基于TMS320F28075的永磁同步電機無位置傳感器控制
2021-07-02 02:00:40尹勝利王春秀
導航與控制 2021年2期
尹勝利,王春秀
(1.貴州航天林泉電機有限公司,貴陽550081;2.北京航天時代激光導航技術有限責任公司,北京100094)
0 引言
近年來,永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)因其結(jié)構(gòu)簡易、功率密度高、效率高等突出優(yōu)點而被廣泛應用于家電、工控、導航等領域[1-3]。PMSM雙閉環(huán)控制需利用位置傳感器提供轉(zhuǎn)子位置信息,常用的位置傳感器分為光電編碼器、霍爾傳感器、旋轉(zhuǎn)變壓器等。然而,位置傳感器有可能發(fā)生損壞,在部分有容錯控制需求的特殊應用中,要使用無位置傳感器算法代替出現(xiàn)故障的位置傳感器完成實時獲取轉(zhuǎn)子位置信息的功能。此外,無位置傳感器算法也能完全取代位置傳感器,從而有效降低系統(tǒng)成本與體積。
近年來,無位置傳感器控制方法始終是PMSM控制領域的研究熱點。無位置傳感器控制方法主要可分為兩類:一類是基于反電動勢或磁鏈估計,主要適用于中高速范圍,如滑模觀測器、非線性觀測器、Kalman濾波器、磁鏈觀測器等[4-7];另一類則是基于凸極效應的高頻注入方法,主要適用于較低速范圍,如脈振高頻注入法、旋轉(zhuǎn)高頻注入法、方波高頻注入法等[8-10]。目前,還沒有能夠適用于全速度范圍的方法。一般的解決方式是在零低速段使用高頻注入法或I/f起動等方法,在中高速段則切換至基于反電動勢或磁鏈的方法。切換過程中可能會出現(xiàn)抖動等問題,可在過渡區(qū)間對兩類方法所得位置或速度信息進行加權(quán)處理。
在基于反電動勢或磁鏈觀測的策略中,反電動勢滑模觀測器是一種較為簡單實用的方法,但反電動勢是通過濾波方式獲取,所以需要對位置信息估計值進行相位補償。部分改進方法則利用了反電動勢的擴展狀態(tài)模型,構(gòu)造全階觀測器,以達到不使用相位補償?shù)哪康?但缺點是需要多進行一部分運算,而且算法中會使用速度估計值,這增加了算法復雜度。
本文在實現(xiàn)以德州儀器公司的浮點型DSP產(chǎn)品TMS320F28075為控制核心的永磁同步電機控制系統(tǒng)的基礎上,使用了一種非線性觀測器,然后通過反正切運算提取位置與速度信息,該觀測器具有結(jié)構(gòu)簡單、無需使用速度估計信息等優(yōu)點。本文對一臺750W的電機進行了實驗測試,實驗結(jié)果驗證了該非線性觀測器的有效性。
1 控制系統(tǒng)設計
1.1 硬件設計
圖1為永磁同步電機無位置傳感器控制系統(tǒng)的硬件設計框圖。本文采用TI公司生產(chǎn)的浮點型DSP產(chǎn)品TMS320F28075作為數(shù)字控制器,數(shù)字控制器的主要功能為接收轉(zhuǎn)速控制指令、監(jiān)測電流信號、完成所有軟件算法等。本文選用霍爾電流傳感器采集三相電流信號,電流采樣信號經(jīng)過信號調(diào)理電路后輸入至DSP的模-數(shù)轉(zhuǎn)換器(ADC)外設。其中,信號調(diào)理電路使用運算放大器及其外圍電路實現(xiàn)低通濾波與放大等功能。由DSP輸出6路PWM信號,經(jīng)驅(qū)動單元放大后,控制IGBT器件通斷,從而生成電壓信號。
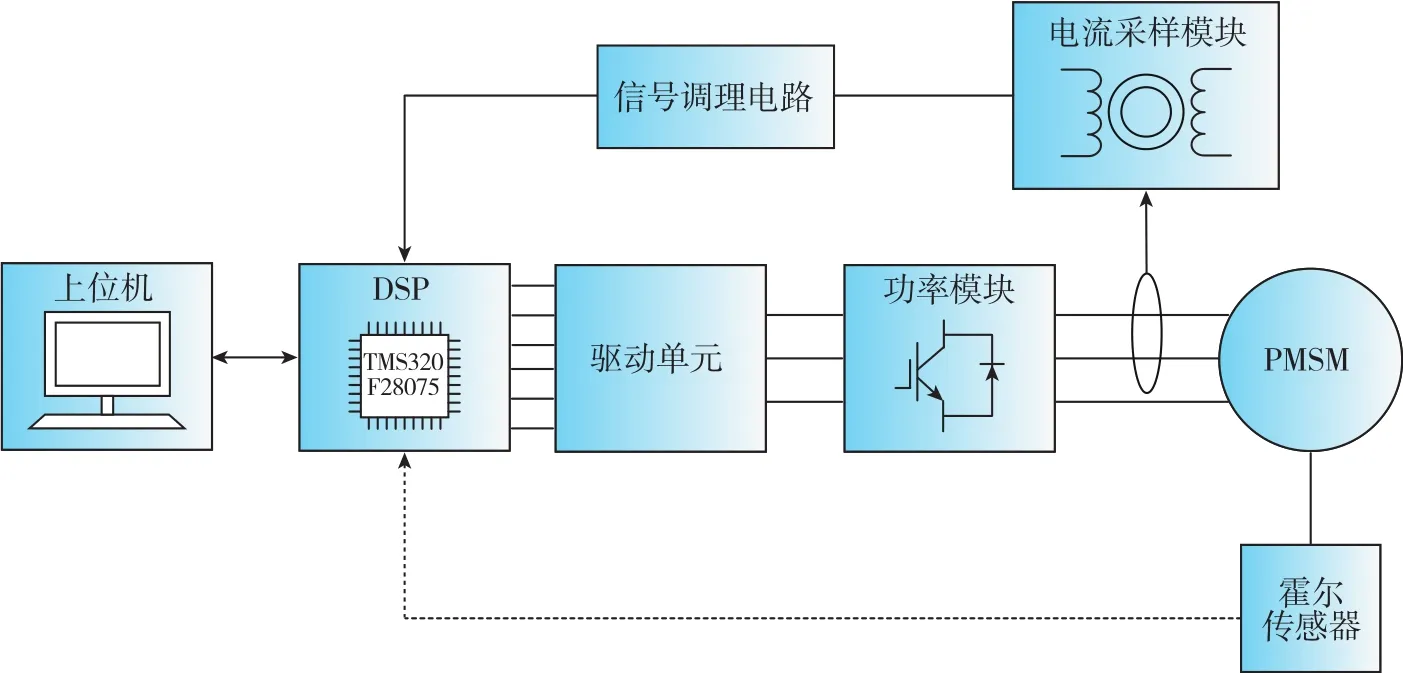
圖1 永磁同步電機無位置傳感器控制系統(tǒng)硬件框圖Fig.1 Hardware block diagram of the sensorless control system for PMSM
1.2 軟件設計
ADC有多種觸發(fā)方式,要保證電流值盡量準確,應選擇在PWM計數(shù)器發(fā)生上溢時觸發(fā)SOC單元,然后再進行采樣。為保證兩路電流信號采集的同步性,分別在ADCA與ADCB的SOC0通道對兩路信號進行轉(zhuǎn)換。電機控制信號為三組互補PWM波,所以需要設置三組周期相同且同步輸出的ePWM外設。ePWM外設為同步鏈式結(jié)構(gòu),為保證三組PWM波的同步性,通過軟件配置使ePWM7、ePWM8、ePWM9與 ePWM4模塊同步,并由ePWM4模塊觸發(fā)ADC外設的電流采樣程序,而ePWM4模塊本身并不輸出PWM信號。
矢量控制程序在ADC中斷中執(zhí)行,算法流程圖如圖2所示。首先,通過ADC進行電流信號采樣,同時獲取位置與轉(zhuǎn)速信息,進行矢量變換得到旋轉(zhuǎn)坐標系下的電流值。然后,進行速度環(huán)與電流環(huán)運算。最后,經(jīng)過反Park變換后,電流環(huán)輸出的電壓指令輸入到SVPWM模塊中計算電壓矢量作用時間,并由ePWM模塊輸出PWM調(diào)制波,通過功率器件生成電壓控制信號。由于無位置傳感器算法相當于低分辨率的位置傳感器,一般情況下,在速度環(huán)與電流環(huán)參數(shù)調(diào)試過程中,應設置較低的帶寬。
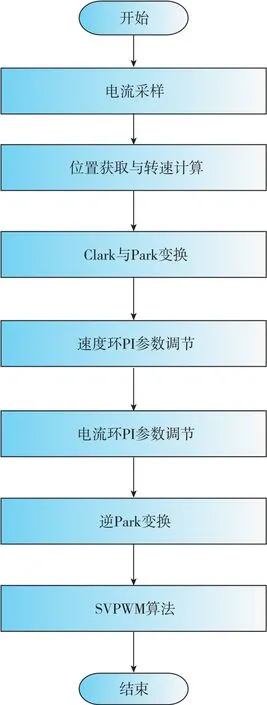
圖2 PMSM矢量控制方法流程圖Fig.2 Flowchart of the vector control method for PMSM
2 無位置傳感器控制方法
2.1 永磁同步電機模型
PMSM在靜止坐標系下的電氣模型為

式(1)、 式(2)中,uα、uβ分別為α軸、β軸的電壓(V),iα、iβ分別為α軸、β軸的電流(A),eα、eβ分別為α軸、β軸的反電動勢(V),Rs為定子電阻(Ω),Ls為定子電感(H)。
靜止坐標系下的反電動勢方程為

式(3)、 式(4)中,ψf為永磁體磁鏈(Wb),ωe為轉(zhuǎn)子電角速度(rad/s),θe為轉(zhuǎn)子電角度(rad)。 由式(3)、式(4)可知,反電動勢模型中包含速度信息。因此,如果以擴展反電動勢方程為基礎構(gòu)造無位置傳感器算法,則要將速度估計值迭代到算法中,這增加了算法復雜度。
2.2 非線性觀測器算法及其離散化
本文使用的非線性觀測器僅利用電機模型,不直接使用反電動勢的擴展狀態(tài)方程,所以不會出現(xiàn)速度項。 將式(3)、 式(4)分別代入式(1)、式(2)中, 則式(1)、 式(2)變換為
定義非線性觀測器中的狀態(tài)變量


對式(7)、 式(8)求導, 有

定義新變量y1與y2

將式(9)、 式(10)代入式(5)、 式(6)中, 可得如式(13)、式(14)所示的微分方程關系,該微分方程作為構(gòu)造非線性觀測器的基礎模型。
定義如下映射關系
根據(jù)式(7)、 式(8)、 式(15)、 式(16), 可得

以式(13)、 式(14)所構(gòu)造的模型為基礎, 非線性觀測器可表示為式(19)、式(20)的形式。該觀測器以時變系數(shù)為增益,永磁體磁鏈平方值作為輸出,文獻[11]證明了該類非線性觀測器結(jié)構(gòu)的穩(wěn)定性。

式(19)、 式(20)中, 符號 “^” 表示該變量的估計值,λ為觀測器中唯一需要調(diào)節(jié)的參數(shù)(λ>0)。
本文不使用鎖相環(huán)、速度觀測器等復雜方法,而是直接使用反正切方法獲取位置與速度信息。根據(jù)式(18),可得如下關系


綜上所述,無位置傳感器估算方法框圖如圖3所示。

圖3 無位置傳感器估算方法框圖Fig.3 Block diagram of the sensorless estimation method
下面對觀測器算法進行離散化處理,以符合數(shù)字控制要求。設Ts為系統(tǒng)采樣頻率,使用前向差分法對式(19)、式(20)進行變換,可得如下關系
對式(21)、 式(22)進行離散化, 最終得到位置與速度的數(shù)字計算方式

3 實驗驗證
3.1 實驗平臺介紹
基于TMS320F28075型DSP的永磁同步電機實驗平臺如圖4所示。實驗用電機功率為750W,相電阻為0.72Ω,相電感為3.93mH,永磁體磁鏈為0.06Wb,極對數(shù)為5。使用觀測器法估計轉(zhuǎn)子位置并參與矢量控制算法,觀測器參數(shù)λ取2000,PWM斬波與中斷頻率均為10kHz。
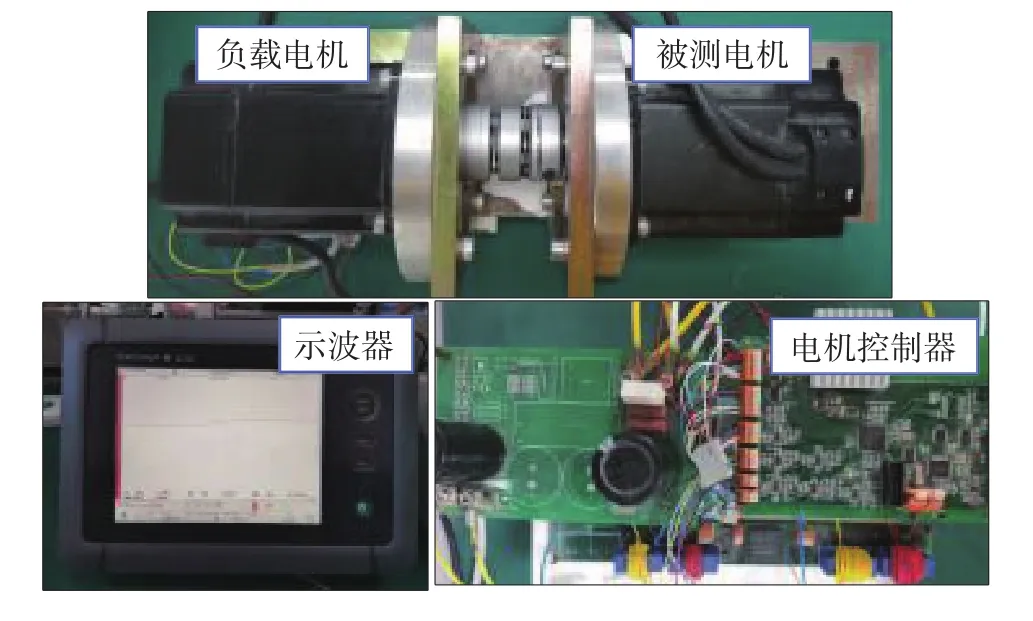
圖4 實驗平臺示意圖Fig.4 Diagram of experiment setup
同時,使用三個開關型霍爾傳感器獲取電機轉(zhuǎn)子位置并估計速度,但不參與矢量控制,僅用作與非線性觀測器法所得結(jié)果進行比對,利用DSP自帶的DAC(數(shù)-模轉(zhuǎn)換器)外設將實驗數(shù)據(jù)發(fā)送至示波器中。
3.2 實驗結(jié)果及分析
所使用的觀測器法無法較為穩(wěn)定地實現(xiàn)零低速區(qū)雙閉環(huán)控制,因此在實驗測試中使用了I/f啟動方法。首先,利用電流環(huán)與位置角給定令電機定位于電角度為0的位置;然后,通過電流環(huán)設置轉(zhuǎn)矩分量,通過位置角給定使電機逐步加速,當加速至一定轉(zhuǎn)速后,此時觀測器已經(jīng)較為穩(wěn)定,再切換至基于觀測器的雙閉環(huán)無位置傳感器控制模式。
圖5為電角速度分別為300rad/s與450rad/s時霍爾傳感器與無位置傳感器算法所得電機轉(zhuǎn)子位置估計值對比。由實驗結(jié)果可知,兩種方法所得位置估計值較為相近。因此,基于該非線性觀測器的方法能夠較為準確地獲取轉(zhuǎn)子位置信息。圖6為電角速度分別為300rad/s與450rad/s時兩種估計方式的速度估計偏差。由實驗結(jié)果可知,兩種方法所得速度估計值較為接近,且估計偏差在15rad/s內(nèi),說明該觀測器具有良好的速度跟蹤能力。綜上分析,由圖5、圖6的實驗結(jié)果,該非線性觀測器能夠較好地跟蹤電機轉(zhuǎn)子的位置與速度,并將估計結(jié)果用于矢量控制算法。


圖5 霍爾傳感器與觀測器法估計位置對比Fig.5 Comparison of positions estimated by Hall sensors and observer-based method

圖6 霍爾傳感器與觀測器法速度估計偏差Fig.6 Deviations of speed estimated by Hall sensors and observer-based method
為驗證該非線性觀測器的暫態(tài)響應能力,測試了速度指令由300rad/s階躍為450rad/s時的速度狀態(tài),圖7為速度響應波形測試結(jié)果。可以看出,電機速度能夠響應速度階躍指令,并在200ms內(nèi)由300rad/s上升到450rad/s,經(jīng)暫態(tài)過程后可繼續(xù)保持穩(wěn)定。因此,該觀測器具有一定的暫態(tài)響應能力,能有效應對轉(zhuǎn)速變化情況。
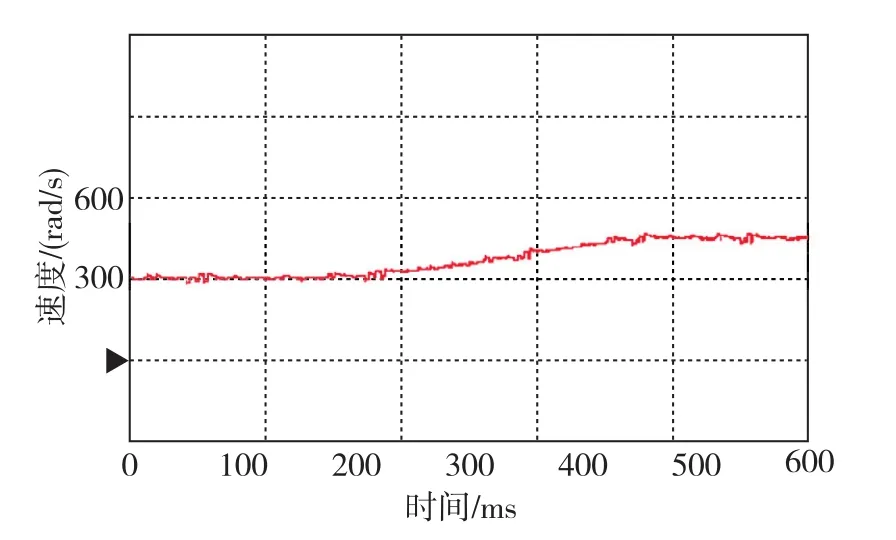
圖7 速度響應波形Fig.7 Waveform of speed response
4 結(jié)論
無位置傳感器控制由于取消了位置傳感器,使得系統(tǒng)結(jié)構(gòu)更加簡單,安裝更加方便,成本低、可靠性高、抗干擾能力強等優(yōu)點越來越受到重視,并得到迅速發(fā)展。本文對利用非線性觀測器法實現(xiàn)無位置控制技術進行了研究,基于德州儀器DSP產(chǎn)品TMS320F28075,使用了一種基于非線性觀測器的方法實現(xiàn)了永磁同步電機的無位置傳感器控制。與一般的全階觀測器相比,該非線性觀測器無需使用轉(zhuǎn)子速度信息,所以觀測器結(jié)構(gòu)簡單,且易于數(shù)字化實現(xiàn),轉(zhuǎn)子位置與速度信息可通過反正切及微分計算獲取。最后,使用750W電機實驗平臺驗證了無位置傳感器算法,實驗結(jié)果表明:該觀測器能夠較準確地估計出電機轉(zhuǎn)子的位置與速度,并用于閉環(huán)矢量控制結(jié)構(gòu)。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
兒童故事畫報(2019年5期)2019-05-26 14:26:14
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
