兩擋AMT純電動汽車換擋控制研究
2021-07-03 02:51:18龔俊杰谷金良龔莎蔡志華
農(nóng)業(yè)裝備與車輛工程 2021年6期
關(guān)鍵詞:模型
龔俊杰,谷金良,龔莎,蔡志華
(411201 湖南省 湘潭市 湖南科技大學(xué) 機電工程學(xué)院)
0 引言
電動汽車能夠較好地解決石油短缺問題[1]和環(huán)境污染問題,因此,一直是近年來車輛研究的熱點。而減小換擋沖擊度[2]則一直是電動車熱門研究方向之一。近年來研究人員對減小電動汽車換擋沖擊度做了許多研究[3]。文獻[4]以AMT 變速箱系統(tǒng)為研究對象,對換擋沖擊的產(chǎn)生原因做了系統(tǒng)的研究,將整個換擋過程重新進行劃分,并對換擋電機進行了拉格朗日建模,有效減小了換擋時的沖擊度;文獻[5]以提升電機工作效率為研究目標(biāo),開展了基于驅(qū)動電機的換擋控制方法和整車綜合換擋規(guī)律等相關(guān)技術(shù)的研究,比較好地提升了電動汽車的換擋品質(zhì),減小了換擋沖擊度。文獻[6]設(shè)計出了一種基于速度指令前饋補償和狀態(tài)反饋控制器的速度控制算法,實現(xiàn)了無沖擊的高效換擋效果。文獻[7]對永磁同步電機控制技術(shù)和綜合換擋決策進行了深入的理論研究,設(shè)計了一款基于模糊滑模的SVPWM-DTC 的PMSM 控制策略,實驗結(jié)果表明這種控制策略能較好地減小沖擊度。文獻[8]設(shè)計出了一套電機和變速箱一體化方案和可靠性驗證的實驗方法,實現(xiàn)了AMT 電動汽車平穩(wěn)、快速換擋;文獻[9]對動力系統(tǒng)建立起了一套動力學(xué)模型,通過研究換擋過程中齒輪的角速度變化的規(guī)律,得到了換擋傳動機構(gòu)角速度的軌跡,對減小換擋沖擊具有積極意義。文獻[10]利用ADAMS 和dSPACE 軟件來進行數(shù)據(jù)的采集,通過Meca 軟件標(biāo)定控制參數(shù),最終確定了最優(yōu)的PWM 指令,從而減小了換擋時的沖擊。文獻[11]提出并用實驗驗證了機電耦合控制的變模沖擊抑制方法。文獻[12]基于駕駛員意圖設(shè)計出了一種平穩(wěn)換擋的動態(tài)控制算法,結(jié)果表明,能較好地提升換擋品質(zhì)。文獻[13]針對雙模耦合驅(qū)動系統(tǒng)的結(jié)構(gòu),采用加裝扭轉(zhuǎn)減振器的方式以減小沖擊度;文獻[14]通過采用驅(qū)動電機補償?shù)姆绞綔p小了換擋沖擊。文獻[15]以純電動汽車為研究對象,對具有固定速比的兩擋變速器的換擋平順性進行了較為深入的研究;同時,設(shè)計了一種新型兩擋變速系統(tǒng),以實現(xiàn)改善換擋平順性的目的。文獻[16]詳細分析了換擋各階段沖擊度產(chǎn)生的機理,并提出了利用驅(qū)動電機轉(zhuǎn)矩清零與轉(zhuǎn)矩恢復(fù)的控制方法減小換擋沖擊度,實車實驗表明,所制定的控制方法能夠避免沖擊度過大。
本文以減小兩檔AMT 電動汽車換擋時的沖擊度為目標(biāo)。基于MATLABb/Simulink 對整車建立模型:包括駕駛員模型、換擋電機模型、整車模型、AMT 傳動系統(tǒng)模型及驅(qū)動電機模型,實現(xiàn)了汽車AMT 系統(tǒng)的仿真。分別給定上坡路面和下坡路面兩種工況進行仿真。仿真結(jié)果表明:換擋時的沖擊度在國家允許范圍17 m/s3之內(nèi),這驗證了本文中所設(shè)計的換擋控制器的正確性。
1 數(shù)學(xué)模型
汽車動力系統(tǒng)是一個比較復(fù)雜的系統(tǒng),為驗證所設(shè)計的控制器的有效性和正確性,采用MATLAB/Simulink 工具對汽車AMT 系統(tǒng)進行建模仿真分析。本文對整車模型做了一定的簡化處理,從而使得仿真在保證結(jié)果準(zhǔn)確性的前提下能夠快速驗證換擋策略的正確性和有效性。對整個模型做出了以下的具體假設(shè):(1)汽車各零部件的質(zhì)量集中;(2)不考慮整個系統(tǒng)中的彈性阻尼;(3)不考慮橫向受力情況;(4)不考慮汽車行駛中振動和擺振的影響。
1.1 整車模型
根據(jù)對汽車行駛過程中驅(qū)動力和行駛阻力的分析,可以得到汽車的行駛方程為

式中:Ff——滾動阻力;Fw——空氣阻力;Fi——坡道阻力;G——汽車重力;θ——坡度角;M——汽車質(zhì)量;g——重力加速度,一般取9.8 m/s2;f——滾動阻力系數(shù);f——空氣阻力系數(shù);A——迎風(fēng)面積;ρ——空氣密度;u——汽車速度。
車輛基本參數(shù)見表1。

表1 車輛基本參數(shù)Tab.1 Basic parameters of vehicle
1.2 傳動系統(tǒng)模型
傳動系統(tǒng)在整車中的作用是傳遞電機轉(zhuǎn)速和轉(zhuǎn)矩,本文在對傳動系統(tǒng)建模的過程中,忽略傳動系統(tǒng)的機械特性,只考慮傳動系統(tǒng)的機械效率,其關(guān)系如下:

式中:Tin,Tout——傳動系統(tǒng)的輸入轉(zhuǎn)矩和輸出轉(zhuǎn)矩;nin,nout——傳動系統(tǒng)的輸入轉(zhuǎn)速和輸出轉(zhuǎn)速;ig——傳動比;ηT——傳動效率。
傳動系統(tǒng)所用基本參數(shù)見表2。

表2 傳動系統(tǒng)基本參數(shù)Tab.2 Basic parameters of transmission system
1.3 驅(qū)動電機模型
驅(qū)動電機既是電動汽車的核心,又是AMT系統(tǒng)的核心組成部分,本文所選用的永磁同步電機,峰值扭矩為145 N·m,峰值功率為60 kW。其轉(zhuǎn)矩、功率和頻率圖如圖1 所示。
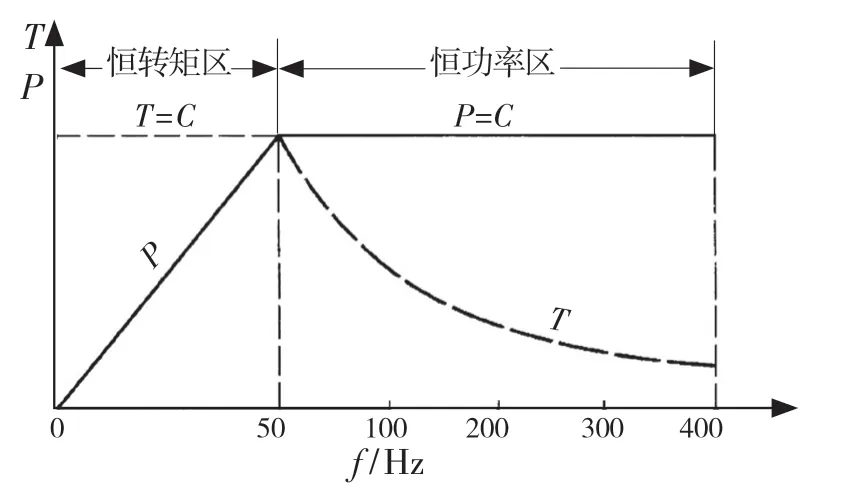
圖1 電機輸出特性曲線Fig.1 Motor output characteristic curve
驅(qū)動電機消耗的功率通過式(6)計算:

式中:p——電機功率,T——電機輸出轉(zhuǎn)矩,n——電機轉(zhuǎn)速,η——效率。
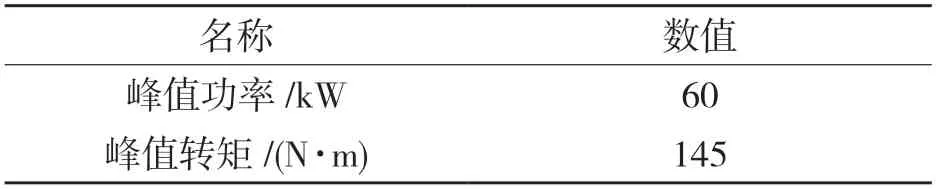
表3 驅(qū)動電機主要參數(shù)Tab.3 Main parameters of drive motor
1.4 換擋電機建模
在AMT 換擋過程控制中,換擋電機的控制與換擋品質(zhì)有著密切的關(guān)系,本文所選的換擋電機是直流有刷電機。從本質(zhì)上說,對換擋電機的控制即直流有刷電機的控制,因此對換擋電機控制是至關(guān)重要的。原理圖如圖2 所示。

圖2 換擋電機原理圖Fig.2 Schematic diagram of shift motor
根據(jù)基爾霍夫電壓定律和牛頓第二定律,建立關(guān)于換擋執(zhí)行器電壓的平衡方程和運動基本方程

式中:J——電機軸上的轉(zhuǎn)動慣量;D——電機的阻尼;Tl——電機軸上的負載轉(zhuǎn)矩;U——電機電樞電壓;T——電機輸出力矩;θ——電動機角位移;I——電樞電流;R——電樞電路電阻;L——電樞回路電感;k——反電動勢系數(shù);kt——轉(zhuǎn)矩常數(shù)。
其中

式中:Fl——換擋阻力;r ——齒輪的半徑;ig——蝸輪蝸桿傳動比;iw——換擋機構(gòu)齒輪傳動比;ηg——蝸輪蝸桿傳動效率;ηw——換擋執(zhí)行機構(gòu)齒輪效率。
換擋電機的參數(shù)如表4 所示,聯(lián)立式(8)和式(9)可得

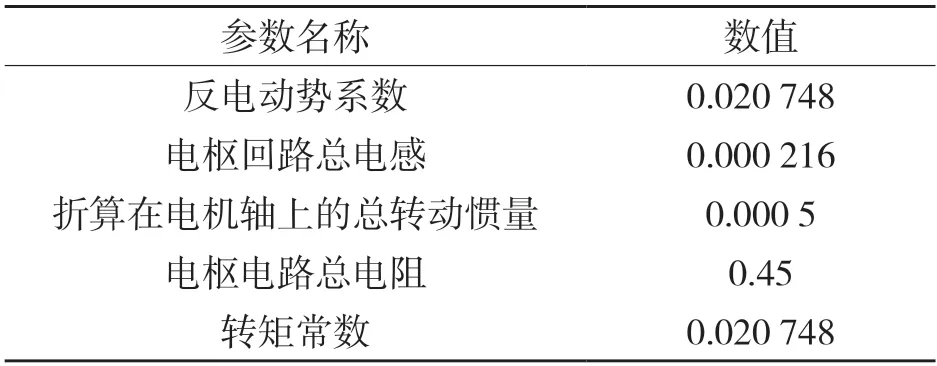
表4 換擋電機基本參數(shù)Tab.4 Basic parameters of shift motor
1.5 駕駛員模型
影響換擋的因素很多,本文以油門開度和驅(qū)動電機輸出轉(zhuǎn)速建立駕駛員模型。
駕駛員的輸出信號:

式中:α——油門開度;T——電機的輸出轉(zhuǎn)矩。
2 控制策略
以電機扭矩、轉(zhuǎn)速、轉(zhuǎn)速比和換擋電機狀態(tài)為輸入,將升擋條件設(shè)為:n>=4 000&&i==i1,降擋條件設(shè)為:n=<2 500 &&i==i2。其中,n 為電機轉(zhuǎn)速;i 為當(dāng)前擋位;i1 為1 擋;i2 為2 擋。如圖3 所示,借助MATLAB 中s-function模塊編寫控制代碼。
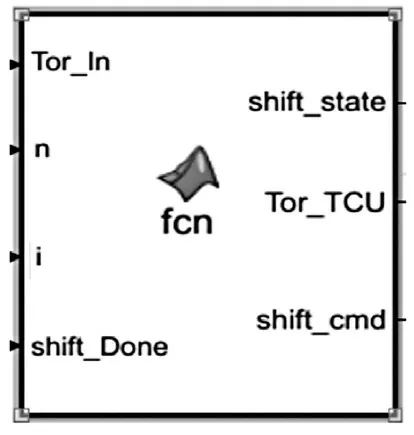
圖3 換擋控制器Fig.3 Shift controller
3 仿真與分析
MATLAB/Simulink 具有適用面廣、結(jié)構(gòu)和流程清晰及仿真精細、貼近實際、效率高、靈活等優(yōu)點,并基于以上優(yōu)點Simulink 已被廣泛應(yīng)用于控制理論的復(fù)雜仿真和設(shè)計。將以上所建立的數(shù)學(xué)模型用MATLAB/Simulink進行建模,如圖4所示,
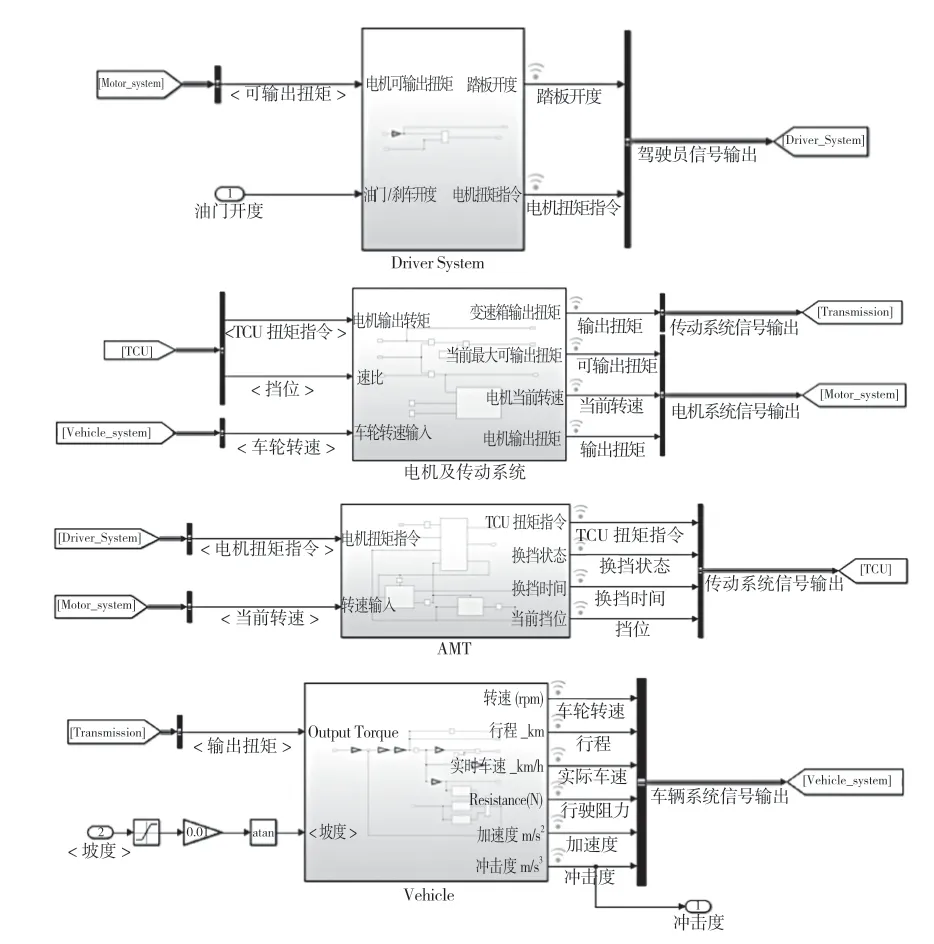
圖4 整車模型Fig.4 Vehicle model
為了驗證模型的正確性,采用100%的油門開度作為輸入信號,即在全加速命令下行駛,將路面坡度分別設(shè)置為20°和-20°二種工況(上坡路面和下坡路面)下進行測試。
3.1 上坡路面仿真
以100%油門開度作為輸入,在上坡路面進行換擋。
如圖5 所示,在第4 s 開始換擋。由于撥叉的滑動,出現(xiàn)短暫的動力中斷,但是外界的阻力依然存在,所以會產(chǎn)生一個向下的沖擊度,持續(xù)時間大約為0.2 s,當(dāng)擋位從1 擋升至2 擋時,由于電機的突然加載,此時會產(chǎn)生一個較大的沖擊度,大小約為15 m/s3。

圖5 上坡路面沖擊度Fig.5 Jerk of uphill road
3.2 下坡路面仿真
以100%油門開度作為輸入,在下坡路面進行換擋。
如圖6 所示,在3.1 s 處開始換擋,仿真結(jié)果與上一種情況類似。由于撥叉的作用也出現(xiàn)了短暫的動力中斷,也產(chǎn)生了向下的沖擊度,在3.5 s時,由于電機的突然加載,也產(chǎn)生了一個加大的沖擊。
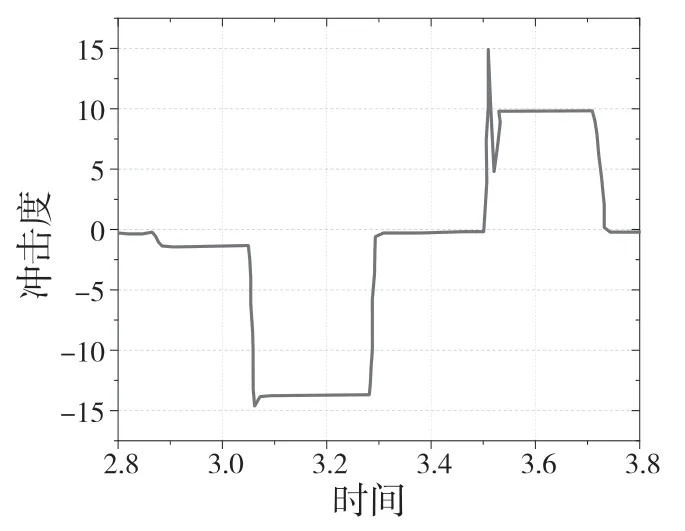
圖6 下坡路面沖擊度Fig.6 Jerk of downhill road
4 總結(jié)
本文圍繞減小電動汽車換擋時的沖擊度這一目標(biāo),基于兩擋AMT 電動汽車設(shè)計出一種控制策略。分別在上坡路面和下坡路面進行仿真實驗,仿真結(jié)果表明,在不同工況下,換擋期間,最大的換擋沖擊度為15 m/s3,皆小于 17 m/s3的國家標(biāo)準(zhǔn),證明該換擋策略的可行性和有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19