基于邊緣計算的交叉路口無人駕駛車輛通行軌跡預測算法
2021-07-03 02:51:04郝璐璐
汽車安全與節能學報 2021年2期
關鍵詞:駕駛員
郝璐璐,謝 輝,宋 康,閆 龍
(內燃機燃燒學國家重點實驗室,天津大學,天津300072,中國)
隨著車輛保有量的迅速增加,城市交叉路口擁堵問題、安全問題、節能與環境問題已經成為全社會聚焦問題。在智能網聯的背景下,清華大學的徐彪[1]等人提出基于遺傳算法和分支定界算法的通行車速計算提高車輛在路口的通行率,北京理工大學的鄒淵[2]等人將有效通行時間的信號燈模型與偽譜法結合降低車輛在路口的能耗,長安大學的徐婷[3]等人提出基于車對萬物 (vehicle to everything,V2X)的駕駛員輔助系統對車輛換道行為預測提高車輛在路口的安全性。在現實情況中,普通車輛沒有搭載感知通信設備,部分駕駛員存在轉彎不打轉向燈等違規操作,單個智能車輛在交叉路口感知范圍受限且無法提前獲取路口其他車輛的信息。這種情況下在智慧道路的路端對交叉路口附近車輛進行準確的軌跡預測,既可以解決城市交通問題,也可以將預測的軌跡信息傳遞給智能車輛,作為智能車輛軌跡規劃的先驗信息,輔助完成車路協同規劃。
目前車輛軌跡預測方法主要分為3大類別:第1種:基于物理機理的預測模型。在該方法中,車輛被視為二維平面內受物理規律控制的物體,通過速度、加速度、位置、軸距、質量等參數的數學關系建立車輛的動力學或運動學模型進行軌跡預測[4]。M. Brannstrom等人[5]為了提高計算效率將車輛動力學模型簡化為自行車模型,A. Houenou等人[6]建立了Descartes坐標系下的車輛狀態矩陣用來表示車輛運動學模型。但是該方法沒有考慮駕駛員自身的特性以及車輛行駛環境的變化,因此只能在短時間內保持預測準確性,隨著時間的增加誤差逐漸增大。
第2種:基于駕駛員意圖的預測模型。它主要分為回歸模型和分類模型,其中回歸模型在駕駛員意圖不明時傾向于輸出所有訓練軌跡的均值,分類模型雖能獲取駕駛員意圖但是卻無法獲取車輛具體的軌跡。XIAO Wei[7]等人利用車輛歷史軌跡與車道線之間的時間與空間關系來進行機動識別,隨著環境復雜度增加,駕駛員意圖的識別分類困難會顯著增加,運算效率降低,同時也忽略了環境因素如交通信號燈和交通規則等外部影響因素存在,這種影響在交叉路口影響顯著。
第3種:基于交互作用的預測模型。FENG Xidong等人[8]利用嵌入生成對抗網絡GAN來預測車輛未來的軌跡,隨著環境復雜度增加,模型運算的復雜度也隨之增加難以滿足實時性的要求,而且不能夠充分考慮交通環境的不確定性。車輛邊緣計算 (mobile edge computing,MEC) 的提出與應用,可改善無人駕駛車輛的時延問題、運算問題及散熱問題[9]。WU Gaoxiang等人[10]提出移動邊緣計算框架以降低無人機的終端負載和能耗。O. Bekkouche 等人[11]通過在邊緣計算平臺中收集處理數據降低時延,并在邊緣計算平臺中處理路徑規劃算法改善網絡資源配置。
本文針對交叉路口固定的道路拓撲結構和交通規則,提出基于支持向量機 (support vector machine,SVM)[12]的駕駛員意圖識別算法,將駕駛員意圖分為直行、左轉和右轉3種類型。結合高精度地圖提出基于最小二乘法和Bezier曲線的擬合算法,擬合出終點位置與車速/加速度的關系以及終點航向角與車速/加速度的關系,通過沿直線搜索法尋找控制點計算出多條Bezier曲線,經過代價函數篩選出1條代價最小的軌跡作為預測軌跡。在邊緣計算中心平臺上,驗證了算法的有效性。
2 研究平臺
本文的研究工作是在天津市海河教育園區中心公園環線開展的,如圖1所示。該線路的17個路口進行了智慧化改造。并且采集了整個智慧道路的高精度地圖,可直接獲取道路限速、路網數據、車道線數據、道路邊沿數據、道拓撲結構數據以及交通標志等數據。
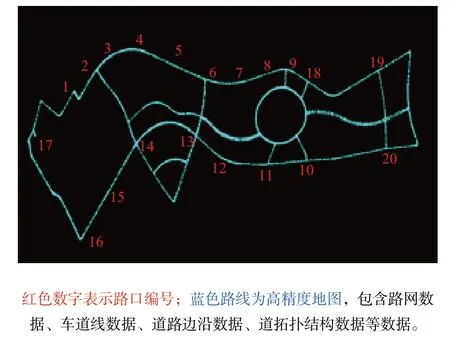
圖1 智慧道路路線圖
2.1 智慧道路硬件平臺
在智慧道路選定的路口配置了激光雷達和Xavier等設備。Xavier是NVIDIA公司推出的一款嵌入式模塊化系統,采用了ARM架構,主要為所在路口提供路側計算服務。激光雷達是由激光器發出的脈沖激光達到目標物體,經一些散射后反射到接收器上,通過激光測距原理和激光點的數量得到目標物體距離信息和三維立體圖像,主要用于交叉路口附近目標車輛的檢測。
本文使用的激光雷達安裝在紅綠燈的豎桿上,具體感知效果如圖2所示。在此平臺中主要用來處理激光雷達的點云數據。設備詳情如表格1所示。
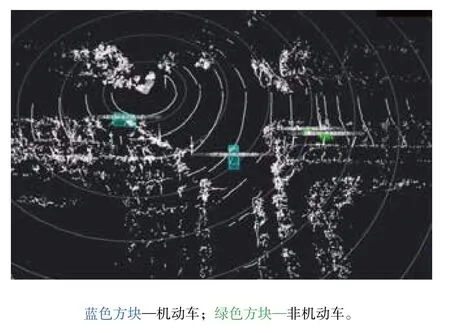
圖2 激光雷達感知效果圖
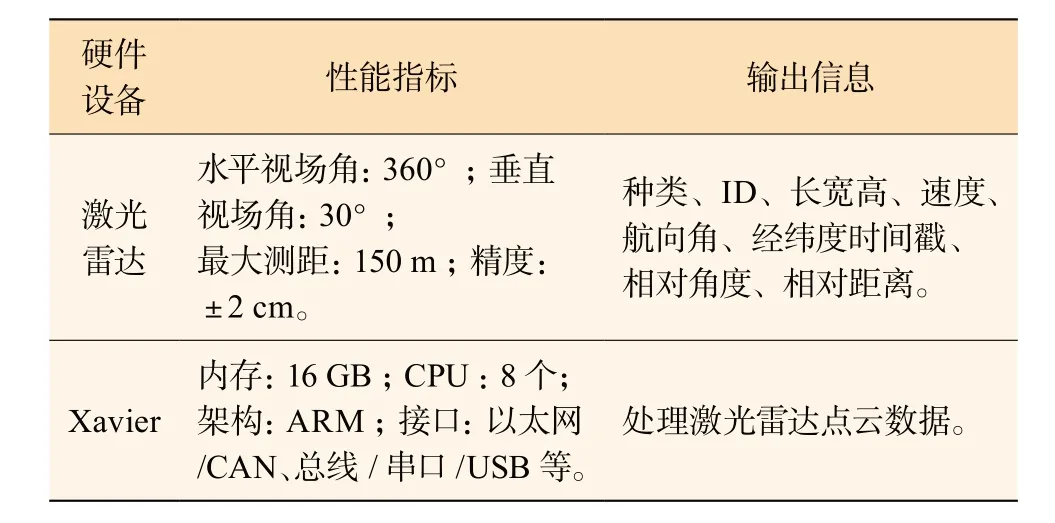
表1 傳感器參數表
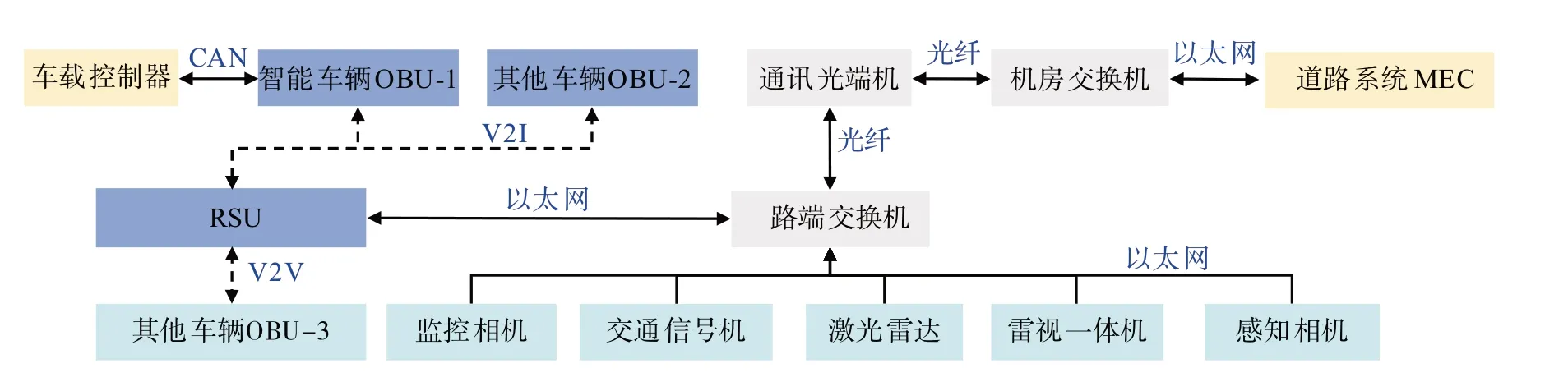
圖3 路側通訊架構圖
整個智慧道路的通訊架構是由基于光纖的全道路通訊和基于V2X車聯網通訊兩部分組成,具體通訊架構如圖3所示。沿圖1所示的路線,鋪設了光纖,能夠保證路端所有設備的數據實時傳回到邊緣計算中心MEC,進行計算處理,MEC位于道路起點處天津大學新校區熱動力大樓內。
2.2 交叉路口感興趣區域
智慧道路交叉路口附近車流量很大,對路側檢測跟蹤帶來很大的挑戰。本文預測的是即將進入路口的車輛而不是遠離路口的車輛。因此本文只關心在感興趣區域(region of interest,ROI)內的目標車輛。對圖1中的9號路口進行ROI的劃分,如圖4所示。圖4中的目標車輛位于路口前-30 m的位置,即車輛在進入路口前30 m的位置。
在圖1中9號路口對230輛車進行數據采集,采集的車輛軌跡簇如圖5所示。

圖4 交叉路口ROI圖
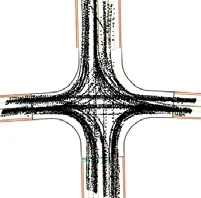
圖5 路口采集車輛軌跡簇
3 交叉路口目標車輛的軌跡預測
車輛在交叉路口時可能會有3種行駛方式如直行、右轉及左轉,如圖6所示。當車輛進入ROI時,路端激光雷達對其進行識別跟蹤,輸出檢測的信息如位置、航向角、速度、相對角度、相對距離等。因為城市交叉路口固定拓撲結構約束和駕駛行為習慣的限制,不同駕駛意圖的車輛在交叉路口時的航向角、相對角度和相對距離等信息是逐漸發生變化的。選取圖6中紅色軌跡簇的車輛數據進行分析。
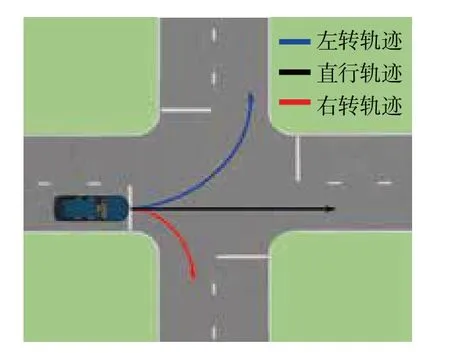
圖6 路口車輛行駛示意圖
如圖7所示,選取采集車輛信息的航向角θ為x軸,車輛相對距離Δd為y軸,車輛的相對角度Δα為z軸。車輛航向角指車頭與正北方的夾角,往東為正。車輛的相對距離指車輛相對于激光雷達安裝位置的距離。車輛的相對角度是指車輛相對于激光雷達的距離。從圖中標注的位置開始,不同駕駛意圖的車輛數據開始出現區別,利用這種數據的變化可對駕駛員意圖進行分類。
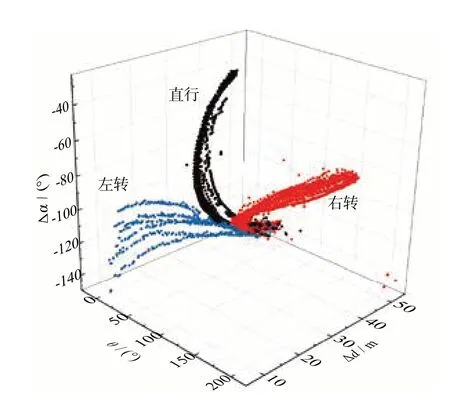
圖7 路口車輛數據分布圖
3.1 基于支持向量機的駕駛員意圖分類算法
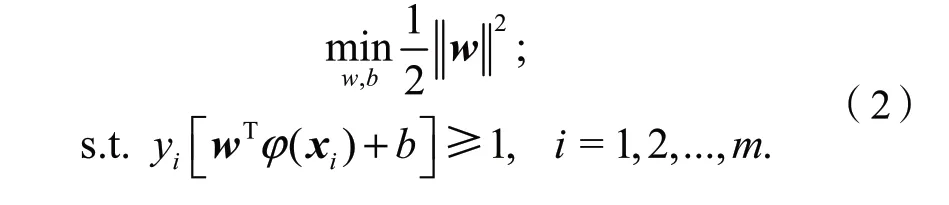
在交叉路口采集的數據主要用作駕駛員意圖識別模型的訓練數據和測試數據。本文使用SVM對交叉路口附近駕駛員意圖進行分類。SVM是一種廣義線性分類器,適用于小樣本、非線性及高維模式中的識別[13]。當輸入特征向量為高維向量時,為解決原始樣本線性不可分問題,將樣本x映射到高維空間,在特征空間中劃分超平面對應的模型為

式中:φ(x)是將x映射后的特征向量,w和b是模型參數,滿足:
直接求解映射到特征空間后的關系式是困難的,因此可以通過求解對偶問題來簡化計算,對偶表達式為

式中:α為每條約束添加的Lagrange乘子,滿足C≥αi≥ 0,其中C為懲罰因子,本文設定為0.8。通過選取不同的核函數(kernel function)取代高維特征空間中的內積運算避免維度災難。本文中選取徑向基函數 (radial basis function,RBF)的Gauss核函數,其表達式為

式中:G是核函數參數,本文設定為1.0。
選取與駕駛員意圖相關性較強的特征向量作為模塊的輸入,每組特征向量給定一個標簽。將標簽表示為T= [-1,0,1],其中-1表示左轉,0表示直行,1表示右轉。當車輛進入感興趣區域時,根據檢測的每包信息進行駕駛員意圖分類并且給出相應的標簽,為了防止誤分類輸出提高分類的準確性,加入了滑動時間窗[14]timewin= [0,0,0,0,0],將每包數據識別出的標簽逐個添加到滑動時間窗內,當滑動時間窗內出現的標簽重復率達到75%以上時,輸出此標簽即為識別的結果。具體的模塊框架如圖8所示。
當車輛進入感興趣區域(ROI)時就可獲取車輛的相關信息,此時就開始預測駕駛員的意圖。隨著車輛到路口前距離L的變化,根據實時檢測的車輛信息識別出的駕駛員意圖概率P也隨之發生變化。如圖9所示,對于直行的車輛,車輛在進入路口前-30 m時輸出的駕駛員意圖為直行,當車輛在進入路口前-5 m時可輸出駕駛員意圖。對于左轉和右轉車輛,在路口前-2 m 的時候,正確的駕駛意圖可進行輸出。因此當車輛位置在路口前-2 m 時,輸出駕駛員意圖預測的最終結果。

圖8 駕駛員意圖分類模塊
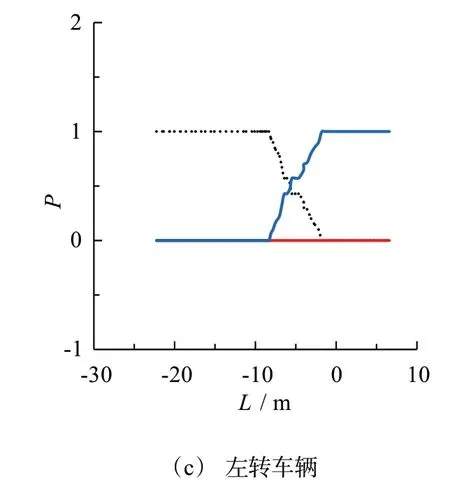
圖9 駕駛員意圖識別概率圖
3.2 軌跡擬合
在獲取駕駛員意圖以后,結合高精度地圖可得知目標車輛大致的行駛趨勢。此時車輛的起點是已知的,終點位置也在未來某個區域內。選擇Bezier曲線[15]、五次多項式[16]及B樣條曲線[17]對同一車輛的軌跡進行擬合,擬合結果如圖10所示。五次多項式擬合時獲取車輛的起點、終點以及轉彎位置,擬合結果與車輛真實軌跡偏差較大。B樣條曲線擬合時需要多個控制點對曲線進行局部控制,控制點計算繁瑣且擬合曲線與車輛真實軌跡匹配度較低。Bezier曲線與車輛真實軌跡匹配度最高,且所需控制點數量較少,因此選定Bezier曲線對車輛軌跡進行擬合。
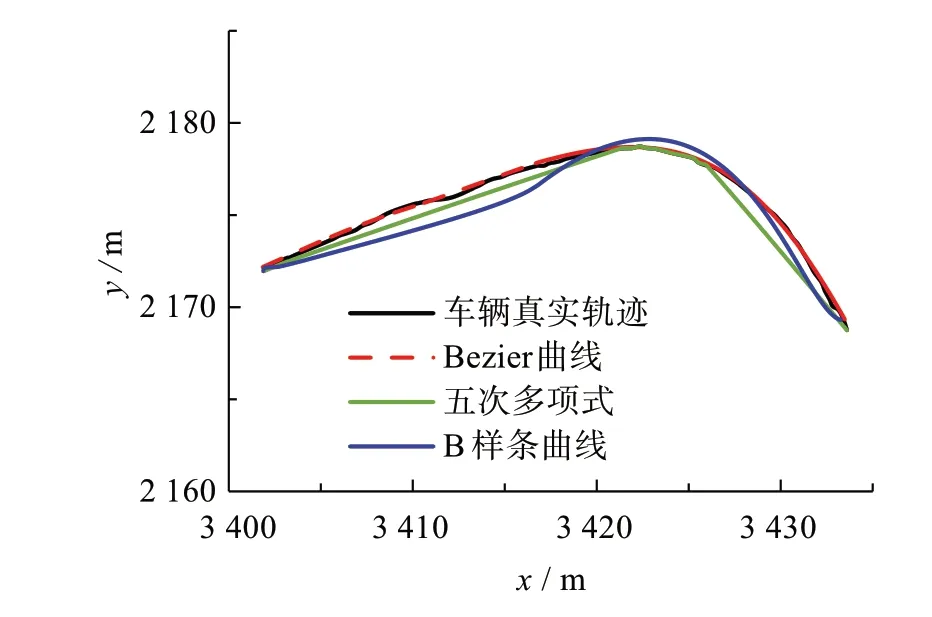
圖10 擬合曲線選擇
Bezier曲線是二維曲線,由起點、終點和控制點組成,通過調整控制點來調整曲線的形狀。給定點P0,P1,…,Pn,則n次Bezier曲線的一般表達式為

對交叉路口附近的直行車輛選取一次Bezier曲線進行軌跡擬合,P0表示起點即輸出駕駛員意圖時對應的坐標,P1表示終點,曲線擬合表達式為:

對交叉路口附近的轉彎車輛選取三次Bezier曲線進行軌跡擬合,P0表示起點即輸出駕駛員意圖時對應的坐標,P1、P2表示控制點,P3表示終點,其表達式為

由此可知擬合曲線首先需要對終點和控制點進行計算。
3.2.1 終點計算
對于駕駛員意圖為直行的目標車輛,出路口時的終點P1離車道沿邊界的距離d1與輸出駕駛員意圖時位置P0離車道沿邊界的距離d0相同,即d0=d1,如圖11所示。
由圖11可知:對于駕駛員意圖為轉彎的目標車輛,車輛初始車速v、加速度a與車輛轉彎半徑有關系,即轉彎半徑越大,終點離車道沿的距離d越大。
通過最小二乘法[18]擬合出d與v、a的關系和終點航向角θend與v、a的關系,如圖12所示。

圖11 目標車輛起終點示意圖
若令x=v/(m·s-1),y=a/(m·s-2),則有:

在圖11中,根據高精度地圖可得知交叉路口2個邊界點lane0和lane1的坐標(xlane0,ylane0)、(xlane1,ylane1),由此可求得終點P3的坐標(xP3,yP3),即:
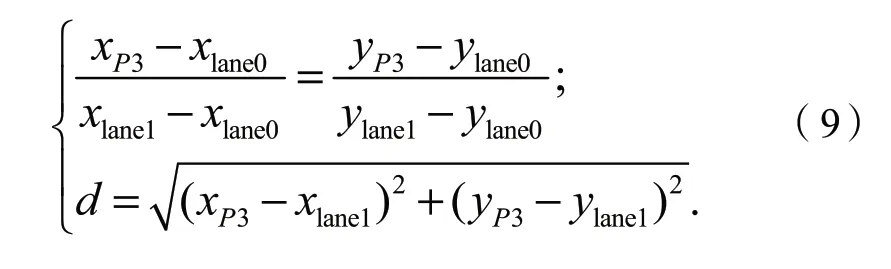

圖12 距離和航向角的擬合等高圖
3.2.2 控制點計算
三階Bezier曲線需要兩個控制點P1和P2來控制曲線的形狀。為了求解控制點坐標,將起點P0位置沿航向角進行延長,將終點P3位置沿航向角反向進行延長,得到交點O,如圖13所示。P1位于線段P0O上,P2位于線段P3O上,將2條線段N等份,然后沿直線快速搜索所有的控制點。
線段P0O的斜率k0如式(10)所示,截距b0如式(11)所示。線段P3O的斜率k1如式(12)所示,截距b1如式(13)所示,即:
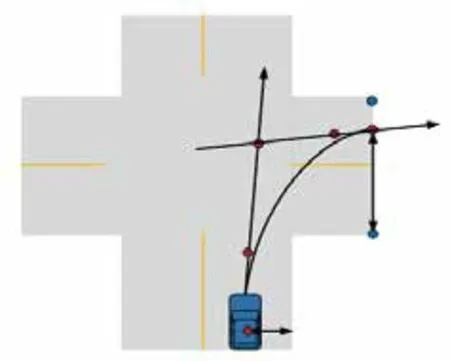
圖13 目標車輛控制點示意圖
式中:θstart為車輛初始位置的航向角即輸出駕駛員意圖時的航向角,θend為車輛終點的航向角即式(8)中擬合出的航向角,(xP0, yP0)為車輛初始位置的坐標即輸出駕駛員意圖時的位置坐標,(xP3, yP3)為終點坐標即式9中求解出的終點坐標。由此,可計算交點O的坐標(xO, yO):

N組對應的控制點(P1,P2)的表達式如式(15),則可以擬合出N條車輛軌跡。

在圖1中9號路口擬合的右轉和左轉車輛軌跡簇如圖14所示。
3.3 軌跡輸出
擬合出車輛的軌跡簇以后,需要選出一條可能性最大的軌跡作為車輛最終的預測軌跡,主要通過代價函數[19]來進行衡量。代價函數COST[·]由2個子代價函數構成:行駛路程代價函數與參考路徑相似性函數,即:

式中:f(s)為擬合的Bezier曲線方程。
行駛路程代價函數:在選取擬合軌跡時出于能耗的考慮,應考慮車輛行駛路程的大小,因此在總代價函數中加入行駛路程代價函數,即:

與參考路徑相似性函數:主要從采集的軌跡簇里面選擇一條參考路徑,使用歐幾里得衡量軌跡的相似程度,使車輛盡量按照參考路徑行駛。歐幾里得通過衡量兩條曲線間的絕對距離來判斷其相似性。與參考路徑相似性函數為

圖14 9號路口擬合車輛軌跡簇

式中:(xi, yi),(i= 1, …,n)表示擬合Bezier曲線離散化后的坐標,(xsi, ysi),(i= 1, …,n),表示參考路徑的坐標。
經過代價函數衡量后選擇代價最小的一條曲線作為最終的預測軌跡進行輸出。圖14中擬合的右轉和左轉車輛軌跡簇經過代價函數后輸出結果如圖15所示,其中紅色軌跡為最終輸出軌跡。

圖15 9號路口預測車輛軌跡簇
4 數據分析
4.1 特征向量相關性大小分析
文中采用的激光雷達單位步長內獲取的每組特征向量包括航向角θ,相對角度Δα,速度v,相對距離Δd,坐標(x, y)。為了盡可能的提高駕駛員分類的準確率,需要選取相關性更強的特征向量。因此將單個特征向量進行輸入測試,訓練集數量為8 870包,測試集數量為210包,其中將x坐標和y坐標一起輸入。
經過試驗結果如表2所示。按照單個特征向量相關性從大到小排列順序為: (x, y)、θ、Δα、Δd、v。為了進一步提高分類模塊的準確率,將單個特征向量進行擇優組合輸入,測試結果如表3所示。
結果表明:輸入特征向量個數越多,模塊分類精度越高,當輸入特征向量為5個時,分類精度就可以達到92.6%可滿足分類精度需求。因此選取坐標(x, y)、航向角θ、相對角度Δα以及相對距離Δd作為駕駛員意圖分類模塊的輸入。
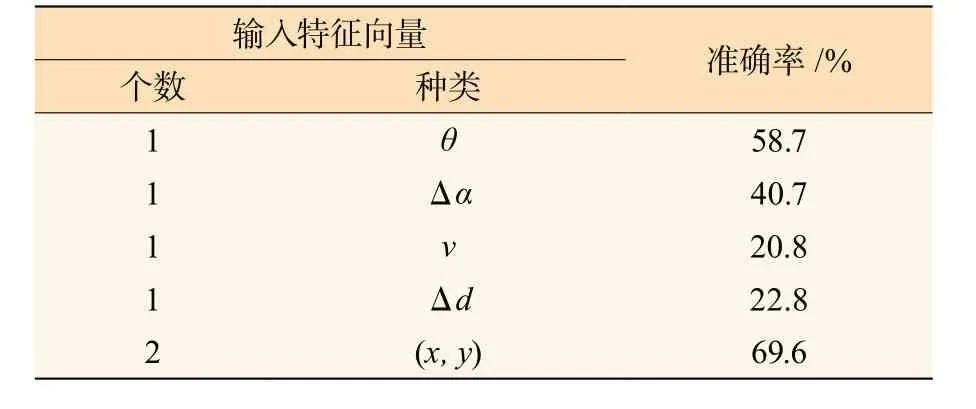
表2 單個特征向量測試結果

表3 組合特征向量測試結果
組合原則:
1) 選擇相關性較大的單個特征向量;
2) 盡可能的保持較高的準確率。
4.2 駕駛員意圖分類結果分析
在圖1中的5、7、8、9號路口對120輛車進行駕駛員意圖識別。表4為駕駛員意圖識別結果,其中有110輛車的駕駛員意圖識別結果準確,駕駛員意圖識別準確率為92.5%。
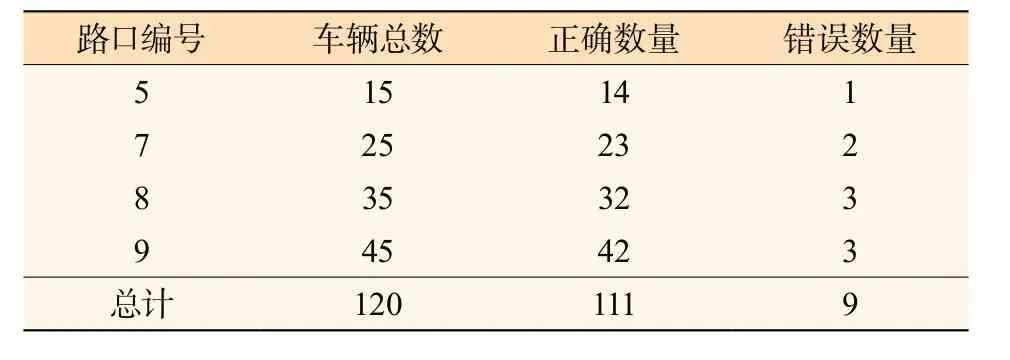
表4 路口駕駛員意圖識別測試結果
為了更好的保證計算的時效性,本文中駕駛員意圖分類算法的訓練和調用是分開進行的,程序中提前將采集的大量數據進行模型的訓練工作。對駕駛員意圖進行識別的時候可以直接調用模型,這樣可以縮短計算的時間。圖16是調用SVM的計算時間統計。主要統計:算法從接收到特征向量后識別對應的駕駛員意圖標簽所用的時間,平均計算時間為8.76 ms。

圖16 調用SVM運行時間

圖17 預測軌跡與真實軌跡對比

圖18 路口車輛真實軌跡與預測軌跡對比
4.3 軌跡預測結果分析
將圖15中右轉車輛輸出的預測軌跡與真實軌跡進行對比結果如圖17a所示,其中藍色軌跡為預測車輛軌跡,紅色為真實車輛軌跡。如圖17b所示為預測軌跡與真實軌跡間的偏差,其中最大偏差為49.6 cm,平均偏差為25.7 cm,上下波動方差為0.018。
對表4中駕駛員意圖識別正確的110輛車進行軌跡預測。如圖18a所示,所有車輛預測軌跡與真實軌跡間的平均偏差為21.4 cm。如圖18b所示,車輛預測軌跡與真實軌跡間最大偏差范圍在22.3~57.9 cm之間。
5 結 論
本文提出了將支持向量機與Bezier曲線相結合的城市交叉路口車輛軌跡預測方法,并且在邊緣計算中心MEC中完成所有的邊緣計算過程。通過對路口車輛通行意圖與軌跡特征進行分析后,將特征向量輸入駕駛員意圖分類模塊進行分類,最后輸出預測的駕駛員意圖。將經Bezier曲線擬合后的多個軌跡輸入到代價函數中,輸出代價最小的一條軌跡作為最終預測軌跡。
經過與2個路口120輛車的真實數據對比,駕駛員意圖分類準確率在92.5%以上,預測軌跡與真實軌跡間的平均偏差為21.4 cm,最大偏差范圍在22.3 ~57.9 cm之間。
因此本文使用的方法能夠滿足城市交叉路口車輛軌跡預測的需求,為無人駕駛車輛軌跡規劃提供先驗信息。
參考文獻 (References)
[1] 徐彪, 張放, 王建強, 等. 連續交叉路口通行輔助系統[J]. 汽車工程, 2016, 38(11): 1344-1350.
XU Biao, ZHANG Fang, Wang Jianqiang, et al. Continuous intersection traff ic assistance system [J].Automotive Engineering, 2016, 38(11): 1344-1350. (in Chinese)
[2] 鄒淵, 張濤, 張旭東, 等. 考慮車流影響的網聯車輛節能駕駛研究[J]. 汽車工程, 2020(10):1320- 1326.
ZOU Yuan, ZHANG Tao, ZHAGN Xudong, et al. Research on energy-saving driving of connected vehicles considering the inf luence of traff ic f low [J].Automotive Engineering, 2020(10):1320-1326. (in Chinese)
[3] XU Ting, JIANG Ruisen, WEN Changlei, et al. A hybrid model for lane change prediction with V2X-based driver assistance [J].Physica A: Statal Mech Appl, 2019, 534: 2-14.
[4] Schubert R, Richter E, Wanielik G. Comparison and evaluation of advanced motion models for vehicle tracking [C]//2008 11th Int’l Conf Info Fusion IEEE, Cologne, Germany, 2008: 1-6.
[5] Brannstrom M, Coelingh E, Sjoberg J. Model-based threat assessment for avoiding arbitrary vehicale collisions [J].IEEE Trans Intell Transp Syst, 2010, 11(3): 658-669.
[6] Houenou A, Bonnifait P, Cherfaoui V, et al. Vehicle trajectory prediction based on motion model and maneuver recognition [C]//2013 IEEE/RSJ Int’l Conf Intell Robo Syst, IEEE, Tokyo, Japan, 2013: 4363-4369.
[7] XIAO Wei, ZHANG Lijun, MENG Dejian. Vehicle trajectory prediction based on motion model and maneuver model fusion with interactive multiple models [J].SAE Int'l J Adv Current Practices in Mobility, 2020, 2: 3060-3071.
[8] FENG Xidong, CEN Zhepeng, HU Jianming, et al. Vehicle trajectory prediction using intention-based conditional variational autoencoder [C]//2019 IEEE Intell Transp Syst Conf (ITSC), IEEE, Auckland, New Zealand, 2019: 3514-3519.
[9] 張星洲, 魯思迪, 施巍松. 邊緣智能中的協同計算技術研究[J]. 人工智能, 2019(5): 55-67.
ZHANG Xingzhou, LU Sidi, SHI Weisong. Research on collaborative computing technology in edge intelligence [J].Arti Intell, 2019(5): 55-67. (in Chinese)
[10] WU Gaoxiang, MIAO Yiming, ZHANG Yu, et al. Energy eff icient for UAV-enabled mobile edge computing networks: Intelligent task prediction and off loading [J].Computer Comm, 2020, 150: 556-562.
[11] Bekkouche O, Taleb T, Bagaa M, et al. Edge cloud resource-aware f light planning for unmanned aerial vehicles [C]//2019 IEEE Wireless Comm Networking Conf (WCNC), IEEE, Marrakesh, Morocco, 2019: 1-7.
[12] Tomar R S, Verma S, Tomar G S. SVM based trajectory predictions of lane changing vehicles [C]//Int’l Conf Compu Intel Commu Networks IEEE, Gwalior, India, 2011: 716-721.
[13] 冷雨泉, 張會文, 張偉. 機器學習入門到實踐[M]. 北京: 清華大學出版社, 2019: 77-86.
LENG Yuquan, ZHANG Huiwen, ZHANG Wei. Introduction to Practice of Machine Learning [M]. Beijing: Tsinghua University Press, 2019: 77-86. (in Chinese)
[14] Lam H T, Bouillet E. Flexible sliding windows for kernel regression-based bus arrival time prediction [C]//Euro Conf Mach Learning Princi Pract of Knowledge Discovery in Databases, Springer Int’l Publishing, Porto, Portugal, 2015: 68-84.
[15] ZHOU Wei, WANG Xiaoping, SUN Haoshui, et al. Trajectory optimization of quadrotor UAV based on Bessel curve [C]//2019 14th IEEE Int’l Conf Electr Meas Instru (ICEMI),IEEE, Changsha, China, 2019: 1434-1440.
[16] YUE Ming, WU Xiangmin, GUO Lie, et al. Quintic polynomial-based obstacle avoidance trajectory planning and tracking control framework for tractor-trailer system [J].Int'l J Control Automa Syst, 2019, 17(3): 2634-2646.
[17] DONG Jiajia, WANG Taiyong, ZHANG Yongbin, et al. Applications of improved B-spline curves to 6R robot trajectory optimization [J].Chin Mech Engi, 2018, 29(2): 193-200.
[18] 姚連璧, 錢瑾斐. 基于移動最小二乘法的軌跡擬合切線方位角計算[J]. 同濟大學學報:自然科版, 2018, 46(11): 121- 125.
YAO Lianbi, QIAN Jinfei. Azimuth angle calculation of trajectory f itting tangent based on moving least squares method [J].J Tongji Univ:Nat Sci Ed, 2018, 46(11): 121-125. (in Chinese)
[19] Devaurs D, Siméon T, Cortés J. Optimal path planning in complex cost spaces with sampling-based algorithms [J].IEEE Trans Automation Sci Engi, 2016, 13(2): 415-424.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
活力(2019年22期)2019-03-16 12:46:58
汽車電器(2018年1期)2018-06-05 01:22:54
紅土地(2016年6期)2017-01-15 13:45:55
汽車與安全(2016年5期)2016-12-01 05:22:10
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2014年7期)2014-02-27 07:28:09
解放軍生活(2013年5期)2013-04-29 21:51:50
