閥體搬運自動導向車軌跡跟蹤控制
2021-07-04 09:58:12孔寧寧朱海清李天津
輕工機械 2021年3期
孔寧寧, 朱海清, 李天津
(江南大學 機械工程學院, 江蘇 無錫 214122)
安全閥作為一種防超壓保護裝置,是承壓設備內必不可少的安全附件,每年至少需要校檢一次。安全閥規格種類多,口徑從DN8到DN500不等,質量大的安全閥接近1 t,然而大多數辦公用房內無法裝備行車等吊裝設備,因此常常使用閥體搬運AGV搬運安全閥。由于閥體搬運AGV的非完整特性,AGV在移動過程中,會出現車體質心位置與幾何中心不完全重合的現象,這會導致AGV在移動過程中偏離既定軌跡。因此提高AGV的底層軌跡跟蹤控制能力有助于其實現更高層次的任務。
為了實現AGV精確地軌跡跟蹤,國內外學者采取了多種控制方法,取得了許多重要的研究成果。目前主流的控制方法有PID控制、Backstepping控制、滑模控制及智能控制等[1-7]。但是很多研究都是在AGV無質心偏移的理想狀態下設計的控制律,對質心偏移下的AGV軌跡跟蹤控制研究相對較少。然而自動導引小車處在非結構化的環境中,會有各種外部干擾等不確定性因素,因而很多應用在確定模型基礎上的控制方法很難實現預期的控制效果[8]。課題組針對運動學模型下質心偏移的閥體搬運AGV,基于改進切換函數,設計了滑模變結構控制器;在此基礎上,引入了基于Lyapunov函數的反饋控制律,得到了一種新型軌跡跟蹤控制器,最后應用MATLAB/Simulink軟件對控制器進行了仿真實驗驗證。
1 AGV的結構及運動學模型
1.1 閥體搬運AGV的系統結構
研究對象是課題組設計的閥體搬運AGV,其結構如圖1所示。該設備主要由車體、承載裝置、控制系統、安全防護系統、運動系統和傳感檢測系統構成。AGV的運動系統由2個同軸驅動輪和若干個起平衡作用的萬向輪組成,采用差速驅動的方式驅動車體轉向。
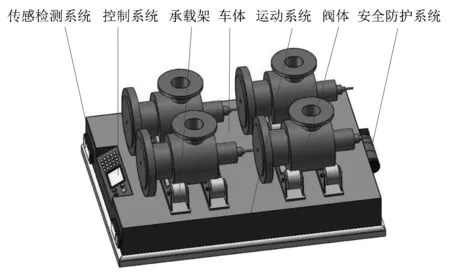
圖1 閥體搬運AGV結構示意Figure 1 Structure diagram of AGV valve body handling
1.2 AGV的運動學建模
閥體搬運AGV運動學模型如圖2所示。該模型是在AGV質心和幾何中心不重合的非理想狀態下建立的,AGV的運動狀態可由D點坐標反映。d為AGV質心c與幾何中心D之間的距離。
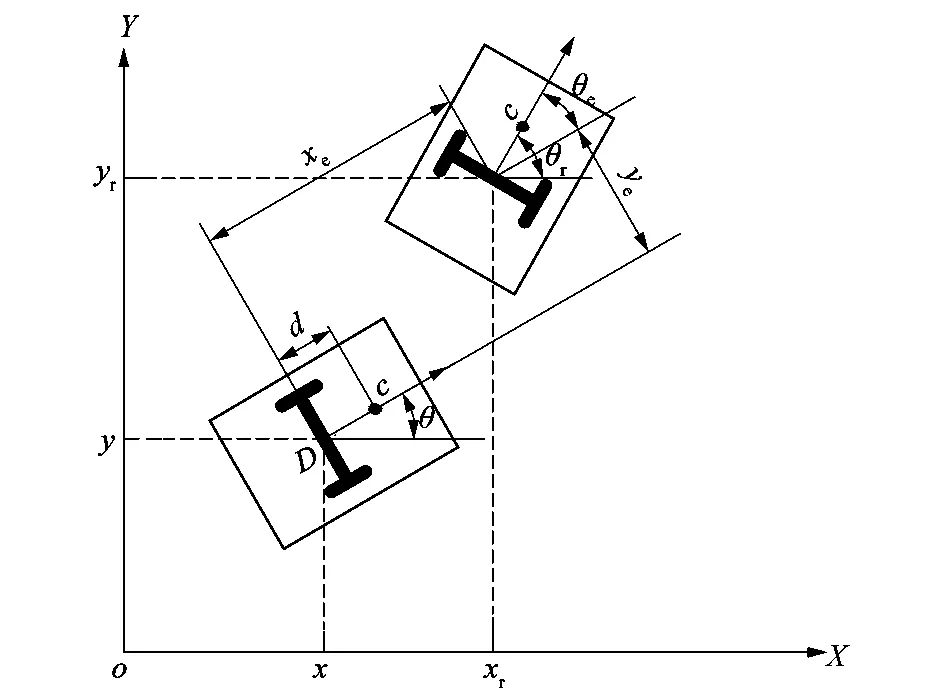
圖2 AGV運動模型示意Figure 2 Schematic diagram of AGV motion model
設實際位姿P=(x,y,θ)T,控制輸入q=(v,w)T。其中:(x,y)為車體幾何中心D點坐標;v為線速度;ω為角速度;θ為機器人運動方向和X軸夾角。
因此閥體搬運AGV的運動學模型為
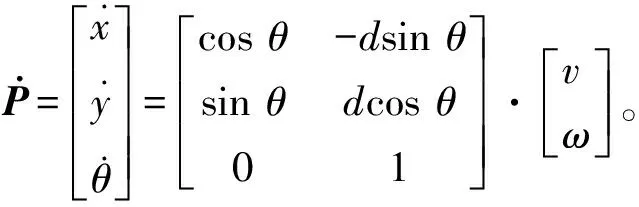
(1)
設理想位姿Pr=(xr,yr,θr)T,速度指令qr=(vr,wr)T。從P移動到Pr所產生的誤差Pe=(xe,ye,θe)T。因此,位姿誤差方程為
(2)
對式(2)求導并結合式(1),可得位姿誤差微分方程:
(3)
由式(3)所建立的質心偏移下閥體搬運AGV的運動學位姿誤差微分方程,通過設計合適的控制輸入q=(v,w)T,無論AGV初始狀態時的誤差是多少,在輸入q的作用下從實際位姿移動到理想位姿時產生的誤差Pe有界且收斂,即
limt→∞‖(xe,ye,θe)‖=0。
2 跟蹤控制器的設計
2.1 切換函數的設計
引理:對任意x∈R且∣x∣<∞,有
φ(x)=xsin (arctanx)≥0,


由以上結論,設計切換函數:
(4)
2.2 新型軌跡跟蹤控制器
(5)
令α=arctan (vrye),由式(4)~(5)可得:
(6)
代入式(3)經整理得:
(7)
現引入Lyapunov反饋控制律:
(8)
式中:k1,k2和k3為正常數。
得到新型軌跡跟蹤控制律:
(9)

3 仿真實驗
為驗證課題組設計的控制律式(9)的有效性,在MATLAB/Simulink環境下,針對圓軌跡進行仿真。取控制器參數ε1=ε2=50,k1=10,k2=24,k3=10,質心偏移量d=0.3 m。設置初始位姿誤差為[3,0,0],vr=1.0 m/s,wr=1.0 rad/s。
仿真結果圖3~6表明,課題組所設計的控制律能夠很好地實現軌跡跟蹤效果,位姿誤差在不到5 s的時間里均能平穩地進入穩態并逐漸收斂到0。
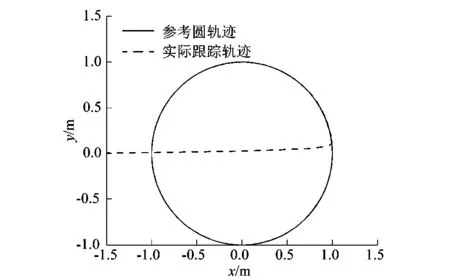
圖3 軌跡跟蹤Figure 3 Trajectory tracking

圖4 x軸方向誤差Figure 4 Axis error in x direction
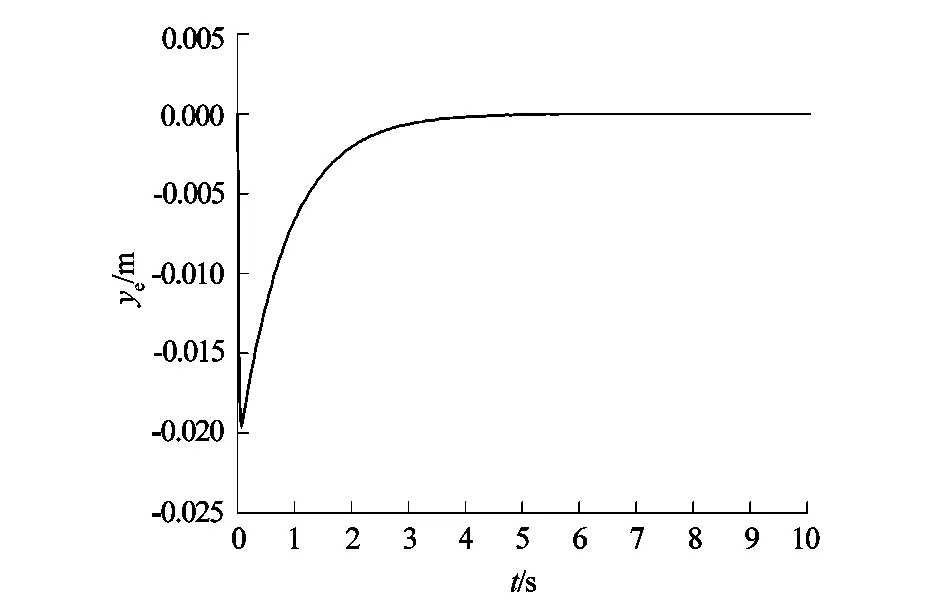
圖5 y軸方向誤差Figure 5 Axis error in y direction
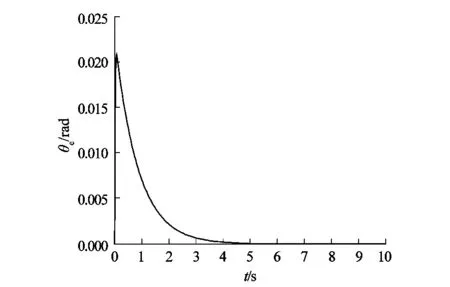
圖6 航向角誤差Figure 6 Heading angle error
為突出控制律式(9)的優勢,同樣設置初始位姿誤差為[3,0,0],vr=1.0 m/s,wr=1.0 rad/s,取上節同樣的參數,質心偏移量d=0。對參考文獻[10]中的控制律和課題組設計的控制器進行仿真對比。
從圖7和圖8的對比可以看出,采用課題組所設計的控制律可以更精確地實現對目標軌跡的跟蹤。圖9~11表明在課題組設計的控制律的作用下,x軸方向誤差收斂速度比文獻[10]中提前了1 s左右,y軸方向和航向角誤差均提前了3 s左右,并且能夠更加精確地達到預期目標。
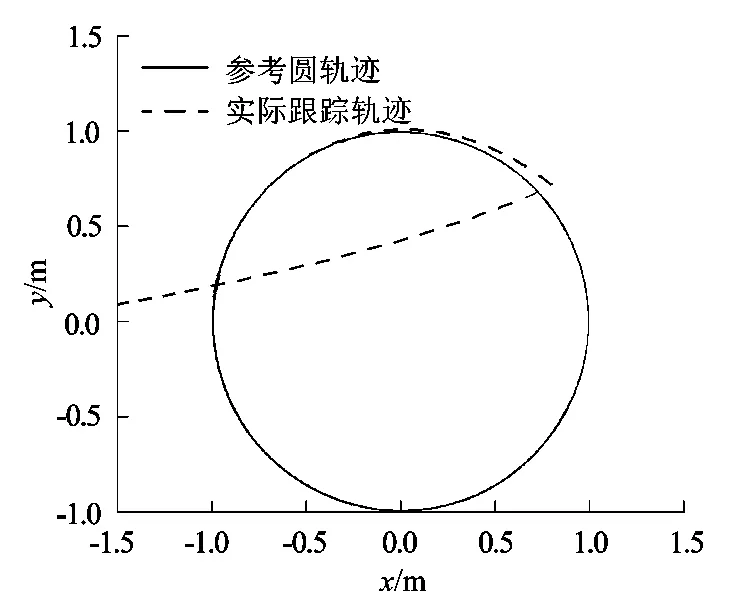
圖7 參考文獻[10]中控制器Figure 7 Controller in reference [10]
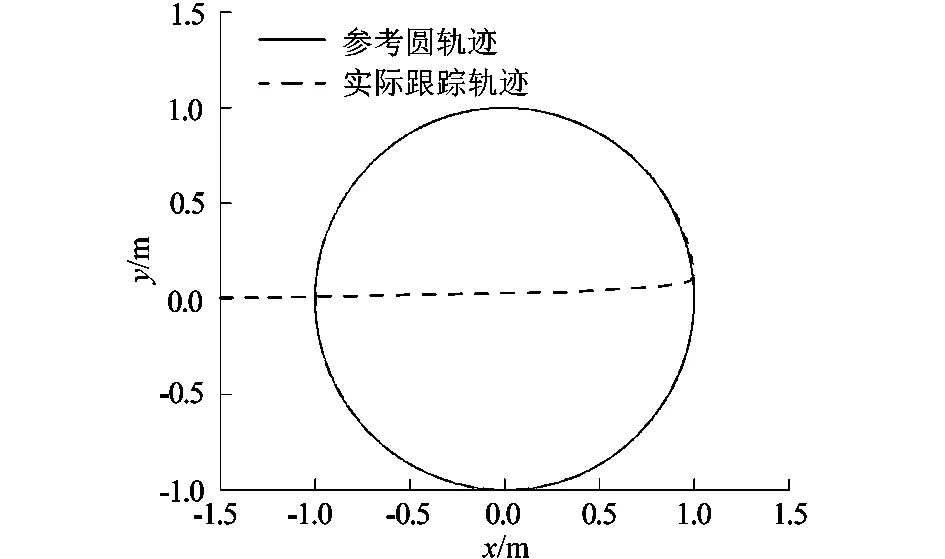
圖8 本設計中的控制器Figure 8 Controller designed in this paper
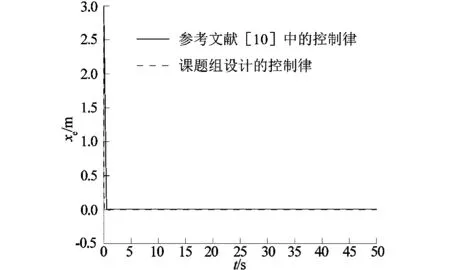
圖9 x軸方向誤差Figure 9 Axis error in x direction

圖10 y軸方向誤差Figure 10 Axis error in y direction

圖11 航向角誤差Figure 11 Heading angle error
4 結語
課題組針對質心偏移的閥體搬運AGV運動學模型,在改進滑模切換函數的基礎上,引入了基于Lyapunov函數的反饋控制律,提出的新型軌跡跟蹤控制律計算簡單,有效的提高了閥體搬運AGV的軌跡跟蹤精度,使其移動軌跡能夠平滑快速地逼近目標軌跡,具有很強的魯棒性和穩定性,為其它質心偏移的輪式移動機器人軌跡跟蹤控制器的設計提供了參考。未來如何優化控制算法中的參數將是今后研究的一個重點。另外本研究中的控制器是基于AGV運動學模型設計的,有關動力學特性對質心偏移AGV軌跡跟蹤的影響還有待進一步研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
