高分多模衛星微振動抑制設計與驗證
2021-07-03 02:31:56高行素王光遠管帥楊文濤張國斌范立佳趙煜羅文波
航天器工程 2021年3期
高行素 王光遠 管帥 楊文濤 張國斌 范立佳 趙煜 羅文波
(1 中國空間技術研究院遙感衛星總體部,北京 100094) (2 北京空間飛行器總體設計部,北京 100094)
高分多模衛星(GFDM-1)是在中型敏捷遙感衛星公用平臺(ZY2000 Remote Sensing Satellite Platform)基礎上研制的光學遙感衛星,具有分辨率高、機動性強、成像模式多等特點。為實現敏捷機動功能,高分多模衛星配置了5臺大力矩控制力矩陀螺(Control Moment Gyroscope ,CMG)。衛星在軌運行期間,CMG和太陽翼驅動機構(Solar Array Drive Assembly,SADA)、天線驅動機構等運動部件會引起微振動,光學相機成像質量對微振動非常敏感[1-3]。為了滿足衛星任務需求,必須對星上微振動進行抑制。
針對衛星微振動抑制需求,國內外都開展過大量研究與衛星應用。目前國外先進遙感衛星平臺基本都應用了隔振技術,用于改善有效載荷工作環境。以世界觀測(Worldview)系列高分辨率觀察衛星為代表的美國高分辨率遙感衛星平臺,應用了Honeywell公司的微振動隔離系統(Micro Vibration Isolation System,MVIS)隔振系統,用于提高對地觀測系統的成像精度。NASA的蘭利研究中心、戈達德航天中心的載荷隔離等微振動抑制技術,已成功應用于相關衛星,并取得了較好的減振效果。我國的高分七號衛星,采用CMG隔振裝置對微振動進行抑制,有效保障了亞米級分辨率的實現[4]。以上各項微振動抑制研究與應用,均對敏捷型遙感衛星的微振動抑制設計與驗證有一定借鑒意義。
本文針對高分多模衛星微振動抑制需求,提出了“CMG群整體隔振+有效載荷隔振”兩級隔振的微振動抑制方案,重點開展了擾動源、星體結構、敏感載荷等關鍵環節的微振動抑制設計與驗證,并通過在軌微振動對微振動抑制方案進行了在軌驗證。
1 微振動抑制技術路線
高分多模衛星微振動抑制技術路線如圖1所示。

圖1 微振動抑制技術路線Fig.1 Micro-vibration attenuation technology roadmap
基于衛星平臺和典型光學載荷微振動抑制需求,提出“CMG群整體隔振+有效載荷隔振”兩級隔振的微振動抑制方案;分解得到了微振動傳遞全鏈路各環節的微振動指標;系統梳理了平臺各類活動部件的擾動特性,通過CMG擾動測試獲取了CMG擾動特性;完成了并聯隔振裝置設計和并聯隔振裝置微振動試驗,驗證了其隔振性能;開展了系統級微振動試驗,對衛星微振動抑制能力進行了系統級的評估與驗證;建立了系統級微振動分析模型,開展了在軌微振動響應及成像質量預示。
2 微振動抑制總體方案
2.1 敏感載荷需求分析
對于光學相機,微振動傳遞至相機結構后,引起相機的動力學響應,其響應的形態和幅度,與自身的力學特性直接相關[5]。通過動力學響應分析或試驗,可獲得特定頻率下相機的響應模式,進而得到該模式下各光學元件的相對運動[6]。在給定激勵頻率和激勵幅值后,即可得到各光學元件相對運動的完整規律。光學元件的相對運動所引起的像移分析,相對于相機整體運動而言,更為復雜。這與相機的光學系統設計直接相關。對于復雜光學系統,像移量對不同鏡面的運動量敏感度有較大差異。因此,在通過力學分析或試驗獲得各光學元件的運動規律后,還須將其代入光學模型分析光路的變化情況,進而確定像移量,定量分析成像質量的退化程度。在對微振動抑制設計進行分析或試驗驗證時,需要通過光機耦合分析才能最終定量確定成像質量受影響的程度[7-9]。
一般根據光學系統焦距、地面像元分辨率、像元尺寸、積分時間等主要參數,對微振動抑制需求進行分析,主要集中在以下三個方面。
(1)微振動造成光學相機的絕對運動造成的視軸指向(Line of Sight,LOS)晃動;
(2)微振動造成光學相機內部光學器件相對運動照成的LOS晃動;
(3)微振動造成的圖像畸變。
其中第(1)項相機整體運動引起的LOS晃動造成的像移,可由相機的基本參數直接計算得到。而對于后兩項相機內部各光學元件間相對運動引起的像移,則需要開展相機結構特性、光學系統特性的耦合分析。
經分析高分多模衛星有效載荷對微振動抑制的指標要求如下:①當采取微振動抑制措施時,相較于不采取微振動抑制措施時,傳遞至有效載荷安裝界面的微振動響應衰減80%以上;②在成像積分時間內,微振動引起的相機視軸指向抖動不超過0.1像元。
2.2 微振動傳遞路徑
微振動抑制設計是通過對傳遞路徑的調整和適配,使擾動能量耗散或重新分配,從而降低由擾動源激勵產生的有效載荷振動響應幅值[10]。衛星的運動或變形導致的像移主要包括兩種模式,衛星的姿態擾動,導致星體的低頻晃動,從而使相機的指向發生變化,形成像移。星上活動部件的運動形成擾動力,導致衛星結構振動,從而引起相機的整體抖動,導致光軸指向變化,或相機內部光學元件局部抖動導致光路變化,都會引起像移。航天器姿態變化帶來的視軸指向晃動,可利用控制系統的姿態穩定度指標對其約束。由此得到衛星微振動對成像質量影響鏈路如圖2所示。
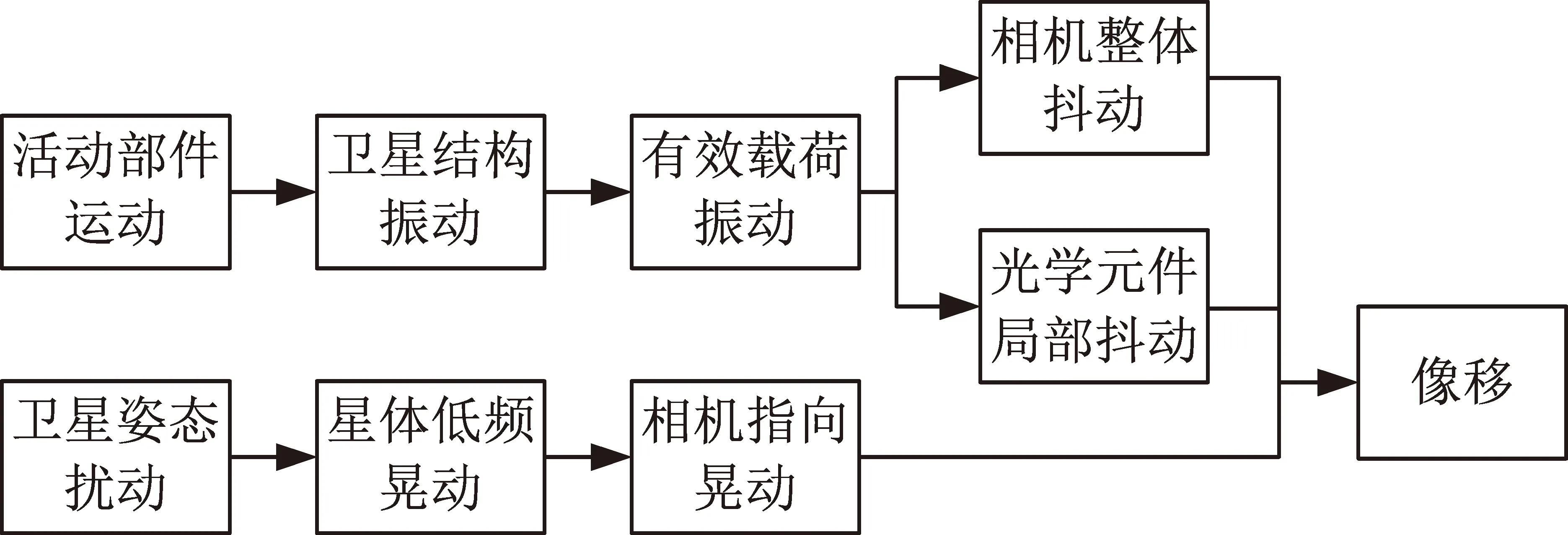
圖2 衛星微振動對成像質量影響鏈路Fig.2 Satellite impact link of micro-vibration to imaging quality
根據高分多模衛星構形布局和結構形式,重點考慮CMG擾動,微動傳遞鏈路如圖3所示。

圖3 高分多模衛星微振動對成像質量影響鏈路Fig.3 GFDM-1 satellite impact link of micro-vibration to imaging quality
微振動對成像質量影響鏈路,主要包括擾動源、傳遞路徑、有效載荷3個方面的因素。其中,傳遞路徑又包括CMG隔振裝置、主結構和相機隔振裝置3個部分。根據高分多模衛星的微振動抑制任務需求和構形布局特點,同時采取CMG隔振裝置和相機隔振裝置降低傳遞至相機的微振動幅值,CMG隔振裝置、星體結構、相機隔振裝置共同構成二級柔性浮筏式減振系統。
2.3 擾動源特性研究
衛星在軌微振動主要是由于活動部件運動引起的,主要包括CMG、SADA、數傳天線驅動機構、中繼天線驅動機構和三浮陀螺等。根據在軌測量數據,CMG是擾動能量最高的設備。數傳天線雙軸驅動機構、SADA、三浮陀螺、太陽翼等活動部件引起的擾動,相對CMG引起的擾動均為小量,影響可忽略,因此衛星微振動抑制重點考慮CMG引起的擾動。
CMG擾動特性一般通過六分量測力平臺進行測量,測試狀態如圖4所示。六分量測量平臺可實現對空間正交的三個力和三個力矩的動態測量,具有結構剛度高、測量靈敏度高、標定精度高、可實現低頻/超低頻微振動測量等優點,可實現動量輪、CMG、制冷機等多種活動部件擾動特性的測量。

圖4 CMG單機擾動特性測試Fig.4 Disturbance characteristic test of CMG
125 Nms CMG的典型頻譜如圖5所示,其中Fx、Mx分別為垂直CMG安裝面方向的力和力矩。CMG在穩速、機動狀態下,各臺CMG的擾振力、力矩頻譜圖呈現出一致性特征,均在0.4倍頻、基頻和二倍頻出現峰值,其中基頻峰值最大,二倍頻峰值次之,0.4倍頻峰值較小。

圖5 125 Nms CMG典型頻譜圖Fig.5 Typical spectrogram of 125Nms CMG
2.4 微振動抑制設計
1)擾動源隔振
為適應小慣量布局要求,CMG群統一安裝在CMG支架上,采用“并聯隔振裝置”整體隔振。CMG模塊在整星中的位置如圖6所示。8根含微動隔振器的隔振桿組成桁架結構,對CMG和CMG支架提供支撐功能,同時,隔振器的阻尼輸出能夠起到降低CMG共振峰值響應的作用。在軌工作時,由CMG傳出的6個自由度微振動,被分解為8根隔振桿的軸向微振動載荷,通過隔振桿內微動隔振器的阻尼和剛度作用,對微振動進行衰減和隔離。

圖6 CMG模塊在整星中的位置Fig.6 Position of CMG module in whole satellite
這種整體隔振可以使平臺設計質量、空間代價最小,提高隔振系統使用效能和隔振效果;有利于保證CMG群連接剛度和連接強度,保證CMG模塊安裝剛度和整星剛度,保證活動部件高速運轉時的方位和指向要求;可以通過桿系設計,保證對CMG群的6自由度有效隔振,同時與整星結構一體化設計,可有效防止引入隔振裝置對整星結構頻率造成不利影響。
微動隔振器(如圖7所示)是并聯隔振裝置中的核心單機,通過在隔振彈簧內部并聯流體阻尼器,實現系統剛度匹配和阻尼輸出功能。這種隔振器具有很高的阻尼系數,由于是通過自身的彈性變形來驅動流體運動,因此能夠在很小的變形位移行程上實現阻尼效果。

圖7 微振動隔振器Fig.7 Micro-vibration isolators
為驗證并聯隔振裝置的減隔振特性,開展了并聯隔振裝置微振動試驗,如圖8所示。試驗件安裝在地面工裝上,分別測試CMG工作時隔振桿和剛性桿兩種狀態下CMG模塊的輸出特性。測試結果表明,并聯隔振裝置能夠將CMG群輸出的微振動干擾力衰減80%以上。

圖8 并聯隔振裝置微振動試驗Fig.8 Micro-vibration test of parallel isolators
2)星體結構減振
由擾源產生擾動,至有效載荷形成微振動響應,其間擾動能量經星體結構進行傳遞。傳遞特性受到衛星各環節力學特性的影響,表現出極為復雜的規律,隔振裝置必須與衛星結構進行合理的匹配性設計,才能夠實現較好的性能指標。擾動源經結構傳遞后至有效載荷的微振動響應是評價減振能力的依據,因此結構傳遞是決定能否滿足微振動抑制能力需求的必要環節。
星體結構微振動抑制能力的設計手段目前較為有限,主要是對主傳力路徑和關鍵局部結構進行合理的頻率分配,避免結構引起共振放大。影響動力學傳遞特性的三個主要參數為剛度、質量、阻尼。降低結構傳遞本質上是對結構傳遞路徑中的剛度、質量和阻尼進行調節,主要通過剛度匹配改變傳遞率的頻率特性,通過阻尼匹配改變傳遞率的幅值特性,通過質量匹配改變傳遞率的能量分配。星體結構減振設計重點針對四個方面:擾動源部件局部支撐結構頻率設計、隔振裝置局部連接結構剛度設計、有效載荷連接結構頻率設計、衛星本體自由邊界低階模態設計。
CMG支架為星體結構傳遞中的重要環節,為避免結構引起共振放大,通過并聯隔振裝置力學試驗,驗證了CMG支架在擾動源特征頻點附近不存在局部模態,能夠保證良好的減振性能。
3)敏感載荷隔振
對于有效載荷隔振,在相機與星體結構之間加入相機柔性適配裝置,使相機懸浮安裝,在起到隔振作用的同時,還可釋放相機與星體結構之間熱變形不協調形成的熱應力,改善載荷視軸與姿態敏感軸之間的夾角穩定度。
高分多模衛星兼顧熱穩定和減隔振需求,設計了相機柔性適配裝置(如圖9所示),安裝于平臺與相機之間。相機柔性適配裝置主要包括支撐環框、柔性組件、解鎖組件三部分。其中,柔性器由隔振彈簧和特定頻率阻尼增強的磁阻尼器組成,是實現減隔振功能的主要部件。

圖9 相機柔性適配裝置Fig.9 Flexible adapter of camera
通過柔性器動靜剛度測試和單機阻尼測試,獲取了柔性器的剛度、阻尼特性,在此基礎上進行仿真分析得到,相機柔性適配裝置在10~500 Hz范圍內,插入損失總均方根值不低于80%;在0.4倍頻、基頻處的插入損失不低于90%。
3 系統級微振動抑制驗證
3.1 地面試驗驗證
為了更準確地測量加入減隔振措施前后,星上活動部件擾動下的微振動響應,以驗證微振動抑制措施的有效性;同時獲取微振動經過平臺結構傳遞的動態特性,為修正平臺結構微振動傳遞模型提供依據,需要在衛星研制的不同階段,根據需求設計并開展整星微振動試驗。
高分多模衛星開展了安裝并聯隔振裝置與不安裝并聯隔振裝置兩種狀態的整星微振動試驗,如圖10所示。衛星采用支撐式自由邊界條件模擬工裝模擬衛星在軌時的自由-自由邊界。試驗過程中,在擾動源、有效載荷等關鍵部位布置了高靈敏度加速度計,獲取了各關鍵部位的加速度響應,同時采用激光陀螺作為角位移傳感器來獲取了相機的角位移響應。試驗結果表明:衛星主結構對微振動具有良好的衰減作用,各關鍵設備均未發生與CMG特征頻率耦合共振現象;CMG擾動主要集中在CMG工頻的0.4倍頻和基頻兩個頻點,基頻處幅值最高;相機典型積分時間內CMG擾動引起的相機主框角位移未超過0.1像元;并聯隔振裝置、相機柔性適配結構分別能夠將微振動響應衰減83%、91%以上,以上結果均滿足指標要求。

圖10 整星微振動試驗Fig.10 Micro-vibration test of the whole satellite
為獲取正樣設計狀態下載荷適配結構和星敏感器、CMG等關鍵設備安裝結構的局部頻率特性,以及CMG模塊與服務艙立柱連接點到各關鍵設備在關鍵頻點和關注頻率范圍內的傳遞特性,并為修正微振動分析模型提供依據,高分多模衛星在正樣階段開展了微振動局部耦合特性測試。試驗結果進一步表明星敏感器、CMG等關鍵設備安裝結構的局部頻率均未與CMG特征頻率發生耦合。
通過初樣階段的整星微振動試驗和正樣階段的微振動局部耦合特性測試,可充分證明星上星敏感器、CMG等關鍵設備安裝結構的局部頻率均未與CMG特征頻率發生耦合,并聯隔振裝置、相機柔性適配結構的微振動響應衰減率均滿足指標要求,整星微振動抑制設計可滿足相機成像需求。
3.2 仿真分析與在軌響應預示
1)有限元建模
微振動仿真分析是微振動抑制設計與驗證的重要手段之一。高分多模衛星建立了在軌狀態有限元模型(如圖11所示),并根據微動隔振器特性測試、相機柔性適配裝置柔性器特性測試、整星微振動試驗、整星微振動局部耦合特性測試等試驗結果不斷進行修正,指導微振動方案驗證、微振動試驗預示、在軌微振動響應及成像質量預示等各個階段的微振動設計與驗證工作。

圖11 高分多模衛星在軌狀態有限元模型Fig.11 Finite element model of GFDM-1 satellite on orbit
2)CMG到關鍵位置傳遞特性分析
利用有限元模型可計算得到CMG到相機、陀螺、星敏等關鍵位置的傳遞特性,具體方法為:在CMG安裝點施加單方向的單位擾動力,計算相機等關鍵位置的頻域響應,進而得到CMG到各關鍵位置的傳遞特性。高分多模衛星通過仿真分析得到CMG到相機主鏡、次鏡的傳函曲線如圖12所示。

圖12 CMG安裝點到相機傳遞函數Fig.12 Transfer function from CMG to camera
由圖12可以看出,由CMG安裝點至相機、陀螺和星敏的傳函在0.4倍頻、基頻處都具有一定的衰減效果;各關鍵設備均未發生與CMG特征頻率耦合共振現象。分析結果還表明,經過并聯隔振裝置,響應衰減優于80%;經過相機柔性適配裝置,響應衰減約90%。
3)相機微振動響應分析
根據CMG擾動特性實測數據和CMG到相機主鏡、次鏡等關鍵位置的傳遞函數,采用基于模態疊加的時域響應分析方法進行計算,可得到相機主鏡、次鏡等關鍵位置的微振動響應。仿真得到高分多模衛星相機主鏡的時程響應曲線,以及在俯仰、滾轉兩個方向的角振動曲線如圖13所示,主鏡角振動峰峰值約為3×10-8rad,按照相機剛體假設,采用主鏡角位移近似代替相機抖動,則相機角振動量約為0.05像元,滿足指標要求。
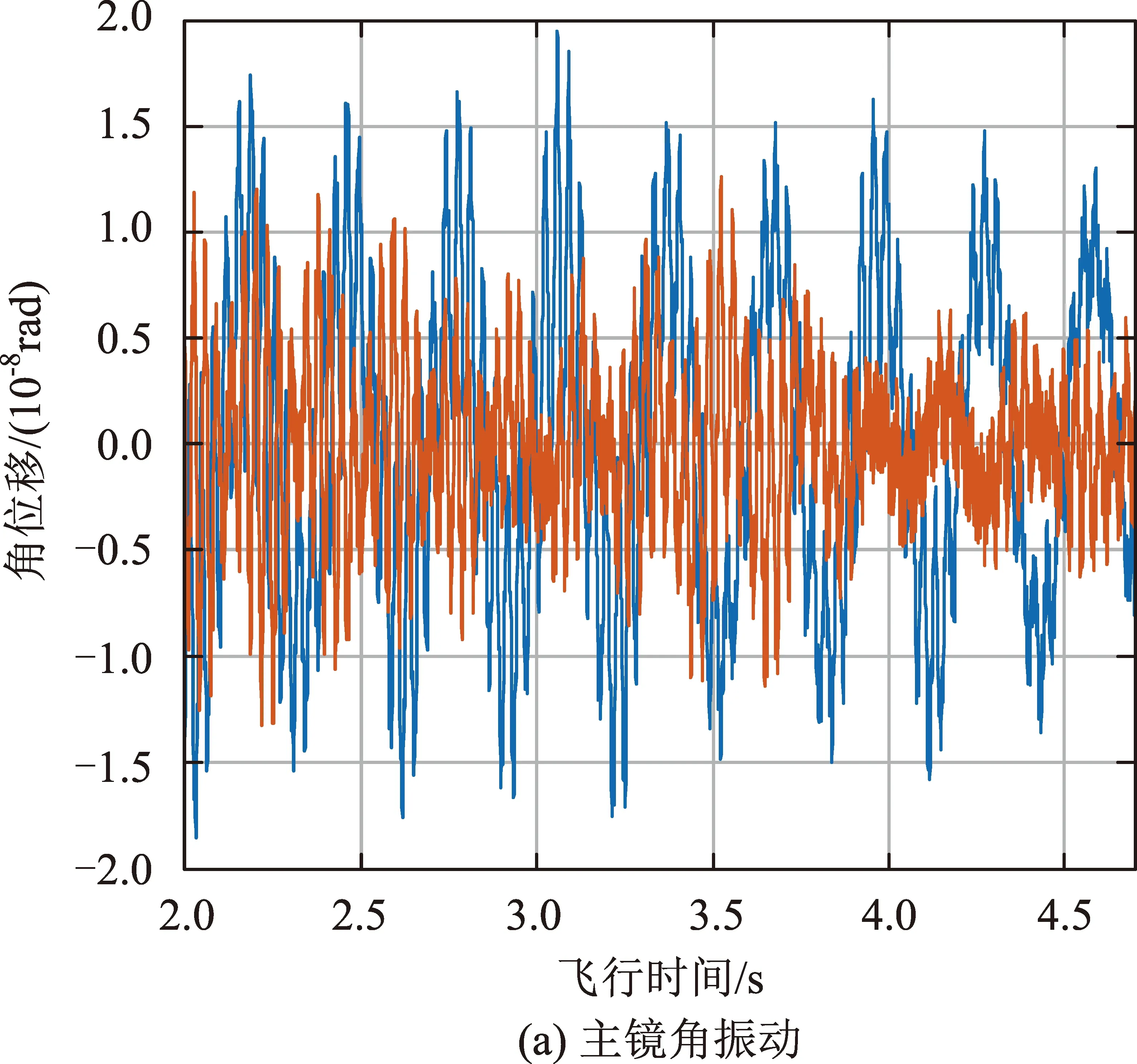
圖13 相機主鏡微振動響應Fig.13 Micro-vibration response of camera
4)像移分析
采用光學靈敏度方法進行像移分析。由光學系統模型得到光學靈敏度矩陣,然后根據有限元響應分析可得到的各光學元件6自由度時域響應曲線計算像移時程曲線。計算結果表明,高分多模衛星典型工況與曝光時間內像移量最大值小于0.1像元,滿足指標要求。
3.3 飛行驗證
采用仿真分析和地面試驗進行整星在軌微振動預示存在一定的誤差與局限性,采用星載測量設備對衛星在軌運行階段的微振動進行測量,是獲取在軌微振動響應最直接、最準確的手段[11-12]。綜合考慮關鍵載荷布局、微振動傳遞路徑與微振動響應特性,在CMG安裝點、CMG隔振桿與立柱連接點、陀螺組件、相機柔性適配裝置、相機主鏡、相機次鏡等關鍵位置布置了13個微振動傳感器,對衛星平飛、機動2種工況下的微振動響應進行了測量,采樣頻率為4800 Hz。某平飛時段在軌測量得到的CMG安裝點、相機主鏡的時域、頻域微振動響應曲線如圖14所示。

圖14 在軌測量微振動響應曲線Fig.14 Micro-vibration response curves measured on orbit
通過對高分多模衛星在軌測量數據進行處理分析可知:星上微振動頻率特性與理論值一致,主要包含CMG工頻的0.4倍頻、基頻、二倍頻和三倍頻等幾個頻點,其中基頻、二倍頻處峰值較大,0.4倍頻、三倍頻處峰值較小;CMG擾動經過CMG支架、CMG并聯隔振裝置、立柱、載荷適配結構、相機柔性適配裝置明顯逐級衰減,全路徑擾動衰減率在90%以上,傳遞到相機的響應已接近噪聲級。高分多模衛星微振動抑制方案效果顯著,成功滿足了敏感載荷的微振動抑制需求。
高分多模衛星在軌拍攝圖像輪廓清晰、無扭曲變形,進一步表明高分多模衛星微振動抑制措施可有效保證成像質量,圖15為其拍攝的迪拜機場。

圖15 拍攝的迪拜機場Fig.15 Dubai airport photographed
4 結論
為保證成像質量,高分多模衛星系統性地開展了衛星微振動抑制方案設計與驗證工作,包括微振動抑制總體方案設計、微振動對成像質量影響鏈路分析、微振動抑制需求分析、減隔振裝置設計、微振動仿真分析、地面試驗驗證與飛行驗證等。
在軌測量數據表明,CMG擾動經過CMG支架、CMG并聯隔振裝置、立柱、載荷適配結構、相機柔性適配裝置明顯逐級衰減,傳遞到相機的響應已接近傳感器噪聲量級,表明高分多模衛星微振動抑制方案效果顯著,成功滿足了敏感載荷的微振動抑制需求。
高分多模衛星微振動抑制設計與驗證方法,以及高分多模衛星研制的并聯隔振裝置、相機柔性適配裝置等減隔振產品均具有較強的通用性,可為我國后續敏捷型遙感衛星的微振動抑制設計與驗證提供參考。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
哲學評論(2021年2期)2021-08-22 01:53:34
天天愛科學(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數學物理學報(2017年6期)2018-01-22 02:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50