純電動城市客車動力系統參數匹配及仿真分析
2021-07-03 02:51:02沈鑫澤何鋒鄭永樑王文亮
農業裝備與車輛工程 2021年6期
關鍵詞:控制策略
沈鑫澤,何鋒,鄭永樑,王文亮
(550025 貴州省 貴陽市 貴州大學 機械工程學院)
0 引言
汽車工業在新時代發展中需要同時考慮環境問題和能源問題所帶來的影響,因此企業運用先進車輛信息技術來研發新能源汽車是發展汽車工業的必經之路。純電動客車作為新能源汽車的重要組成部分之一,也逐漸被各大制造商認可。
為提高新能源汽車性能,近年來有關其匹配設計優化方案的研究也越來越多。田韶鵬[1]等通過增大主減速器傳動比來提高汽車的工作效率;袁苑[2]等通過某純電動客車的技術參數驗證了Cruise 軟件仿真分析的可行性;朱日瑩[3]等對電動汽車整車及開關磁阻電機的動態性能進行了仿真分析,同步提高了蓄電池利用效率和整車性能;車帥[4]利用MATLAB 軟件建立了內部管控策略模型,與HIL 臺架進行聯合仿真結果分析。由此可見,對純電動汽車動力系統參數匹配等方面的研究具有現實意義。
本文選擇某純電動城市客車,匹配設計動力系統的相關技術參數,利用Cruise 軟件對車輛模型進行模擬仿真,聯合Simulink 模擬在多種工況條件下的整車動力性能和經濟性能,為實車試驗提供數據參考。
1 動力系統參數匹配設計
純電動汽車動力系統參數不僅能夠通過合理的匹配設計來改善整車性能,還可以為Cruise 軟件模型提供數據支持。
1.1 整車參數和性能要求
以某純電動城市客車為例,總質量13 800 kg,迎風面積6.8 m2,空阻系數0.65,滾動半徑0.471 m,轉動慣量系數為1.1,具體性能設計要求見表1。

表1 車輛設計要求Tab.1 Vehicle design requirements
1.2 驅動電機的選型和參數匹配
根據汽車動力學,阻力所消耗的功率包含滾動阻力功率、空氣阻力功率、坡度阻力功率以及加速阻力功率,4 種功率的平衡方程為

整車所需功率應均滿足最高車速、爬坡性能和加速性能的需求功率P1,P2和P3,最終需求功率應大于上述3 種功率[5]。
當所需功率達到最高車速時可計算為

式中:m——整車質量;f——滾動阻力系數;CD——風阻系數;A——迎風面的面積;u——車速;ηT——傳動系傳動效率。
利用MATLAB 軟件計算不同車速下的需求功率如圖1 所示。
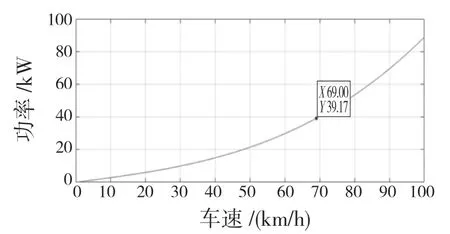
圖1 功率圖Fig.1 Power diagram
規定城市客車最高車速69 km/h 對應的需求功率P1=39.17 kW。
滿足爬坡性能時的需求功率可計算為

式中:vi——車輛完成爬坡時的速度;αmax——最大爬坡角;imax——最大爬坡度。αmax=arctan imax。
利用MATLAB 分別計算速度為10 km/h,爬坡度為7%和12%時所需電機功率。7%持續爬坡電機需求功率為32.45 kW;12%最大爬坡度電機功率為52.63 kW。4%爬坡度下速度為30 km/h時需求功率為63.09 kW,50 km/h 時需求功率為110.4 kW。持續爬坡時使用的功率是電機的額定功率,滿足爬坡性能時所需功率約等于雙倍的額定功率,因此為124.18 kW。
滿足加速性能時的需求功率可計算為
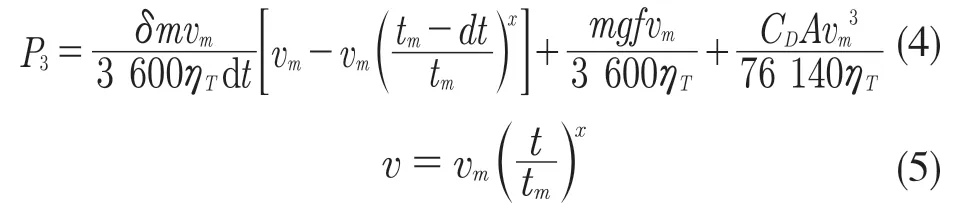
式中:通常取擬合系數x 為0.5;tm——加速過程的時間;vm——加速過程的末速度。
擬合結果如圖2 所示。根據加速度指標,18 s內完成0~50 km/h 加速,P3=117.1 kW。

圖2 車速功率擬合Fig.2 Vehicle speed power fitting
因此,最終電機所需功率P ≥{P1,P2,P3}max。
行駛阻力方程為

式中:Tm——需求扭矩,N·m;ig——變速箱速比;i0——主減速比;η——傳動效率,%;r——輪胎半徑,m。
通過扭矩計算,10 km/h 下12%坡度下所需電機最大扭矩和額定轉速見表2。
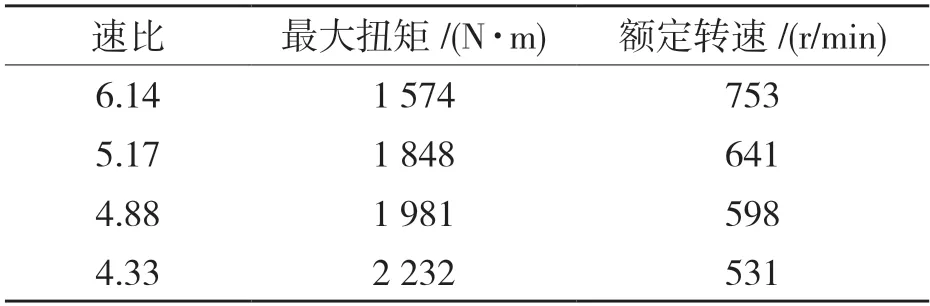
表2 不同速比對比Tab.2 Comparison of different speed ratios
根據最大功率和最大扭矩繪制電機初步選型區間,最后選型的外特性應包絡此區域。
最終選擇的電機數據見表3。

表3 電機數據Tab.3 Motor data
所選電機包絡如圖3 所示,匹配計算范圍滿足要求。
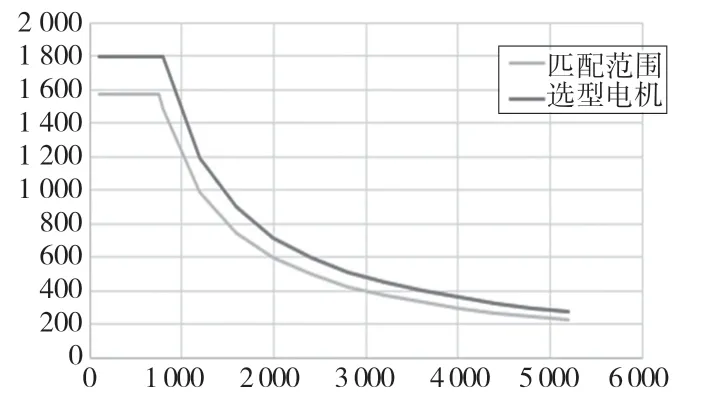
圖3 電機外特性Fig.3 External characteristics of the motor
1.3 電池匹配計算
在動力電池中,磷酸鐵鋰蓄電池具備安全環保、成本低、可循環使用壽命長且無記憶效應等特點,因此選擇磷酸鐵鋰蓄電池匹配計算電池容量和電池組數目。
電池選型先輸入已有電池單體的開路電壓(OCV)曲線,使用單個電池包,評估中國城市客車循環工況(CCBC)與40 km/h 等速工況的電耗值和續駛里程如表4 和表5 所示。

表4 65%加載下的能耗Tab.4 Energy consumption under 65% load

表5 經濟性指標Tab.5 Economic indicators
計算可得,40 km/h 等速工況下的能耗為121.623 kW·h,CCBC 循環工況下單個電池組的循環能耗為106.38 kW·h。選用的電池參數匹配結果見表6。
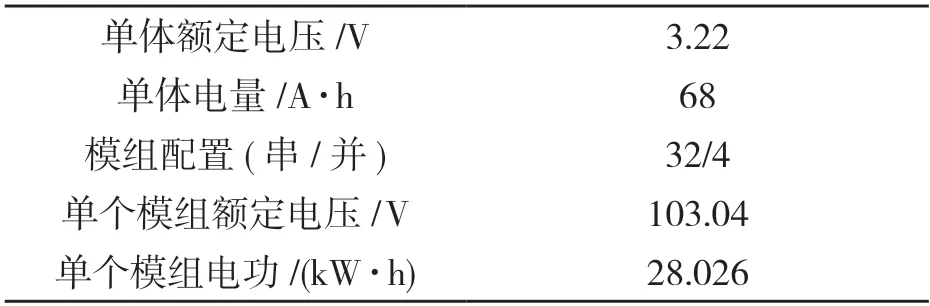
表6 電池參數匹配結果Tab.6 Matching results of battery parameters
所需電池組數目如下:

式中:d——放電深度,通常取0.8。
由此可得,6 個標準箱串聯,并聯數目4 個,單體電池需求總量為768個,電池組總容量為272 A·h,總電壓為618 V,總電功為168.156 kW·h。
2 Cruise 建模
2.1 整車模型搭建
Cruise 軟件采用模塊化布置,通過實施交互式環境圖形化,只需增添模塊,建立標準的機械連接和信號連接,即可快速建立車輛的系統結構,進行精準計算,且易于修正配置,可與Simulink進行協同仿真。因此本文選用Cruise 軟件對純電動城市客車進行模型搭建,如圖4 所示。
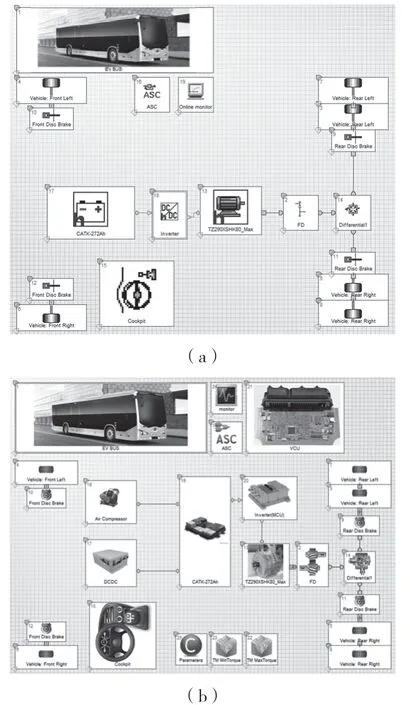
圖4 整車模型Fig.4 Vehicle model
在整車控制模塊中錄入車輛基本特征參數[6]。輸入電機的類型、工作模式、額定電壓、最高轉速和電機特性參數。輸入電池的單體相關信息、電池組的串并數和電池單體的OCV 特性曲線。由于電機的額定電壓只有380 V,需要DCDC 充當電機控制器模塊。選用的電機為150 kW,所以轉換功率要大于150 kW。設置高壓邊的額定電壓,低壓邊的額定電壓完成電壓的轉換。定義電機的最大扭矩與最小扭矩定義、傳動速比與傳動效率以提供控制策略使用。
2.2 控制策略搭建
通過Simulink 的RTW 生成動態鏈接庫DLL文件,輸入信號連接驅動模塊如圖5,通過聯通Cruise 軟件以實現數據和信息的共享。
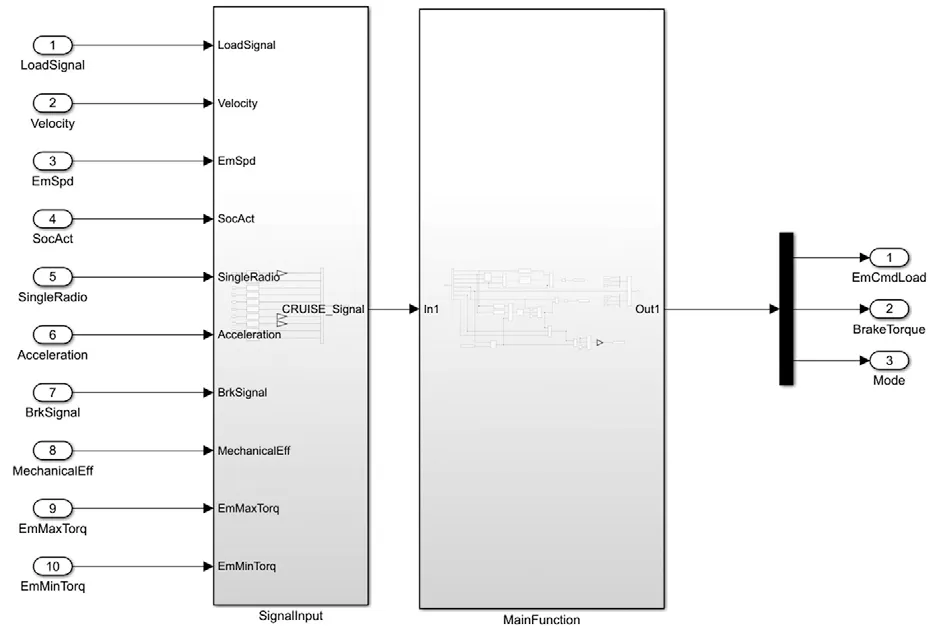
圖5 輸入信號連接驅動模塊Fig.5 Input signal connection to drive module
整車控制策略的主要內容就是解決對發動機和電動機能量輸出的合理分配問題。純電動汽車控制策略通常是根據電池的荷電狀態(SOC)、加速度和油門開度,使電動機輸出相應的扭矩,本文以扭矩控制為主要參數進行計算。
驅動扭矩限制是根據當前工況下驅動扭矩的最大允許值,對驅動電機限制其輸出扭矩,以保障整車安全性能。當驅動電機過載運行時,升高溫度值過大,電機驅動系統易損毀。扭矩限制的控制策略是依據驅動電機的驅動扭矩需求,限制輸出電機控制信號。
根據當前車速與油門開度決定需求扭矩,如圖6 所示。
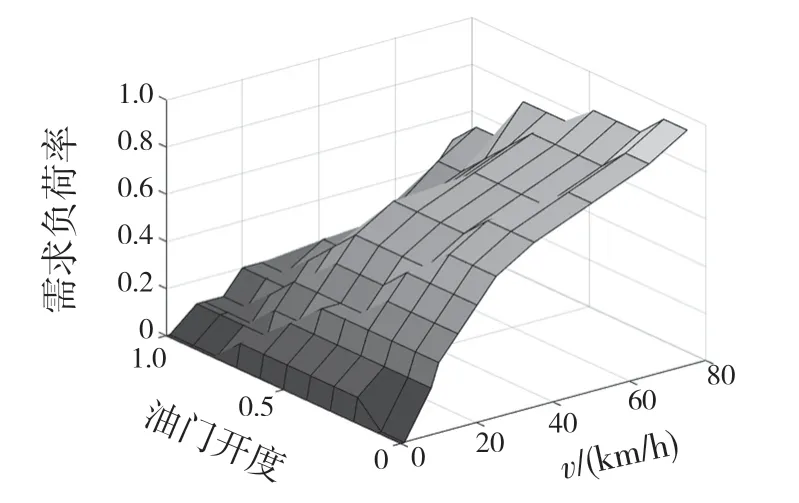
圖6 油門開度所需扭矩Fig.6 Torque required for throttle opening
通過SOC 限制輸出扭矩,可避免在低SOC下放電,并且能夠延長電池壽命。對驅動扭矩變化率進行限制,以防扭矩突變。結合SOC 限制系數與限制扭矩,獲得電機控制信號,并對最后的扭矩是否滿足電機外特性進行判斷,輸出電機控制信號。為避免出現電機回收與駕駛員制動需求不相符的情況,應進行相應的機械制動補償制定。最后通過判斷制動踏板實現模式切換。驅動扭矩控制策略如圖7 所示。
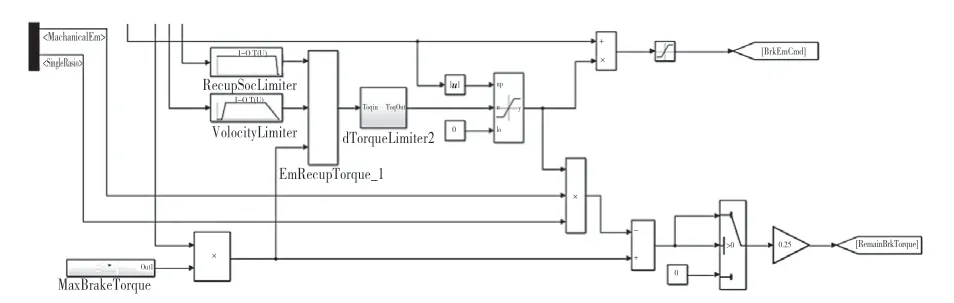
圖7 驅動扭矩控制策略Fig.7 Drive torque control strategy
3 仿真結果分析
3.1 動力性分析
(1)最高車速分析
由Cruise 動力性模型進行仿真計算,結果見圖8,所得最高車速是124 km/h,達到國標最高車速要求,并采用控制策略對驅動扭矩進行限制。
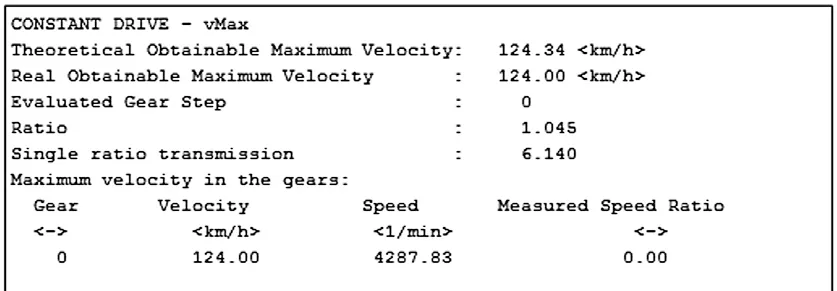
圖8 動力性指標計算結果Fig.8 Calculation results of dynamic index
(2)最大爬坡度分析
根據國標要求,對其爬坡工況進行仿真,仿真結果如圖9、圖10 所示。最大爬坡度是16.81%,可以達到車輛設計要求。
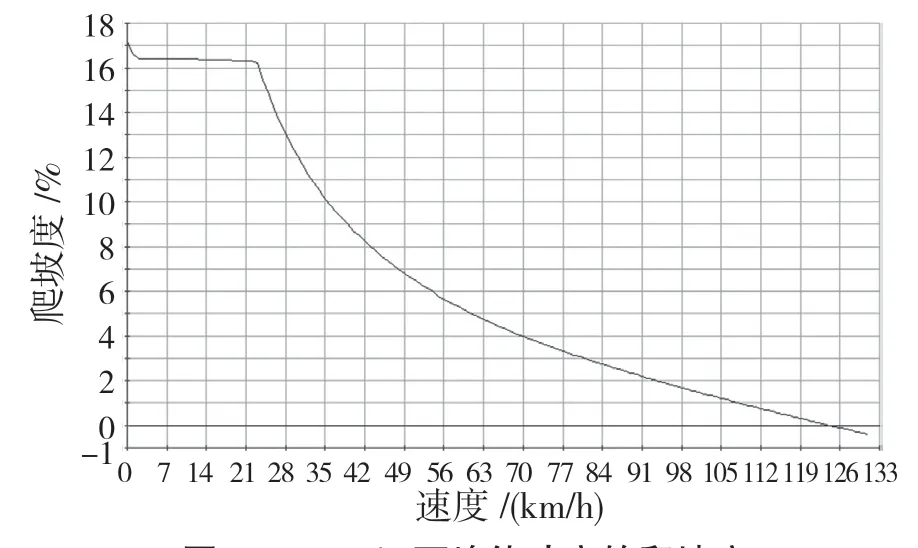
圖9 10 km/h 下峰值功率的爬坡度Fig.9 Gradeability of peak power at 10 km/h
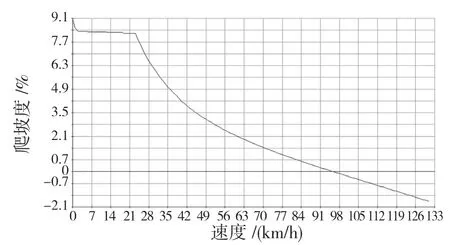
圖10 10 km/h 下額定功率的爬坡度Fig.10 Gradeability of rated power at 10 km/h
(3)加速時間分析
純電動城市客車在滿載狀態下,速度0~50 km/h所需加速行駛的時間為12.11 s,動力穩定輸出,符合車輛設計要求。具體數據如見表7 和圖11。
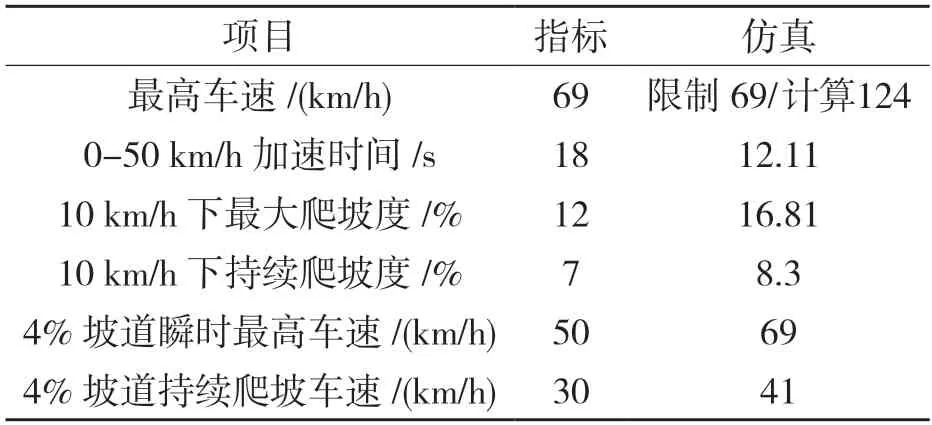
表7 動力性仿真數據Tab.7 Dynamic simulation data
3.2 經濟性分析
對CCBC 工況和40 km/h 等速工況進行仿真,仿真結果如圖12、圖13。CCBC 工況下百公里電耗53.19 kW·h,續駛里程260 km;40 km/h 等速工況下百公里電耗34.26 kW·h,續駛里程370 km,均符合車輛設計要求。

圖12 CCBC 工況跟隨結果Fig.12 CCBC working condition following results
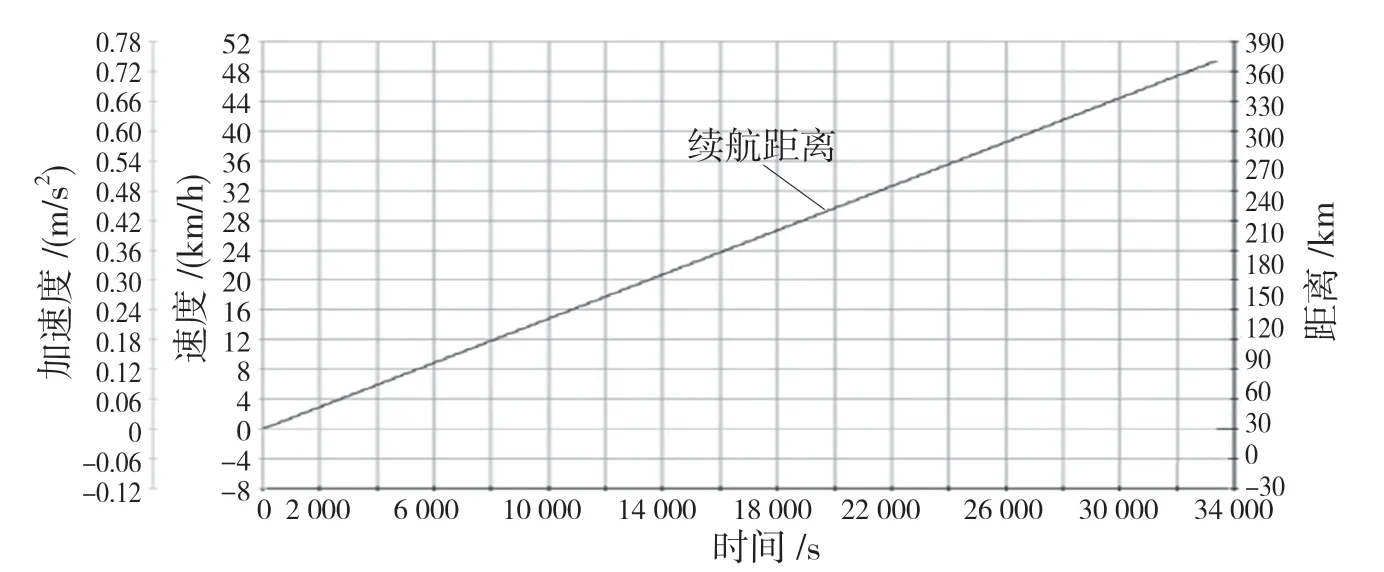
圖13 40km/h 等速工況續航結果Fig.13 Endurance results of 40 km/h constant speed condition
4 結論
(1)根據電動城市客車的設計目標,應用Cruise 軟件在匹配設計相關參數基礎上搭建純動力系統模型,聯合Simulink 設計控制策略限制驅動扭矩的輸出,仿真分析其動力性能和經濟性能。
(2)通過仿真結果,最高車速、最大爬坡度、加速時間和續駛里程與此車輛設計要求是相符的,驗證了動力系統參數匹配方案和搭建的仿真模型的有效可靠性,為后續的研究提供了一定基礎。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36