西安 710018)
0 引 言
在單相交流供電的電氣化鐵路上,為使電力系統三相負荷盡可能平衡,接觸網通常采用分段換相供電,每隔20~30 km設置一段供電絕緣區域,即分相區。接觸網在分相區兩側由不同兩相進行供電,在分相區內則無供電。動車組采用自動過分相的方式,控制單元接收到過分相信號后,封鎖四象限整流器脈沖。為保證旅客乘坐的舒適性,在過分相過程中,車上的照明、空調、冷卻裝置等輔助設備需要正常工作,動車組輔助系統需要持續工作,僅依靠變流器的中間支撐電容儲能難以維持輔助系統的持續工作,因此牽引逆變器需切換到制動模式,維持中間直流母線電壓,為輔助系統供電[1-3]。
某型動車組在線路運行時,第02,04,05車同時報中間直流母線過壓,牽引變流器切除,最后剩07車牽引變流器無法維持輔助系統運行,07車牽引變流器也被切除,導致全列牽引丟失,影響到動車組正常運行。通過車載故障數據分析,故障發生在動車組過分相時刻,故障原因為過分相時牽引逆變器產生的功率大于輔助變流器消耗的功率,造成中間直流母線過壓。本文通過變流器系統和過分相時中壓保持策略,結合車載故障數據分析研究,優化過分相時的中壓保持策略以解決此類故障。
1 牽引系統和控制策略
1.1 牽引系統介紹
動車組牽引系統拓撲結構如圖1所示。受電弓從25 kV接觸網獲得電能,通過牽引變壓器降壓后供給四象限整流器,四象限整流器將牽引變壓器二次側單相交流電轉變成系統要求的3 600 V直流電,通過四象限控制算法使牽引變流器網側功率因數接近1。中間直流回路主要起到儲能和穩定中間直流電壓的作用,將中間直流母線電壓保持在3 600 V左右并保證能量傳遞時的瞬時功率平衡。中間直流母線回路的3 600 V直流電一路經過牽引逆變器的變換,向牽引電動機提供電壓、頻率可調的三相交流電源,實現動車組的牽引、制動等功能;另一路經輔助變流器換成三相380 V/50 Hz正弦交流電壓提供給各類輔助負載[4-5]。
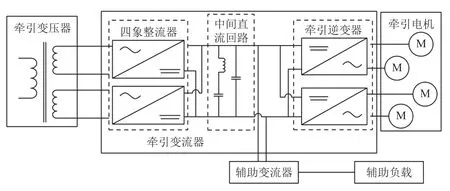
圖1 牽引系統拓撲圖
列車在牽引工況運行時,牽引電機工作在電動機狀態,牽引逆變器工作在逆變狀態,能量從中間直流環節流向牽引電機。列車在再生制動工況運行時,牽引電機工作在發電機狀態,牽引逆變器工作在整流狀態,可將牽引電機制動產生的能量回饋至中間直流母線,再經四象限逆變回饋至電網[6]。
1.2 過分相時中間電壓保持策略
動車組在采用自動過分相的方式,在過分相時,主斷路器斷開,失去網側對牽引系統的供電,四象限整流器停止工作,此時為保證車載空調、照明、冷卻裝置等輔助設備的正常工作,使牽引變流器工作在中間直流電壓保持模式。中間直流電壓保持模式下牽引變流器不再受控于列車控制級發送的牽引或制動指令,僅根據輔助供電系統的功率需求,由變流器控制單元控制中間直流電壓保持穩定,利用再生制動反饋的能量保證輔助變流器及必要負載設備持續正常工作,進入輔助供電模式[7-8]。
進入過分相輔助供電模式后,牽引系統從牽引狀態轉變為制動狀態,以保持中間直流電壓的平穩。電機實際轉矩Te=Te0+Te1,Te0為機車初始制動轉矩,可根據Te0=P/n算出,P為初始輔助系統的功率,n為電機轉速;根據P=UI可算出實時的輔助功率,Te1為機車轉矩調整值。過分相時轉矩輸出控制邏輯如圖2所示[9]。
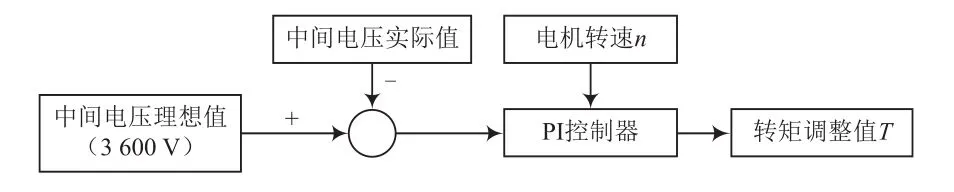
圖2 過分相轉矩輸出邏輯控制圖
過分相時進入輔助供電模式時,主要包括初始制動和中間直流電壓閉環控制兩個過程。
(1)初始制動過程。當檢測到過分相開始信號后,在四象限還未停機之前,牽引逆變器進入初始制動狀態為輔助提供能量。
(2)中間直流電壓閉環控制。當檢測到過分相開始信號后,在四象限停機之后,牽引逆變器進入中間直流電壓閉環控制。
2 故障數據分析
2.1 車載故障數據
動車組在運行過程中,因第02、04和05車同時報中間直流母線過壓,牽引丟失,惰性運行降速至110 km/h,經機械師做牽引輔助復位后故障消除。故障時刻02車車載數據記錄見表1所列,故障時刻車速151 km/h。
表1中過分相預信號為1,主斷路器狀態為1,可以看出故障發生在動車組接收到過分相預信號,主斷斷開之前,開始時四象限狀態為1代表四象限還在工作時,牽引逆變器處于根據輔助功率進行初始制動的過程,初始制動階段中間電壓穩定的維持在3 340 V左右。當四象限狀態為0代表四象限停機后,中間直流母線電壓從3 507 V升高到4 000 V以上,超出中間直流母線一級保護閾值3 950 V,報出中間直流母線故障。可以看出中間直流母線過壓故障發生在初始制動過程和中間直流電壓閉環控制切換的過程中。
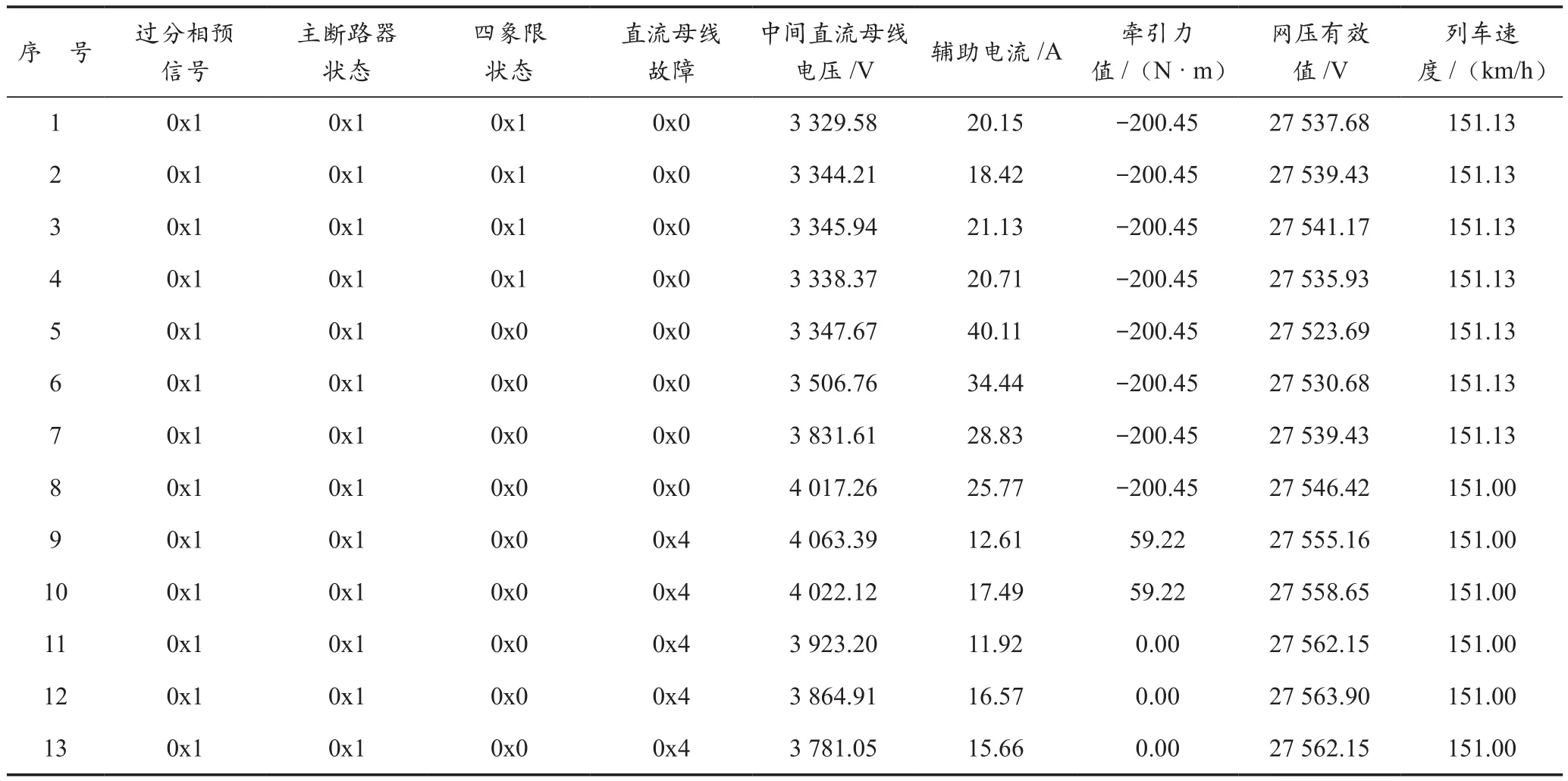
表1 02車車載故障數據
2.2 故障數據分析
動車組齒輪箱傳動比為2.517,取半磨耗輪徑值885 mm,可計算轉速(單位:r/min)和車速(單位:km/h)變換比為15.01。故障時刻車速為151.13 km/h,則電機轉速為:

如果單臺電機施加的牽引力值T為-200.45 N·m,一臺牽引變流器控制4臺電機,則牽引逆變器提供的總功率(單位為kW)為:

鑒于車載故障數據的采樣速度和精度,取故障前5個點的數據平均值,直流母線電壓Udc為3 341.15 V,輔助輸入電流IAPS為24.10 A,則輔助系統消耗功率(單位:kW)為:

由式(2)和式(3)計算結果可以看出,牽引逆變器提供的功率大于輔助消耗的功率。過分相時初始轉矩設為200 N·m是按照輔助滿載工況(220 kVA,功率因數為0.85)設置的。式(2)的計算結果與軟件設置預期結果一致,但實際車上輔助負載偏小。從式(3)的計算結果看,當時的輔助功率為80.52 kW,接近半載。
中間直流母線過壓的原因是由于在過分相時牽引逆變器初始制動最小轉矩設置偏高,導致牽引逆變器提供的功率大于輔助消耗的功率,從而導致中間直流母線過壓。04車和05車故障數據和分析計算結果與02車類似,此處不再贅述。
3 解決措施及效果
3.1 故障處理措施
優化牽引逆變器控制軟件,將200 km/h以下過分相初始轉矩最小值由-200 N·m改為-10 N·m,同時將過分相時牽引逆變器的加載斜率由3 000 N·m/s改為4 000 N·m/s。
3.2 故障處理效果
根據軟件優化前后動車組的車載故障數據,整理和統計出過分相時直流母線過壓故障次數,軟件優化前后故障情況對比結果見表2所列。由表2可知,軟件優化前過分相時各車均有直流母線過壓故障發生,一個月內過分相時直流母線過壓故障總共發生10次,軟件優化后運行一季度,再無此類故障發生,說明軟件優化明顯,解決措施有效。
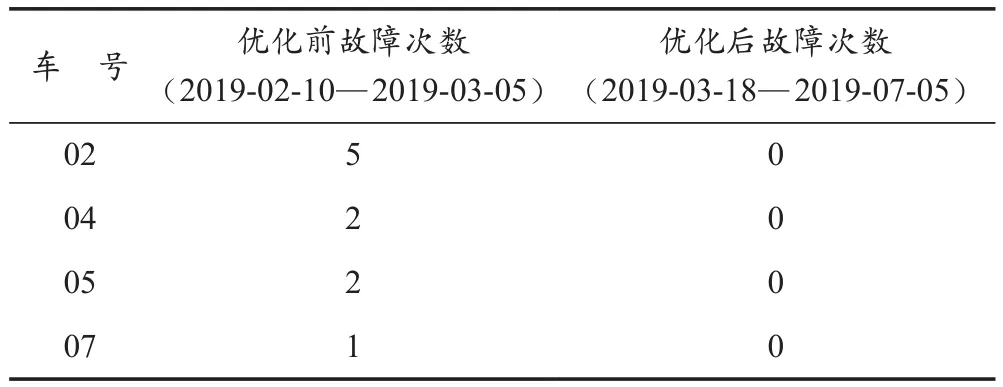
表2 軟件優化前后過分相時直流母線過壓故障情況對比
4 結 語
動車組直流母線過壓故障發生在過分相時刻,牽引系統過分相時的初始制動轉矩是按照輔助系統滿載工況[10](200 kVA)考慮的,而實際運行時,輔助系統并非滿載工作,軟件初始制動轉矩設置偏大,導致動車組過分相時牽引逆變器發揮的功率大于輔助系統消耗的功率,造成中間直流母線過壓故障,通過調整軟件初始制動轉矩和加載斜率,解決了動車組過分相時直流母線過壓故障,提高了動車組運行的可靠性和穩定性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
