高分多模衛(wèi)星敏捷遙感技術(shù)研究及應(yīng)用
2021-07-03 02:30:38王躍范立佳李雨廷
航天器工程 2021年3期
王躍 范立佳 李雨廷
(中國空間技術(shù)研究院遙感衛(wèi)星總體部,北京 100094)
遙感衛(wèi)星具有觀測覆蓋范圍廣、不受國土、領(lǐng)海和領(lǐng)空限制等獨特優(yōu)勢,在國防和經(jīng)濟建設(shè)領(lǐng)域中發(fā)揮了重要作用。傳統(tǒng)的光學(xué)遙感衛(wèi)星分辨率較低,通過衛(wèi)星在滾動方向進行側(cè)擺來完成對沿跡條帶目標(biāo)的被動式推掃成像,可擴展成像范圍。近年來,隨著光學(xué)遙感相機的技術(shù)進步,光學(xué)遙感衛(wèi)星的分辨率不斷提升,分辨率的提升拓展了遙感應(yīng)用的廣度和深度[1]。分辨率持續(xù)提升,相機焦距不斷增加,成像幅寬進一步變窄。同時高分辨率衛(wèi)星的觀測需求也由長條帶大范圍推掃,轉(zhuǎn)向針對更多重點關(guān)注區(qū)域進行更高觀測效率、更多觀測角度、更復(fù)雜觀測方式的成像觀測,進而實現(xiàn)精細化觀測。高分辨率成像的工作模式也有了進一步拓展的需求,即利用衛(wèi)星的高敏捷姿態(tài)機動能力,快速指向成像區(qū)域,可一次過境實現(xiàn)對大量散布目標(biāo)的圖像數(shù)據(jù)高效獲取,或者控制衛(wèi)星光軸按特定方式進行推掃,實現(xiàn)拼幅成像、非沿跡推掃成像等工作模式,大幅度提升衛(wèi)星的任務(wù)執(zhí)行能力,充分發(fā)揮衛(wèi)星的使用效能。高分辨率與敏捷成像的結(jié)合,使得進一步提升行業(yè)用戶精細化數(shù)據(jù)快速獲取以及定量化高效應(yīng)用成為可能。
在世界范圍,艾科諾斯(Ikonos)、“快鳥”(QuickBird)、世界觀測-1/2(WorldView-1/2)、地球之眼-1(GeoEye-1)、昴宿星-1/2(Pleiades-1/2)等衛(wèi)星成為敏捷光學(xué)成像衛(wèi)星的代表。此類衛(wèi)星首先在成像工作模式上進行了擴展,除了常規(guī)的被動推掃成像外,增加了主動推掃成像方式,這樣可以獲得用戶定制的非沿跡條帶的目標(biāo)圖像[2-3];同時,姿態(tài)機動能力的提升,大幅縮短對不同目標(biāo)成像的切換時間,可以將一軌內(nèi)獲取目標(biāo)的數(shù)量提高至15~20個,并實現(xiàn)多條帶拼幅、多角度成像等成像模式。這種敏捷成像衛(wèi)星具有較強的機動能力,能夠提高對重點觀察區(qū)域的觀測效率,能夠為普查、詳查應(yīng)用提高成圖效率,并為應(yīng)急、災(zāi)害等應(yīng)用實現(xiàn)快速響應(yīng)。
中型敏捷遙感衛(wèi)星公用平臺(ZY2000 Remote Sensing Satellite Platform)在研制過程中完成了敏捷機動核心技術(shù)攻關(guān),明確了敏捷機動能力需求,構(gòu)建了高剛度小慣量的衛(wèi)星構(gòu)形、體系化設(shè)計了敏捷控制技術(shù)、系列化研制了涉及機動指標(biāo)的關(guān)鍵單機、全面分析了敏捷機動模式下成像質(zhì)量影響、面向好用易用開發(fā)了自主敏捷任務(wù)管理系統(tǒng)、并系統(tǒng)性完成了多層級的驗證。
作為中型敏捷遙感衛(wèi)星公用平臺的首發(fā)星,高分多模衛(wèi)星(GFDM-1)在充分繼承衛(wèi)星平臺敏捷機動技術(shù)的基礎(chǔ)上,結(jié)合用戶實際需求、載荷狀態(tài)以及任務(wù)特點,針對敏捷機動技術(shù)開展了適應(yīng)性分析、研制和在軌應(yīng)用。
1 敏捷機動工作模式及能力分析
1.1 面向應(yīng)用的敏捷成像模式
中型敏捷遙感衛(wèi)星公用平臺攻關(guān)過程中,重點從衛(wèi)星平臺角度針對敏捷機動能力進行了系統(tǒng)性設(shè)計和提升,高分多模衛(wèi)星研制階段,在對各行業(yè)用戶需求分析的基礎(chǔ)上,充分利用平臺的敏捷機動能力和大口徑高分辨率可見光相機敏捷成像能力,結(jié)合軌道特點,并參考國外同類衛(wèi)星的工作模式,設(shè)計了同軌多點目標(biāo)成像模式、同軌多條帶拼幅成像模式、同軌多角度成像模式、同軌立體成像模式、任意向主動推掃成像模式等多種面向應(yīng)用的敏捷成像模式[4]。
通過對國外敏捷衛(wèi)星工作模式的分析,結(jié)合成像任務(wù)應(yīng)用需求,高分多模衛(wèi)星設(shè)計了通過快速姿態(tài)機動調(diào)整相機指向的多種敏捷成像工作模式。
1)同軌多點目標(biāo)成像模式
衛(wèi)星通過快速姿態(tài)機動調(diào)整相機指向,實現(xiàn)對一軌可視范圍內(nèi)散布的多個點目標(biāo)的訪問成像,該模式旨在快速、高效獲取多個散布小塊目標(biāo)的圖像,一軌可獲取目標(biāo)數(shù)量不少于30個,較傳統(tǒng)成像衛(wèi)星效能提高6倍以上。
2)同軌多條帶拼幅成像模式
對區(qū)域目標(biāo)連續(xù)進行多次條帶拼接成像以達到完全覆蓋的目的。該模式旨在實現(xiàn)對某一較大面積區(qū)域的快速成像。一次拼幅可以完成典型成像區(qū)域包括60 km×60 km、60 km×120 km、90 km×90 km,滿足用戶對一次過境成像幅寬15~90 km的需求,基本能夠滿足對大型城市轄區(qū)的覆蓋。以90 km×90 km成像區(qū)域為例,對于20 km幅寬衛(wèi)星如果按照傳統(tǒng)成像方式,至少需要5個重訪周期(3天)以上才能夠?qū)崿F(xiàn)區(qū)域覆蓋,采用該模式后成像效能提高15倍以上。
3)同軌多角度成像模式
通過衛(wèi)星前視到后視過程多次成像,實現(xiàn)對點目標(biāo)或條帶目標(biāo)連續(xù)進行多個角度的成像。獲取某一特定目標(biāo)區(qū)域的多個不同角度的觀測圖像,同一目標(biāo)多角度成像最大次數(shù)可達12次,是我國遙感衛(wèi)星首次在軌實現(xiàn)此種成像模式。該模式可為用戶提供更為豐富的觀測信息,大幅度拓展了遙感應(yīng)用的領(lǐng)域。
4)同軌立體成像模式
通過前后視或前正后視的兩次或三次成像,實現(xiàn)單線陣兩視或三視立體成像,通過成像時間間隔調(diào)整立體成像基高比。該模式旨在實現(xiàn)單線陣兩視或三視立體圖像,是我國遙感衛(wèi)星首次通過敏捷成像能力獲取立體圖像,用戶可以指定立體交匯角,或指定對于每幅圖像的觀測角度。該模式觀測角度靈活,可根據(jù)用戶需求靈活設(shè)置,提高定量化應(yīng)用水平。
5)任意向主動推掃成像模式
衛(wèi)星采用主動推掃成像方式,通過“動中成像”,實現(xiàn)對某一非沿跡條帶目標(biāo)的掃描成像,是我國遙感衛(wèi)星首次在軌實現(xiàn)此種成像模式。該模式旨在快速獲取任意方向的條帶區(qū)域圖像,可以對河岸、海岸、邊境、公路、管道等不規(guī)則長條帶目標(biāo)進行成像,大幅提高衛(wèi)星圖像采集效率,較傳統(tǒng)遙感衛(wèi)星沿跡推掃成像獲取效率可提升數(shù)十倍。以對垂軌方向200 km跨度的不規(guī)則條帶目標(biāo)成像為例,對于20 km幅寬衛(wèi)星至少需要10個重訪周期(3天)以上才能夠?qū)崿F(xiàn)區(qū)域覆蓋,采用該模式可以利用一個弧段完成圖像獲取,圖像效能提高30倍以上。
高分多模衛(wèi)星的各種敏捷工作模式,實現(xiàn)了高分辨率成像與敏捷機動的有效結(jié)合,達到國際先進水平,提高了衛(wèi)星的快速觀測效率、單軌成像覆蓋范圍和立體觀測能力等,顯著地提升了衛(wèi)星的應(yīng)用效能,拓展了遙感商業(yè)價值。
1.2 敏捷機動能力分析
每種敏捷成像模式都可以分解成一個或若干個條帶成像任務(wù),每個條帶成像任務(wù)都包括成像過程和姿態(tài)切換過程兩個階段。
成像過程包括被動式和主動式推掃成像兩大類。被動式推掃成像過程中,星體滾動角、俯仰角相對軌道系保持固定;偏航角根據(jù)需求實時調(diào)整,使投影到相機焦面的地速方向與線陣法線平行;實現(xiàn)相機的推掃成像。主動式推掃成像過程根據(jù)實際應(yīng)用情況主要考慮勻地速主動推掃、勻角速度主動推掃和勻積分時間主動推掃,主動式推掃成像獲得的條帶,其方向可以與星下點軌跡平行(沿跡)、也可以不平行(非沿跡)。成像過程所涉及到的姿態(tài)規(guī)劃與姿態(tài)控制任務(wù)包括偏置飛行模式和一般軌跡跟蹤模式2類。其中前者用于被動式推掃成像,后者用于主動式推掃成像。
切換過程主要針對兩種成像過程及與正常飛行過程之間的多種切換過程,切換過程所涉及到的姿態(tài)規(guī)劃與姿態(tài)控制任務(wù)包括點對點機動模式和姿態(tài)/角速度預(yù)置模式2類。點對點機動模式起始時刻、結(jié)束時刻的衛(wèi)星滾動角速度、俯仰角速度為零,偏航角速度為零或較小。姿態(tài)/角速度預(yù)置模式過程起始時刻、結(jié)束時刻的衛(wèi)星滾動角速度、俯仰角速度、偏航角速度不一定為零。
機動能力分析是一項系統(tǒng)工程,需要衛(wèi)星總體以及控制、載荷、結(jié)構(gòu)等多個分系統(tǒng)密切配合,通過多輪迭代和仿真分析,給出了典型的衛(wèi)星機動能力需求:衛(wèi)星姿態(tài)機動并穩(wěn)定至0.002 (°)/s的典型時間為:5°/10 s、10°/15 s、25°/20 s、40°/25 s。角加速度不大于1.2 (°)/s2,角速度不大于4.5 (°)/s。
1.3 敏捷模式下成像質(zhì)量分析
高分辨率遙感衛(wèi)星的圖像質(zhì)量包括輻射質(zhì)量和幾何質(zhì)量兩類。輻射質(zhì)量參數(shù)主要有:動態(tài)傳函、信噪比、動態(tài)范圍等;幾何質(zhì)量主要有空間分辨率/幅寬、定位精度等[5]。敏捷衛(wèi)星敏捷機動能力強,必然會對成像質(zhì)量帶來一定影響,與常規(guī)衛(wèi)星的差異主要體現(xiàn)在敏捷衛(wèi)星大角度被動推掃成像模式和主動推掃成像模式[5]。
中型敏捷遙感衛(wèi)星公用平臺研制階段,針對成像質(zhì)量保證需求,建立了成像質(zhì)量保證指標(biāo)體系,其中提出了針對衛(wèi)星平臺敏捷機動的指標(biāo)要求,核心指標(biāo)包括:被動成像過程三軸姿態(tài)指向精度:優(yōu)于0.01°,姿態(tài)穩(wěn)定度優(yōu)于0.0005(°)/s;主動成像過程中姿態(tài)測量精度優(yōu)于0.02°,推掃角速度±2(°)/s以內(nèi),三軸指向精度優(yōu)于0.05°穩(wěn)定度優(yōu)于2×10-3(°)/s,并且對相關(guān)指標(biāo)進行了驗證。在此基礎(chǔ)上提出了針對敏捷模式下有效載荷的高速驅(qū)動以及積分時間分片設(shè)置快速插值等要求,同時也對地面處理的提出了相關(guān)要求。
高分多模衛(wèi)星研制階段,結(jié)合高分辨率相機鑒定件研制、整星試驗等工作,重點對成像質(zhì)量參數(shù)包括分辨率、幅寬、在軌動態(tài)傳遞函數(shù)、信噪比等指標(biāo)的實現(xiàn)情況進行迭代預(yù)估,完成了相關(guān)指標(biāo)的復(fù)核復(fù)算工作,確保在軌圖像的輻射和幾何質(zhì)量滿足要求。
2 敏捷機動技術(shù)實現(xiàn)途徑
敏捷技術(shù)涵蓋范圍很廣,以實現(xiàn)敏捷工作模式設(shè)計所提出的姿態(tài)機動控制能力為核心,外延可以擴展到整星設(shè)計的各個方面,包括星體及大型結(jié)構(gòu)(主要是太陽翼)的高剛度小慣量設(shè)計、成像質(zhì)量設(shè)計與分析、衛(wèi)星工作能力分析、任務(wù)規(guī)劃與自主任務(wù)管理、能源分析、測控能力分析以及熱平衡分析等多個方面[6]。本文主要瞄準(zhǔn)敏捷模式下高分辨率成像質(zhì)量要求,圍繞星體高剛度小慣量設(shè)計、姿態(tài)機動控制技術(shù)、敏捷衛(wèi)星任務(wù)規(guī)劃和管理、關(guān)鍵單機產(chǎn)品開發(fā)、敏捷成像質(zhì)量分析等方面介紹高分多模衛(wèi)星以及中型敏捷遙感衛(wèi)星公用平臺研制過程中敏捷機動技術(shù)的主要攻關(guān)工作。
2.1 敏捷任務(wù)規(guī)劃及管理技術(shù)
相比傳統(tǒng)遙感衛(wèi)星,敏捷遙感衛(wèi)星具有多種靈活的工作模式,其任務(wù)需求更加描述靈活、細致,任務(wù)的執(zhí)行時機選擇、排序、沖突解決等決策機制更加復(fù)雜,任務(wù)規(guī)劃技術(shù)要求更為復(fù)雜、精細。為了發(fā)揮敏捷遙感衛(wèi)星的多種工作模式下的最大效能,提出了適用于敏捷衛(wèi)星的任務(wù)系統(tǒng),主要包括地面任務(wù)規(guī)劃和星上任務(wù)管理兩部分[7-8]。
地面任務(wù)管理系統(tǒng)負責(zé)收集來自多源用戶的觀測任務(wù)需求,形成歸一化的條帶目標(biāo)描述,在考慮衛(wèi)星資源和能力的基礎(chǔ)上,對每個觀測任務(wù),合理安排軌道圈;對一軌內(nèi)的條帶序列進行時間規(guī)劃,形成一軌內(nèi)可執(zhí)行的初步“元任務(wù)序列”;根據(jù)地面站的可視范圍,添加數(shù)據(jù)傳輸元任務(wù);考慮衛(wèi)星資源能力對元任務(wù)序列可行性進行分析,對衛(wèi)星的能源、固存等變化情況進行仿真,并結(jié)合氣象條件等計算各個成像元任務(wù)的成像質(zhì)量;依據(jù)仿真分析結(jié)果,對初步元任務(wù)序列進行優(yōu)化調(diào)整;最終形成一軌內(nèi)的“元任務(wù)序列”,通過測控網(wǎng)將元任務(wù)序列上傳至衛(wèi)星。
星上任務(wù)管理系統(tǒng)收到地面上注的元任務(wù)序列后,進行合法性檢查,對于不合法的元任務(wù)進行處理并向地面反饋;在任務(wù)圈開始前對當(dāng)圈每個元任務(wù)進行解析,生成任務(wù)過程和切換過程的姿態(tài)機動路徑表,完成姿態(tài)規(guī)劃,并進行姿態(tài)機動約束檢查,生成將姿態(tài)機動和天線控制子任務(wù)發(fā)送給控制系統(tǒng),將帶有時標(biāo)的有效載荷的操作序列發(fā)送給有效載荷,自動實現(xiàn)多種成像和回放任務(wù)的執(zhí)行。
地面可根據(jù)需要插入、修改或刪除已經(jīng)上注的元任務(wù),同時也可以緊急停止正在執(zhí)行的元任務(wù),并按照新的任務(wù)序列重新進行規(guī)劃,滿足用戶靈活使用要求。這種地面任務(wù)規(guī)劃+星上任務(wù)管理的技術(shù),地面部分完成任務(wù)的合理規(guī)劃確保實現(xiàn)最大能力的任務(wù)排布,星地接口采用元任務(wù)描述,在易于對衛(wèi)星操控的基礎(chǔ)上大幅減小了星地數(shù)據(jù)上注的數(shù)據(jù)量,星上部分完成高密度的任務(wù)指令管理,充分挖掘并拓展了敏捷衛(wèi)星的任務(wù)執(zhí)行能力[9]。
2.2 高剛度小慣量星體結(jié)構(gòu)設(shè)計
綜合考慮衛(wèi)星高分辨率成像、敏捷性對小慣量要求、結(jié)構(gòu)穩(wěn)定性要求、運載約束等,高分多模衛(wèi)星構(gòu)形充分繼承中型敏捷平臺模塊化設(shè)計,衛(wèi)星包括平臺+太陽翼+載荷。平臺采用兩艙設(shè)計,上艙為設(shè)備艙,下艙為服務(wù)艙,主載荷位于設(shè)備艙頂部,衛(wèi)星采取縱軸對地飛行姿態(tài)。
平臺結(jié)構(gòu)采用“框梁+箱板”的結(jié)構(gòu)形式。傳力形式簡單,易于實現(xiàn)結(jié)構(gòu)高剛度設(shè)計。電子學(xué)設(shè)備采取“外掛”布局設(shè)計,布局緊湊。考慮敏捷機動姿態(tài)變化,雙導(dǎo)航天線布局采取偏置一定角度對稱布局。
為保證相機光軸與星敏感器光軸間夾角的穩(wěn)定性,采用相機與星敏感器一體化設(shè)計,并在相機與平臺連接處設(shè)計有相機柔性適配裝置,抑制平臺在軌熱變形對相機主體的影響[10]。
圖1所示為高分多模衛(wèi)星飛行狀態(tài)構(gòu)形示意圖,衛(wèi)星配置二維二次可展開太陽翼,布局于衛(wèi)星平臺±Y側(cè)。

圖1 衛(wèi)星飛行狀態(tài)構(gòu)形圖Fig.1 Flying configuration of agile remote sensing satellite
此構(gòu)形保證了太陽板面積,同時合理布局了太陽翼與衛(wèi)星距離關(guān)系。太陽翼單板采用加厚鋁蜂窩夾芯高剛度設(shè)計,板間采用高剛度鉸鏈連接,整翼通過高剛度根鉸與驅(qū)動機構(gòu)對接。采取上述措施,大幅提高了整星的剛度,降低了慣量。高分多模衛(wèi)星質(zhì)量2400 kg,最大慣量軸慣量優(yōu)于3900 kg·m2,為實現(xiàn)衛(wèi)星敏捷機動奠定了基礎(chǔ)。
2.3 控制方案設(shè)計
衛(wèi)星姿態(tài)控制算法主要包括姿態(tài)確定、目標(biāo)姿態(tài)計算、姿態(tài)控制3個部分,其中姿態(tài)控制包括姿態(tài)控制律、控制力矩陀螺(CMG)操縱律和基于磁力矩器或噴氣系統(tǒng)的角動量管理[11]。
1)姿態(tài)確定方案
控制系統(tǒng)的定姿算法主要是由星敏感器和陀螺組合進行高精度的姿態(tài)確定,利用陀螺、紅外地球敏感器、太陽敏感器進行姿態(tài)確定作為備份。在點對點姿態(tài)機動過程中,用陀螺作為姿態(tài)測量的部件,靠陀螺輸出積分得到姿態(tài)信息。在機動開始前,對陀螺漂移進行修正。對姿態(tài)/姿態(tài)角速度預(yù)置以及一般軌跡跟蹤等模式,在采用陀螺積分估計衛(wèi)星姿態(tài)信息的同時,也引入星敏測量信息進行姿態(tài)修正。
2)目標(biāo)姿態(tài)確定算法
在點對點姿態(tài)機動中,主要采用軌跡規(guī)劃的方法確定衛(wèi)星的目標(biāo)姿態(tài)。根據(jù)陀螺量程和執(zhí)行機構(gòu)力矩能力采用基于角加速度正弦曲線軌跡,使得星體姿態(tài)以最短路徑繞歐拉軸旋轉(zhuǎn);引入計算得到偏流角和偏流角速度,進而確定衛(wèi)星的目標(biāo)姿態(tài)角和姿態(tài)角速度;為了提高動態(tài)響應(yīng)性能,根據(jù)規(guī)劃的標(biāo)稱軌跡對星體施加了前饋補償力矩。
姿態(tài)/姿態(tài)角速度預(yù)置模式主要用于非沿跡跟蹤的起始姿態(tài)建立和跟蹤完返回正常姿態(tài)過程。在預(yù)置模式中,星上采用基于末端平滑的多項式軌跡規(guī)劃方法,主要用于保證機動后期姿態(tài)/姿態(tài)角速度的平穩(wěn)緩變特性,保證機動到位后時的控制精度。
非沿跡軌跡設(shè)為一條與衛(wèi)星飛行方向不平行的直線,衛(wèi)星首先根據(jù)指令要求的機動條帶經(jīng)緯度,機動時間要求計算出當(dāng)前地面點坐標(biāo),根據(jù)衛(wèi)星當(dāng)前位置和地面點的位置的幾何關(guān)系計算出從衛(wèi)星指向地面的單位矢量,并根據(jù)矢量關(guān)系最終轉(zhuǎn)換為衛(wèi)星每個控制周期的目標(biāo)姿態(tài)。
3)姿態(tài)控制方案
主要采用經(jīng)典比例-積分-微分(PID)控制器進行控制,同時引入結(jié)構(gòu)濾波器抑制撓性振動,實現(xiàn)姿態(tài)角速度控制指標(biāo)。由于采用了大力矩的控制力矩陀螺作為執(zhí)行機構(gòu),考慮到控制力矩陀螺的力矩精度以及力矩噪聲等因素,提高系統(tǒng)帶寬到0.1 Hz,在提高系統(tǒng)響應(yīng)速度的同時盡量抑制執(zhí)行機構(gòu)力矩噪聲對系統(tǒng)控制精度影響。控制器所計算的控制力矩轉(zhuǎn)化為CMG低速框架的運動角速度,在進行框架角速度指令的精確解算基礎(chǔ)上,進行奇異規(guī)避[12]。
4)姿態(tài)機動仿真
根據(jù)敏捷機動方案,分別針對點對點機動、非沿跡機動、被動及主動機動等不同工況進行了全數(shù)學(xué)仿真和氣浮臺半物理仿真。全數(shù)字仿真重點針對不同質(zhì)量特性、太陽翼結(jié)構(gòu)頻率、控制帶寬等影響因素,利用地面動力學(xué)模型建立閉環(huán)控制環(huán)境。半物理氣浮臺仿真,主要是利用真實CMG、陀螺以及控制器等產(chǎn)品,構(gòu)成真實的姿態(tài)機動環(huán)境,進行閉環(huán)仿真,圖2所示為半物理氣浮臺仿真實驗場景。

圖2 半物理氣浮臺仿真實驗Fig.2 Experiment of semi-physical air bearing table simulation
仿真結(jié)果表明三軸氣浮臺試驗結(jié)果與對應(yīng)的數(shù)學(xué)仿真分析結(jié)果一致性好,實現(xiàn)了控制所有指標(biāo)的閉環(huán)驗證,各項指標(biāo)均滿足工作模式能力所提出的要求,可以確保整星實現(xiàn)各種敏捷成像模式。
2.4 關(guān)鍵單機研制
涉及敏捷機動技術(shù)的關(guān)鍵單機主要包括高剛度太陽翼、大量程三浮陀螺組件、125 Nms控制力矩陀螺等產(chǎn)品,在中型敏捷遙感衛(wèi)星公用平臺研制過程中,完成了上述關(guān)鍵單機產(chǎn)品的指標(biāo)要求確定、產(chǎn)品設(shè)計、生產(chǎn)、鑒定、定型等工作,為敏捷機動技術(shù)的實現(xiàn)奠定了基礎(chǔ)。
2.4.1 高剛度太陽翼
高分多模衛(wèi)星繼承中型敏捷衛(wèi)星平臺,采用并聯(lián)二次展開式高剛度太陽翼,太陽翼由根部鉸鏈、一塊中心板、兩塊側(cè)板組成,中心板與兩塊側(cè)板外形尺寸相同,均為1200 mm×2200 mm,收攏狀態(tài)通過4個壓緊點壓緊在衛(wèi)星側(cè)壁上。太陽翼根部鉸鏈與中心板直接相連,兩塊側(cè)板分別通過兩個鉸鏈與中心板長邊相連,形成根部鉸鏈與中心板串聯(lián),中心板與兩側(cè)板并聯(lián)的構(gòu)形。太陽翼展開狀態(tài)下剛度大于2.5 Hz。
研制過程中完成了高剛度太陽翼的設(shè)計、生產(chǎn),單機狀態(tài)下開展了剛度測試、靜力試驗、驅(qū)動性能、基頻測試、噪聲試驗和熱真空試驗等[13],整星狀態(tài)下完成了部裝及展開試驗、整星力、熱試驗。試驗結(jié)果表明,太陽翼產(chǎn)品所有性能指標(biāo)均滿足設(shè)計要求,符合敏捷機動任務(wù)要求。圖3所示為高剛度太陽翼地面展開試驗場景。

圖3 高剛度太陽翼Fig.3 High rigidity solar wing
2.4.2 大量程三浮陀螺組件
作為敏捷機動衛(wèi)星重要的姿態(tài)敏感器,既要考慮敏捷機動時大角速度測量范圍要求,又要針對定姿精度、指向精度等指標(biāo)考慮高測量精度要求。在三浮陀螺產(chǎn)品基礎(chǔ)上,通過擴大量程的技術(shù)路徑,研發(fā)了大量程三浮陀螺,圖4所示為大量程三浮陀螺組件。其測量范圍:-6~+6(°)/s,隨機漂移不低于0.006(°)/h(3σ),滿足敏捷衛(wèi)星姿態(tài)機動和穩(wěn)定度的需求。

圖4 大量程三浮陀螺組件Fig.4 Wide range gyro
完成了大量程三浮陀螺組件原理樣機、電性產(chǎn)品的研制和性能試驗,以及陀螺定標(biāo)專項試驗;研制了鑒定件并完成了鑒定試驗考核;投產(chǎn)了壽命件開展了壽命專項試驗。各項功能性能指標(biāo)得到了充分驗證,可用于高精高穩(wěn)且高機動性的敏捷型遙感衛(wèi)星平臺。
2.4.3 125 Nms控制力矩陀螺
根據(jù)衛(wèi)星機動過程中的最大角加速度1.2(°)/s2,最大角速度4.5(°)/s的要求,采用控制力矩陀螺作為分系統(tǒng)執(zhí)行機構(gòu)配置方案[14]。按照敏捷衛(wèi)星質(zhì)量特性預(yù)計,控制分系統(tǒng)需要選用角動量不小于107 Nms、輸出力矩不小于104 Nm的控制力矩陀螺產(chǎn)品,新研制125 Nms/125 Nm規(guī)格的控制力矩陀螺產(chǎn)品,圖5所示為CMG主體。

圖5 125 Nms控制力矩陀螺Fig.5 125Nms CMG
125 Nms控制力矩陀螺完成了原理樣機、電性產(chǎn)品的研制和性能試驗;研制了鑒定件并完成了鑒定試驗考核,設(shè)計指標(biāo)得到了充分驗證。突破了長壽命高速轉(zhuǎn)子組件技術(shù)和高精度高帶寬框架控制技術(shù)在內(nèi)的關(guān)鍵技術(shù)。完成了包括高速轉(zhuǎn)子軸承運轉(zhuǎn)穩(wěn)定性試驗、大機動條件下高速轉(zhuǎn)子性能試驗、整機熱平衡試驗、整機壽命試驗等在內(nèi)的驗證試驗。
結(jié)合衛(wèi)星機動能力需求以及衛(wèi)星構(gòu)形及總裝布局約束,選擇5個CMG按照五面錐構(gòu)型組成一體化的CMG模塊。同時,為了有效降低CMG高頻震顫對有效載荷成像質(zhì)量的影響,在CMG支架與服務(wù)艙四立柱之間通過機械隔振裝置連接,實現(xiàn)CMG模塊整體隔振,有效提高微振動抑制效率,詳見圖6所示。

圖6 采用整體隔振技術(shù)的CMG模塊Fig.6 Vibration isolation device in CMG module
3 在軌驗證
高分多模衛(wèi)星于2020年7月3日發(fā)射入軌,在軌期間,通過地面規(guī)劃上注元任務(wù)并結(jié)合星上自主任務(wù)管理的方式,驗證了全部敏捷機動工作模式,包括同軌多點目標(biāo)、同軌拼幅、同軌多角度(立體)、非沿跡主動推掃等多種成像模式,以及應(yīng)急快速重訪觀測任務(wù),任務(wù)均成功執(zhí)行,姿態(tài)機動能力和穩(wěn)定度指標(biāo)滿足要求,在敏捷工作模式下獲取了全色優(yōu)于0.5 m分辨率的高分辨率圖像,圖像清晰,成像能力和圖像質(zhì)量均達到或超過了國外同類衛(wèi)星的水平,獲得各方用戶的一致認可。
1)同軌多點目標(biāo)成像
2020年9月3日16:02—16:27,高分多模衛(wèi)星完成了單軌20個點目標(biāo)成像任務(wù),從北半球俄羅斯的瑟克特夫卡爾開始,對喀山、庫塔伊西、安曼、喀土穆、恩多拉和馬塞盧等地理位置從北緯61°40′到南緯29°20′范圍內(nèi),覆蓋歐洲、亞洲和非洲的20個城市完成了點目標(biāo)成像,衛(wèi)星滾動姿態(tài)在-26°~+23°之間進行頻繁機動,姿態(tài)角度與地面規(guī)劃一致,機動過程中姿態(tài)曲線見圖7所示,所有20個目標(biāo)融合圖像清晰、色彩豐富、層次分明,圖8展示的是其中馬塞盧融合后的局部圖像。

圖8 同軌多點目標(biāo)成像模式衛(wèi)星影像(馬塞盧)Fig.8 Satellite image of multi-point targets imaging mode(Maseru)
2)同軌拼幅成像
2020年9月3日,高分多模衛(wèi)星完成了一軌內(nèi)對北京城區(qū)的拼幅高分辨率成像,通過4次拼幅對北京六環(huán)范圍進行了覆蓋,獲取了較大范圍的高質(zhì)量遙感數(shù)據(jù)。圖9所示為4次條帶拼幅成像任務(wù)圖及所獲取的北京首都國際機場高分辨率遙感影像。
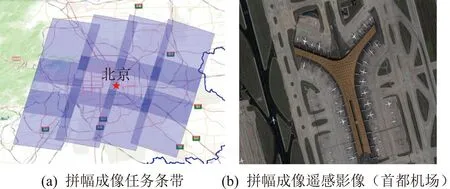
圖9 拼幅成像任務(wù)及遙感影像Fig.9 Satellite image and task planning of wide piecing imaging mode
3)單軌多角度(立體)成像:
2020年12月23日,高分多模衛(wèi)星完成了對日本東京地區(qū)的一次單軌多角度成像,獲取了東京關(guān)東地區(qū)連續(xù)13個角度同一位置的圖像,多角度成像過程中,衛(wèi)星俯仰角從-45°~+42°進行了連續(xù)機動。圖10展示了任務(wù)條帶圖以及13個角度中3個角度的圖像,圖像信息豐富且具有較高分辨率,圖中東京晴空塔塔身側(cè)面的紋理細節(jié)清晰可見。

圖10 同軌多角度成像任務(wù)及部分多角度影像(東京晴空塔)Fig.10 Satellite image and task planning of multi perspective imaging mode(Tokyo Sky Tree)
2020年9月24日,高分多模衛(wèi)星對南美洲智利銅礦礦區(qū)完成了一次同軌三視立體成像任務(wù),起始立體觀測角度23.02°,二視觀測角度接近0°,末次觀測角度-23.23°,圖11所示為利用三視圖像數(shù)據(jù)處理得到的智利銅礦礦區(qū)三維立體影像。
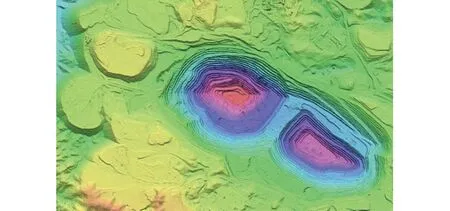
圖11 智利銅礦三維立體影像Fig.11 Satellite stereo image (Copper mine area of Chile)
4)非沿跡主動成像
高分多模衛(wèi)星首次在軌實現(xiàn)了非沿跡主動成像,在軌期間進行了多次非沿跡主動成像任務(wù),其中2020年7月7日17:42對意大利第勒尼安海海岸帶進行了一次長度約250 km的非沿跡主動成像,覆蓋了羅馬、那不勒斯、薩勒諾等城市海岸帶區(qū)域,圖像質(zhì)量清晰,圖12為非沿跡任務(wù)軌跡及所獲取的羅馬地區(qū)圖像。
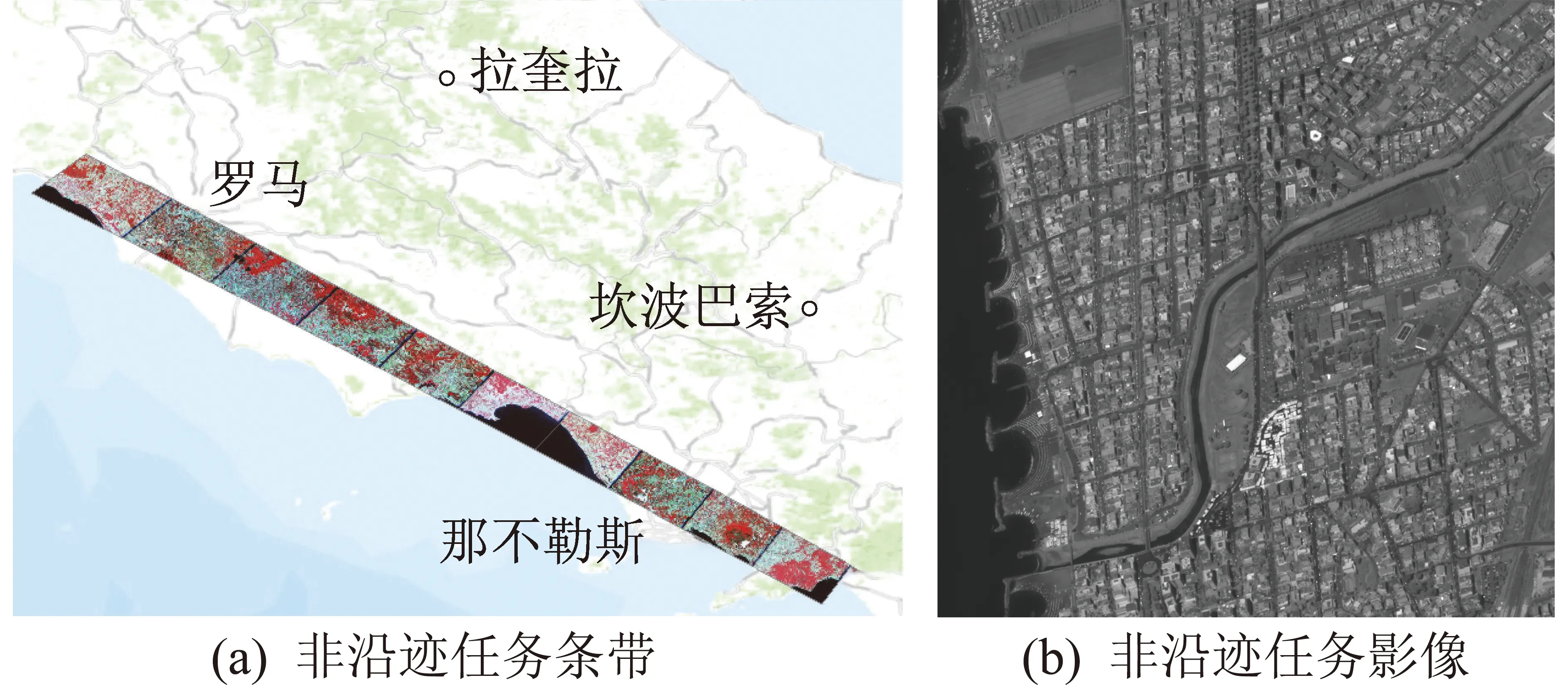
圖12 非沿跡任務(wù)及圖像Fig.12 Satellite image and task planning of the active scanning mode
5)快速重訪成像
高分多模衛(wèi)星利用其敏捷機動能力可以實現(xiàn)熱點地區(qū)的快速重訪,2020年8月4日,黎巴嫩首都貝魯特港口區(qū)發(fā)生巨大爆炸,受損嚴(yán)重。衛(wèi)星于8月5日緊急對發(fā)生爆炸的港口區(qū)進行了成像,并且于8月6日再次通過大角度機動,對同一區(qū)域進行了24小時內(nèi)的二次重訪成像,展示了衛(wèi)星的高敏捷機動特性和快速重訪能力。圖13所示分別為8月5日和8月6日獲取的貝魯特港遙感圖像,圖像清晰,可用于損失評估和災(zāi)后重建。高分多模衛(wèi)星的這種敏捷成像能力,對于重點地區(qū)的高時間分辨率觀測可以發(fā)揮巨大作用。
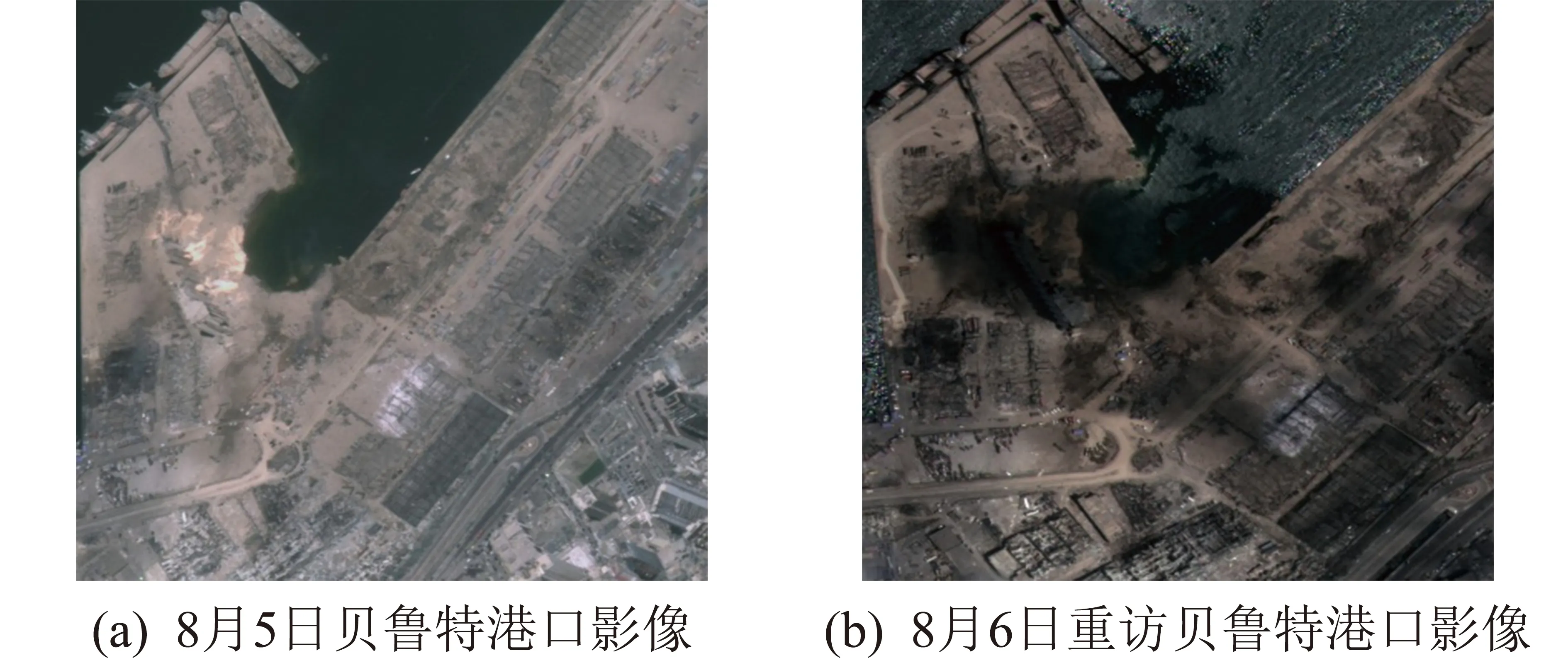
圖13 黎巴嫩貝魯特港口重訪遙感圖像Fig.13 Satellite revisit images of Beirut port
4 結(jié)束語
高分多模衛(wèi)星基于中型敏捷遙感衛(wèi)星公用平臺研制成果,實現(xiàn)了敏捷機動技術(shù)的在軌驗證,在國內(nèi)首次實現(xiàn)了同軌多角度成像和立體成像、非沿跡主動成像等敏捷成像模式。
作為高分辨率光學(xué)觀測星座中當(dāng)前分辨率最高且具有多種觀測模式的衛(wèi)星,通過敏捷機動技術(shù)與高分辨率遙感技術(shù)的結(jié)合,高分多模衛(wèi)星突破了傳統(tǒng)被動沿跡推掃高分辨率成像幅寬限制,拓展了遙感工作模式,大幅提升了高分辨率衛(wèi)星的觀測能力,提高了陸地觀測系統(tǒng)的定量化應(yīng)用水平,實現(xiàn)了我國遙感衛(wèi)星技術(shù)水平的跨越式發(fā)展。隨著高分多模業(yè)務(wù)星的發(fā)射入軌,將進一步提升遙感數(shù)據(jù)的獲取效率和能力。
未來遙感衛(wèi)星也可在高分多模衛(wèi)星敏捷機動技術(shù)的基礎(chǔ)上,進一步拓展新型工作模式、采用高性能被動主動相結(jié)合的全頻段穩(wěn)定平臺、運用人工智能算法等手段,并結(jié)合光學(xué)、微波等不同載荷的特點,不斷提升敏捷遙感衛(wèi)星的功能性能指標(biāo)和智能化水平,推動我國空間遙感事業(yè)不斷升級。