基于改進型滑模觀測器的永磁同步電動機無位置控制研究
2021-07-01 08:50:45李慧穎郭海宇
機電信息 2021年17期
李慧穎 郭海宇

摘 要:針對無傳感器控制技術中,采用傳統滑模觀測器進行測量的永磁同步電動機存在抖振的問題,提出了一種改進型滑模觀測器,增加卡爾曼濾波器濾除高次諧波,增加鎖相環使控制系統能夠更加準確地獲得轉子位置信息與電動機轉速,減小控制系統的估計誤差。
關鍵詞:永磁同步電動機;無位置控制;滑模觀測器;卡爾曼濾波器;鎖相環
0 引言
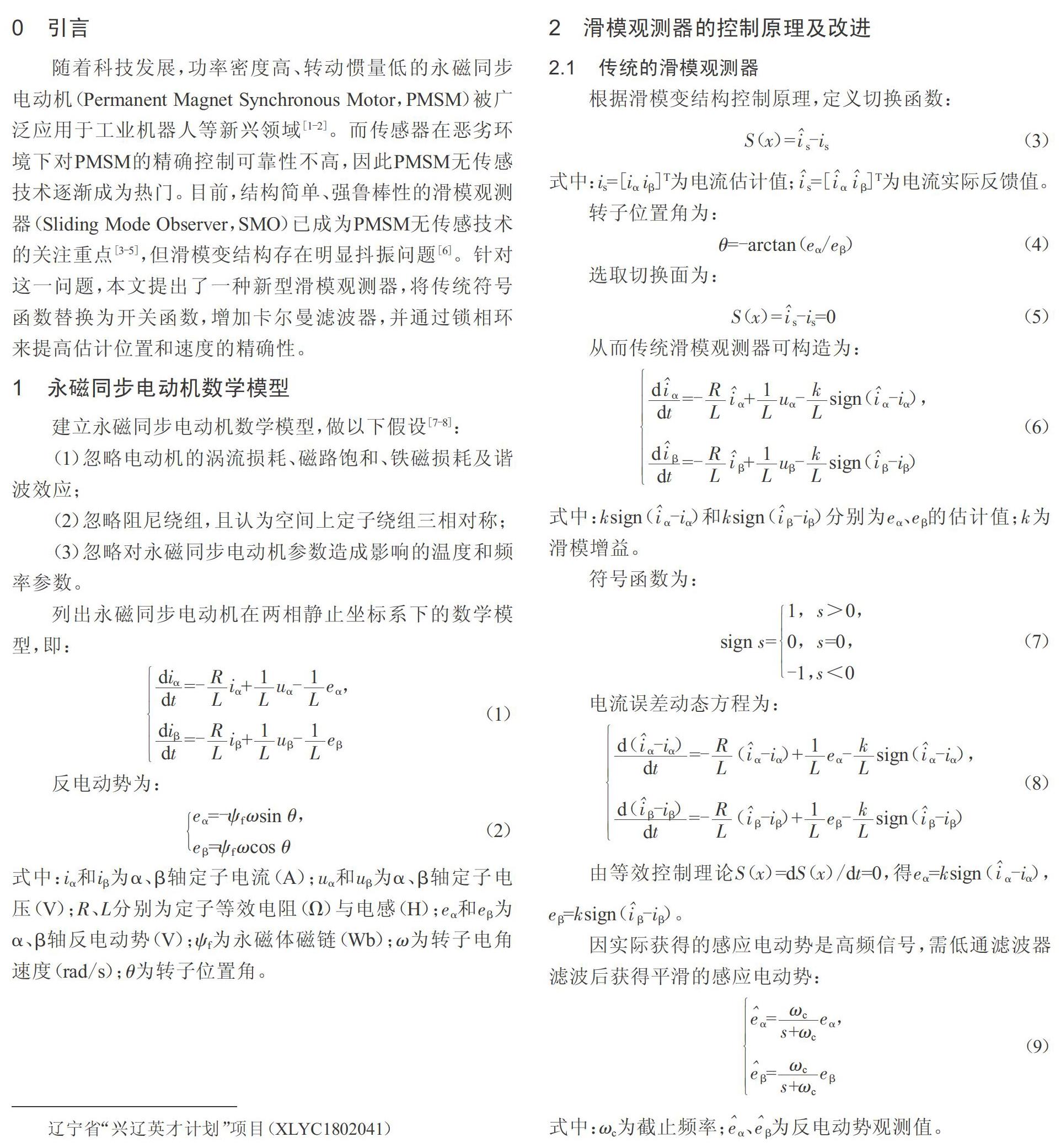
隨著科技發展,功率密度高、轉動慣量低的永磁同步電動機(Permanent Magnet Synchronous Motor,PMSM)被廣泛應用于工業機器人等新興領域[1-2]。而傳感器在惡劣環境下對PMSM的精確控制可靠性不高,因此PMSM無傳感技術逐漸成為熱門。目前,結構簡單、強魯棒性的滑模觀測器(Sliding Mode Observer,SMO)已成為PMSM無傳感技術的關注重點[3-5],但滑模變結構存在明顯抖振問題[6]。針對這一問題,本文提出了一種新型滑模觀測器,將傳統符號函數替換為開關函數,增加卡爾曼濾波器,并通過鎖相環來提高估計位置和速度的精確性。
1 永磁同步電動機數學模型
建立永磁同步電動機數學模型,做以下假設[7-8]:
(1)忽略電動機的渦流損耗、磁路飽和、鐵磁損耗及諧波效應;
(2)忽略阻尼繞組,且認為空間上定子繞組三相對稱;
(3)忽略對永磁同步電動機參數造成影響的溫度和頻率參數。
新型滑模觀測器結構如圖2所示。
3 系統仿真分析
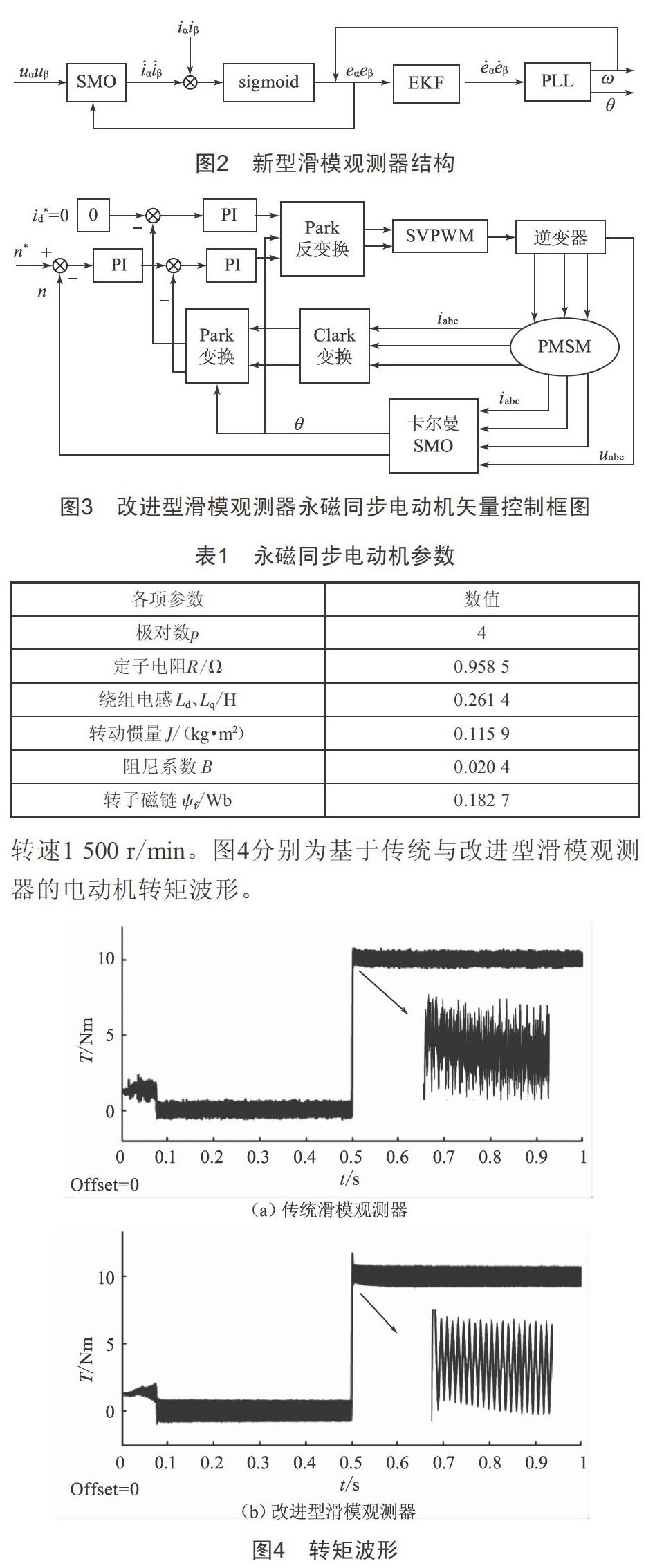
采用id=0的矢量控制方式,PMSM改進型滑模觀測器矢量控制框圖如圖3所示。表1為本文使用的電動機參數。
給定電動機啟動時負載轉矩為0 Nm,0.5 s時突變為10 Nm,轉速1 500 r/min。圖4分別為基于傳統與改進型滑模觀測器的電動機轉矩波形。
由圖4可知,電動機在啟動時轉矩有一定的波動,大約0.07 s后趨于穩定;0.5 s時負載由0 Nm突變為10 Nm,轉矩也隨之產生一定的波動,最終達到穩定狀態。但是由局部放大圖可知,傳統滑模觀測器轉矩波動突出,而改進型滑模觀測器轉矩波動明顯平緩,轉矩波動問題得到明顯改善。
圖5和圖6分別為兩者的估計轉速與實際轉速比較波形和轉速誤差波形。由圖可知,傳統滑模觀測器轉速誤差極大,且轉速抖動明顯,而改進型轉速誤差明顯減小,且曲線平滑,抖動現象明顯改善,可驗證本文所提的改進型滑模觀測器估計算法較傳統方法的精確性。
圖7為基于改進型滑模觀測器的電動機估計轉子位置與實際轉子位置的比較波形。由圖可知,在轉矩突變前后,電動機實際轉子位置與估計轉子位置之間的誤差都很小,幾乎沒有抖動,轉矩突變后也能繼續準確地跟蹤轉子位置。
當電動機低速負載運行時,給定轉速為500 r/min,負載轉矩為10 Nm。圖8為實際轉速與估算轉速對比波形,電動機轉速較低時反電動勢較小,造成觀測精度不高,可見傳統滑模觀測器性能不夠好。由圖9可知,雖然在電動機啟動階段兩者誤差都較大,但改進型滑模觀測器估計精度更高,基本沒有誤差,同樣體現出本文所提的改進型滑模觀測器估計算法較傳統方法的精確性。
4 結語
本文設計了一種改進型滑模觀測器,采用sigmoid函數,增加卡爾曼濾波器濾除高頻干擾,減小抖振,并采用鎖相環提取電動機的轉速與位置信息。在Matlab/Simulink系統中建立了仿真模型,并進行對比,證明了本文所提出的改進方案對轉子位置和速度的估計值與實際誤差較小,滿足設計需求,驗證了該方法的可行性和優越性,可以進一步在永磁同步電動機的研究與應用中推廣。
[參考文獻]
[1] 谷善茂,何鳳有,譚國俊,等.永磁同步電動機無傳感器控制技術現狀與發展[J].電工技術學報,2009,24(11):14-20.
[2] 張立偉,李行,宋佩佩,等.基于新型滑模觀測器的永磁同步電機無傳感器矢量控制系統[J].電工技術學報,2019,34(S1):70-78.
[3] KIM H,SON J,LEE J.A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J].IEEE Transactions on Industrial Electronics,2011,58(9):4069-4077.
[4] 孫杰,崔巍,范洪偉,等.基于滑模觀測器的永磁同步電機無傳感器矢量控制[J].電機與控制應用,2011,38(1):38-42.
[5] 林茂,李穎暉,吳辰,等.基于滑模模型參考自適應系統觀測器的永磁同步電機預測控制[J].電工技術學報,2017,32(6):156-163.
[6] 王愷成,楊明發.基于改進型滑模觀測器的永磁同步電動機矢量控制[J].電氣技術,2019,20(10):29-34.
[7] 陳伯時.電力拖動自動控制系統——運動控制系統[M].3版.北京:機械工業出版社,2006.
[8] 譚建成.永磁無刷直流電機技術[M].北京:機械工業出版社,2011.
收稿日期:2021-04-01
作者簡介:李慧穎(1995—),女,河北衡水人,在讀碩士研究生,研究方向:電力電子與電力傳動技術。
通信作者:郭海宇(1986—),女,遼寧沈陽人,師資博士后,講師,碩士生導師,研究方向:控制理論與應用及電力電子技術。
